

|
|
|
11.2.8. Обработка цифровых фотоснимков |
||||
|
Обработка цифровых фотоснимков производится по следующе- |
||||||
му алгоритму: |
|
|
|
|
|||
|
• Фотокалибровка. |
|
|
И |
|||
|
• |
Получение файлов привязки. |
|
||||
|
|
|
|||||
|
• Трансформирование фотоснимков на плоскую поверхность с |
||||||
пониженным разрешением. |
|
|
|||||
|
• Отбор фотографий. |
|
|
|
|||
|
• Создание матрицы рельефа по данным лазерного сканирования. |
||||||
|
• |
|
|
|
|
Д |
|
|
Трансформирование отобранных фотографий по данным ЭВО |
||||||
и матрицы рельефа с разрешением, отвечающим требованиям целевой |
|||||||
задачи. |
|
|
|
|
|
|
|
|
• Создание фотомозаики и оформление ортофотопланов. |
||||||
|
|
|
|
|
А |
|
|
|
Для аналитического трансформирования снимков используются |
||||||
алгоритмы на основе аналитических зависимостей, в которых в каче- |
|||||||
стве исходных данных выступают: |
|
|
|||||
▪ элементы внутреннего ориентирования снимка f, xº, yº; |
|||||||
|
|
|
|
б |
|
|
|
▪ |
элементы внешнего ориентирования (ЭВО) снимка (угловые – , |
||||||
|
, и линейные Xs,Ys, Zs − координаты центра фотографирования); |
||||||
▪ |
матрица рельефа. |
|
|
|
|||
ства обработкигеопространственных данных как элемента геоинфор- |
|||||||
|
|
|
11.3. Программный комплекс ALTEXIS |
||||
|
Программный комплекс ALTEXIS разработан компанией «Гео- |
||||||
космос» |
предназначен для о ра отки данных комбинированной |
||||||
воздушной лазерно-локац онной и цифровой аэрофотографической |
|||||||
С |
|
|
|
|
|||
съемки, а также для метрологического обеспечения аэросъемочных |
|||||||
работ с |
|
спользован ем лазерно-локационной аппаратуры программ- |
|||||
ного комплекса ALTEXIS. Версия 2.0 является дальнейшим развитием л нейки программных продуктов семейства ALTEXIS компании «Геокосмос», используемой в качестве базового программного сред-
мационной технологии крупномасштабного картирования реального времени, предложенной и активно развиваемой компанией «Геокосмос» в последние годы.
Программный комплекс ALTEXIS выполняет задачи по метрологическому обеспечению аэросъемочного комплекса, в частности, по проведению калибровочной процедуры лазерного локатора и цифро-
128
вого аэрофотоаппарата, он может быть использован для контроля качества пилотирования и оценки степени достоверности собранных аэросъемочных данных. Кроме того, ALTEXIS реализует широкий набор алгоритмов камеральной обработки аэросъемочных данных: геоморфологический анализ и выделение рельефа, создание ортофотокарт, автоматическая селекция лазерных точек, выделение географических объектов, моделирование ЛЭП, оценка лесотехнических параметров и многое другое.
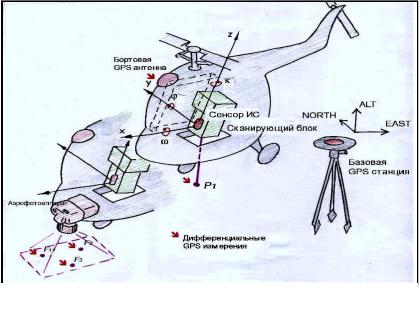
Необходимым условием при проведении работ по лазернолокационной съёмке является точное определение параметров взаимного положения и ориентации на борту носителя компонентов, участвующих в получении аэрофотосъёмочных данных, сенсора инерциальной системы, фазового центра GPS-антенны, центра проекции и оптической оси фотокамеры. Требования к точности определения указанных параметров чрезвычайно высоки. Точность для линейных
|
|
|
|
|
величин |
не |
хуже |
|
|
|
|
|
|
И |
|||
|
|
|
|
|
1–2 см, для угловых |
|||
|
|
|
|
|
– не хуже 2–3 мрад. |
|||
|
|
|
|
|
ля |
определения |
||
|
|
|
|
|
выставочных |
(off- |
||
|
|
|
|
|
set) |
|
параметров |
|
|
|
|
|
Д |
|
|
||
|
|
|
А |
сканерного блока и |
||||
|
|
|
антенны |
GPS |
ис- |
|||
|
|
|
пользуется |
про- |
||||
|
|
|
грамма |
|
оff-setter, |
|||
|
|
|
реализующая мето- |
|||||
|
|
|
|
|
||||
|
|
|
|
|
дику |
|
измерений, |
|
|
Р с. 11.3. |
метод ки |
змерений для определения |
представленную на |
||||
|
рис. 11.3. Опреде- |
|||||||
|
|
б |
|
|||||
|
|
|
|
|
|
|
||
|
выставочных параметров (off-set) |
|
|
|
|
|
||
|
ис |
|
|
ление в программе |
||||
Схема |
|
|
|
|
|
|
|
|
полностью формал зовано. Пользователю необходимо лишь выполнить определение пространственных координат набора характерных точек (см. р . 11.3) полученные результаты занести в соответствующие поля программы вместе со значениями углов текущей ориентации сенсора инерциальной системы в момент проведения измерений. Измерения пространственных координат характерных точек выполняются GPS-приёмниками в локальной вспомогательной системе координат без привязки к ГГС.
129
По аналогичной методике с помощью программы оff-setter определяются точные относительные координаты центра проекции фотоаппарата и приближённые значения углов ориентации его опти-
ческой оси во внутренней системе координат сенсора инерциальной системы. Точные значения углов ориентации, необходимые для выполнения ортотрансформирования аэрофотоснимков, определяются только в результате выполнения лётной калибровочной процедуры, после первой калибровки. Для обработки результатов такой процедуры используется программа Calibry, что обеспечивает точность угловых параметров для прямого геопозиционирования аэрофотоснимков.
точное количество опознаков на аэрофотоснимкеИи лазернолокационном изображении и определены их пространственные коор-
В ходе калибровочной процедуры выполняется съёмка калибровочного объекта с одновременым использованием как лазерного ска-
нера, так и фотоаппарата. По полученным лазерно-локационным
данным объекта в программе Calibry определяются пространственые координаты опознаков. После того как оператором выделено доста-
динаты, программа автоматически вычисляет точные значения угловых параметров.
Абсолютное ориентирование аэрофотоснимка в геодезическом
• Ф ксац я до четырех отражений одного посланного импульса (возможность разделения верха растительности и поверхности
пространстве может |
выполнено методом обратной фотограм- |
|
|
|
Д |
метрической засечки по выделенным опознакам. |
||
11.4. Основные возможности воздушных сканеров ALTM |
||
|
А |
|
• Ф ксац я нтенс вности отраженного сигнала (возможность |
||
работы в ночное время). |
|
|
быть |
|
|
овместимость• |
с цифровыми аэрофотоаппаратами и други- |
|
земли). |
|
• |
амая высокая производительность из коммерчески доступ- |
ных систем на сегодняшний день – 1000 км2 за рабочий день. |
|
Сми сенсорами и датчиками. |
|
•Возможность использования с приемниками GPS и GPS/GLONASS различных производителей.
•Наличие согласованной схемы установки на отечественные летательные аппараты.
•Адаптация к российским условиям.
130
• Экономическая эффективность использования в тех условиях, когда применение других методов крайне затруднительно, невозможно или ограничено сезонными факторами (безориентирная местность, сплошная листва, очень «плоский» рельеф и т.д.).
|
Лазерный сканер ALTM (рис. 11.4) включает: |
И |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
− бортовой навигационный ком- |
||
|
|
|
|
плекс; |
|
||
|
|
|
|
|
− бортовой комплекс геодезиче- |
||
|
|
|
|
ского обеспечения GPS/GLONASS; |
|||
|
|
|
|
|
− приемник GPS Trimble 750. |
||
|
Рис. 11.4. Комплект ALTM |
|
|
Д |
|||
|
|
|
|
|
|||
|
|
|
|
|
|
Основные технические параметры |
|
|
|
|
А |
|
|||
Наименование параметра |
|
ALTM 30/70 |
|
ALTM 3100 |
|||
Частота зондирующих |
|
33 кГц |
|
|
33 кГц |
||
импульсов |
|
|
|
|
|
|
|
|
|
|
|
50 кГц |
|
|
50 кГц |
|
|
|
|
70 кГц |
|
|
70 кГц |
|
|
|
|
|
|
|
100 кГц |
Высота полета при съемке |
|
От 200 до 3000 м |
От 80 до 3500 м |
||||
|
канирующий |
|
|
|
|
|
|
Точность сканирования по |
|
Не хуже 15 см |
Не хуже 15 см |
||||
высоте |
|
|
|
|
|
|
|
|
|
|
|
при высоте 1200 м |
при высоте 1200 м |
||
|
|
|
|
Не хуже 35 см |
Не хуже 25 см |
||
|
|
|
|
при высоте 3000 м |
при высоте 2000 м |
||
С |
|
|
|
|
|
Не хуже 35 см |
|
Рег страц я данныхбПереносной жесткий диск |
при высоте 3000 м |
||||||
(37 Гбайт) |
|||||||
Расход мость лазерного луча |
|
Двойная |
|
|
Двойная |
||
|
|
|
|
0,2 или 0,7 мрад |
0,3 или 0,8 мрад |
||
Диапазон рабочих температур: |
|
|
|
|
|
||
- с |
|
блок: |
|
От -20 до +35 °C |
От -10 до +35 °C |
||
- стойка управления: |
|
От +10 до +35 °C |
От +10 до +35 °C |
||||
- при термостабилизации |
|
От -30 до +55 °C |
От -30 до +55 °C |
||||
Габариты/Вес
-с блок 25 W x 32 L x 56 H см/20 кг 26 W x 19 L x 57 Hсм/23,4 кг
- стойка управления 59 W x 58 L X 49 H см/55 кг 65 W x 59 L X 49 Hсм/53,2 кг Общие параметры Точность определения планового Лучше, чем 1/2000 от высоты положения точек
131
Ширина полосы съемки |
От 0 (режим профайлера) до93% от высоты |
|||
|
|
съемки |
|
|
Разрешение по дальности |
1 см |
|
|
|
Количество регистрируемых |
4, включая последний |
|
||
отражений лазерного импульса |
|
|
|
|
Регистрация интенсивности |
12 бит динамический диапазон для каждого |
|||
|
|
измерения |
|
|
Угол сканирования |
От 0 до + 25° |
|
||
Компенсация крена |
Номинально ±5°, в зависимости от текущего |
|||
|
|
значения поля зрения (например, при ±15° |
||
|
|
допустимое значение компенсации ±10°) |
||
Ширина полосы захвата |
От 0 до 0,93 Hм |
|
||
Частота сканирования |
0 – 70 Гц, зависит от угла сканирования |
|||
Распределение отражений на |
Равномерное на протяжении 96% линии |
|||
поверхности земли |
сканирования |
|
||
Используемый бортовой |
Applanix POSAV, модифицирован |
|||
навигационный комплекс |
|
|
И |
|
Бортовой GPS приемник |
Trimble 750 |
|||
|
|
|
|
|
Категория лазера |
|
Class 4 |
|
|
Высота безопасного зрения |
200 м при 0,7 мрад 400 м при 0,2 мрад |
|||
Потребление |
|
28 В переменного тока, 24 А в среднем, |
||
|
|
35 пиковое потребление |
||
Влажность |
|
0 – 95% без конденсата |
|
|
|
|
|
Д |
|
|
Перечень программного обеспечения |
|||
Программное о |
|
|
Назначение |
|
REALM Survey Suite |
Получение дифференциального |
|||
|
|
А |
|
|
|
|
кинематического GPS решения. |
||
|
|
Оптимизация траектории при |
||
|
|
спользовании нескольких базовых |
||
|
бстанций. Вычисление XYZ координат |
|||
|
|
лазерных точек. Селекция лазерных |
||
|
|
точек, выделение земли и растительности. |
||
Applanix PosGPS |
Совместная обработка GPS/GLONASS и |
|||
еспечение |
инерциальных данных. |
|
||
Applanix PosProc |
Планирование и управление |
|||
ALTM-NAV |
|
аэросъемочным процессом. |
||
Опция «Регистрация формы отраженной волны» представляется |
||||
Счрезвычайно полезной для лазерных локаторов импульсного типа. Ее |
||||
можно рассматривать как дальнейшее развитие технологии измерения
132

нескольких отраженных импульсов в каждом акте сканирования, которая уже давно вошла в практику.
Последние разработки компании Optech ALTM 30/70 обеспечи-
вают регистрацию четырех откликов для каждого зондирующего им- |
||||||
пульса, гарантированно включая первый и последний. Технология ре- |
||||||
|
|
|
|
И |
||
гистрации формы отраженной волны предполагает запись в цифровом |
||||||
виде полной формы отклика на каждый зондирующий импульс с ча- |
||||||
стотой дискретизации 1 ГГц и выше. Зарегистрированная таким обра- |
||||||
|
зом волна дает «историю» отраже- |
|||||
|
ния зондирующего |
импульса от |
||||
|
|
Д |
|
|||
|
всех препятствий, встретившихся на |
|||||
|
его пути. Аппаратная реализация |
|||||
|
такой возможности не представляет |
|||||
|
проблемы для ведущих производи- |
|||||
|
телей, в частности, такая опция уже |
|||||
|
А |
|
|
|
||
|
поставляется штатно в уже упомя- |
|||||
|
нутом |
лазерном |
|
сканере |
||
объекта |
ALTM 30/70 фирмы Optech. В ре- |
|||||
|
зультате можно, кроме картографи- |
|||||
б |
|
|
|
|
|
|
рования объекта, получить его трехмерный образ (рис. 11.5). |
|
|||||
Наибольший интерес такая информация может представлять для |
||||||
использования в специализированном программном обеспечении об- |
||||||
работки лазерно-локационных данных для более достоверного распо- |
|||
|
сива |
|
|
знавания и геопозиционирования о ъектов различных классов. |
|||
|
Использован е лазерно-локационных методов открывает ряд |
||
пр нц п ально новых возможностей при дистанционном обследова- |
|||
н |
лесных |
масс вов. Высокая |
производительность лазерно- |
локац онной съемки (150 – 200 км2 |
или 300 – 400 км линейных объ- |
||
С |
|
|
|
ектов за од н аэросъемочный день) в сочетании с пространственным |
|||
разрешен ем |
точностью до 15 см позволяют создавать эффективные |
||
алгор тмы морфолог ческого анализа, обеспечивающие автоматическое выделение ряда важнейших информационных параметров лесного мас .
Известно, что использование традиционных аэросъемочных технологий сильно затруднено как для измерения истинного рельефа под кронами деревьев, так и для оценки геометрических характеристик самих деревьев и объема древесной массы. Современные лазер- но-локационные методы предлагают ряд принципиально новых возможностей при обследовании лесных ландшафтов:
133
• Зондирующий луч лазерного локатора обладает способностью проникать сквозь листву деревьев в силу чего лазерно-локационные методы позволяют непосредственно измерять рельеф под кронами деревьев с абсолютной геодезической точностью до 15 см. Практика показывает, что густота лесного покрова может сказаться на объеме авиационных работ, необходимом для измерения рельефа того или иного района с требуемой степенью детальности, но не оказывает влияния на принципиальную возможность выполнения таких измерений.
• Реализация режима работы лазерного локатора, при котором за каждый акт сканирования регистрируется группа отраженных импульсов, позволяет наряду с топологией земной поверхности получать данные, характеризующие растительность. Так, первый (по времени) отраженный импульс будет характеризовать высоту деревьев, а пространственное распределение откликов, приведенное к вертикаль-
ному направлению, может быть использовано для оценки интенсив- |
|
ности поглощения и, следовательно, для оценки плотности древесной |
|
массы. |
И |
|
|
• Использование в составе современных лазерных локаторов |
|
универсальных навигационных комплексов, включающих аппаратуру |
|
спутниковой навигации GPS, GLONASS и инерциальные системы, |
|
позволяет естественным о разом интегрироватьДлазерно-локационные |
|
данные с цифровой фотографической, мультиспектральной и тепло- |
|
интегрирования• Анал збструктуры полога древостоя, интегрированный с дан- Сными в деофотосъемки позволяет с высокой степенью достовер-
визионной съемкой при нео ходимой геодезической точности. Это |
||
также |
чрезвычайно важно при оценке фаз вегетации, определении |
|
нал ч |
я болезней растен й, химического состава почвы, наличия за- |
|
грязнен й водоемов. |
А |
|
|
||
ности определять разл чные типы и ярусы лесной растительности с разделен ем по породному составу, густоте и другим параметрам. Последующая обработка данных лазерного профилирования путем , преобразования Фурье и анализа методом средней свободной компоненты позволяет получить такую важную и точную
информацию о растительности, как запас древостоя, тип леса, индекс листовой поверхности, напрямую или опосредованно – через значения диаметра крон, густоту, протяженность полога и высоту древостоя. Достаточно высокую точность при обработке лазерных профилей обеспечивают методы регрессионной оценки фитомассы древостоя.
134