

|
|
3 |
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
2 |
|
2 |
|
2 |
2 |
|
|
|
|
|||
|
|
|
|
|
|
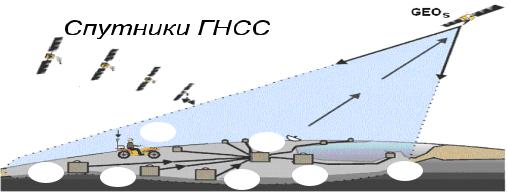
Рис. 10.11. Принцип работы системы OmniSTAR [48]
Точность позиционирования с коррекциейДOmniSTAR для коммерческих приемников высокого качества с вероятностью 95% со-
Результаты измерений на референцных станциях 2 через выделенные каналы передаются в центры сбора и управления 1. Эти центры принимают данные, контролируют их и передают на геостационарный спутник GEOS для трансляции в L-диапазоне на приемники потребителей 3 с целью получения оптимального решения путем взвешенной обработки данных референцных станций, причем веса являются функциями расстояний между потребителем и станциями. В результате множество коррекций по каждому спутнику заменяется
единственной оптимальной.
ставляет менее 1 м по плановым координатам и 2–2,5 м по высоте.
В настоящее время ра отает несколько ДПС аналогичного класса:
• на |
|
континенте – WAAS (Wide Area Augmenta- |
tion System) |
LAAS (Local Area Augmentation System); |
|
|
|
А |
• в Европе – EGNOS (European Geostationary Navigation Overlay |
||
System); |
|
|
• в Япон – MSAS (MTSAT Space-based Augmentation System, |
||
где MTSAT – MultifunctionalбTransport Satellite System). |
||
В Росс |
рег ональные дифференциальные подсистемы и стан- |
|
американском |
|
|
С |
|
|
ц только нач нают разв ваться, и главной преградой на их пути являются законодательные ограничения точности.
10.3.3. Навигационные сигналы GPS, ГЛОНАСС и Galileo
Высокоточное решение навигационных задач предполагает синхронизацию хода часов в приемной аппаратуре и на спутниках, точное определение их положения в планетарной системе координат и
86
наличие измерительных спутниковых сигналов с точными радиотехническими параметрами.
Счет времени. Определение расстояния между движущимися со скоростью около 3,9 км/с спутниками и наземными пунктами вы-
полняется путем измерения времени прохождения радиосигнала между этими точками. Громадная скорость распространенияИсигнала
(около 300 000 км/с), требует точной синхронизации времени в спутниковых системах.
В связи с этим на главных станциях управления любой СНС устанавливает системное время, принимаемое за эталон и поддерживаемое высокоточным генератором шкалы времени на основе водородного
ется полиномами первой или второй степениД, коэффициенты которых передаются на спутники и в последующем включаются в навигационную информацию, поступающую в спутниковые приемники.
стандарта, нестабильность которого оценивается на уровне (1–5) 10-14.
На спутниках установлены генераторы частоты на основе цезиевого и рубидиевого стандарта с погрешностью хода порядка 1 10-13;
уход шкал времени спутниковАотносительно эталона аппроксимиру-
Время в системе GPS имеет собственную шкалу и обозначается в виде «N:S», гдебS – номер секунды в неделе, а N – номер недели в диапазоне от 0 до 1023, начиная с 0 часов 06.01.1980 г., увеличивающийся на единицу, когда S = 604 800; после N = 1023 счет недель
начинается с нуля.
волами UTC (USNO) ли UTC (GPST), передается в навигационном
Различиямежду шкалой координированного времени UTC (Universal Time Coordinated) временем GPS, которое обозначается сим-
сообщен .
СВремя в с стеме ГЛОНАСС устанавливается в соответствии с Государственным эталоном частоты и времени Российской Федера- ц . Оно сдв нуто относ тельно времени UTC на 3 ч, корректируется одновременно с н м обозначается UTC (SU); величина поправки указывается в навигационном сообщении. Счет времени выполняется с 00h00m00s 1 января последнего високосного года.
Координатное обеспечение. Для построения математической модели движения спутника используется общеземная (планетарная) система координат, в качестве которой могут использоваться геоцентрические системы ITRS (Terrestrial Reference System), ITRF (ITRS Terrestrial Reference Frame), WGS-84 (World Geodetic System, 1984), ПЗ-90.02.
87
Передаваемые со спутников навигационные сообщения содержат не координаты спутника и изменения вектора его скорости, а относительно медленно меняющиеся параметры некоторой модели, которая аппроксимирует траекторию полета космического аппарата на
достаточно большом интервале времени [5]. Соответствующая обра- |
|
|
И |
ботка этих данных позволяет вычислить координаты спутника на |
|
нужный момент времени. |
|
В системе GPS используется общеземная система координат WGS-84 и Кеплеровская модель движения с оскулирующими элемен-
тами. При этом траектория полета спутника разбивается на участки ап- |
|
проксимации длительностью в 1 ч. |
Д |
|
|
Потребителю навигационной информации передается положение центральной точки участка, параметры движения на соответствующий момент времени, а также параметры модели оскулирующих элементов и функций, аппроксимирующих изменения параметров модели во времени, как предшествующем узловомуАэлементу, так и следующем за ним.
В системе Глонасс для определения точного положения спутника используются общеземная система координат ПЗ-90.02 и дифференциальная модель движения, в которой координаты и составляющие вектора скорости спутникабопределяются численным интегрированием дифференциальных уравнений его движения, учитывающих конечное число действующих сил. Начальные условия интегрирования задаются на середину интервала аппроксимации.
моделиВ системе Galileo в качестве наземной опорной системы координат план руется спользовать систему GTRF, независимую от WGS-84 согласованную с ITRF. Описание этой системы, модели движения спутн ков на участке траектории и перечень параметров ее аппрокси-
мац в техн ческой л тературе не приводятся.
СигналыНав гац онные с гналы. Каждый спутник на строго опреде-
ленных частотах генер рует сигналы, в которые путем модуляции встра ваются дополн тельные данные, включающие измерительные коды и навигационные сообщения (свои эфемериды, данные о точности
часов, параметры ионосферной задержки, временные метки и
альманах). оответствующая обработка принятых спутниковым приемником сигналов позволяет вычислить положение фазового центра его антенны в нужной координатной системе.
передаются на близких и частично перекрывающихся участках частотного спектра и обозначаемых символами L, G и E, обозначающими принадлежность системе (рис. 10.12).
88
|
GPS |
|
Galileo |
|
GPS |
ГЛОНАСС |
Galileo |
|
GPS |
|
E2 |
GPS |
E1 |
ГЛОНАСС |
|
|
|
L5 |
|
E5 |
|
L2 |
G2 |
|
E6 |
|
L3, L4 |
|
L1 |
G1 |
|
||
|
|
|
|
|
|
|
|
|
||||||||
1164 |
|
|
1215 |
|
1260 |
1300 |
1559 |
|
|
1600 МГц |
||||||
|
|
|
Рис. 10.12. Частотный план систем GPS, ГЛОНАСС и Galileo |
|||||||||||||
|
|
Система GPS использует 5 сигналов L1 L5 (в том числе L3 и L4 |
||||||||||||||
для военных пользователей и сигнал L5), система ГЛОНАСС – 2 сиг- |
||||||||||||||||
нала G1 и G2, а система Galileo – 10. |
|
|
|
|
|
|
|
|
||||||||
|
|
Встраивание в сигналы дополнительной информации (измери- |
||||||||||||||
тельных кодов, навигационных сообщений и пр.) выполняется путем их м о д у л я ц и и, путем «переброски»Дфазы (метод ФМ) несущего
сигнала на 180 в моменты, когда бинарный код 0 встраиваемого сигнала изменяется на 1, на 0 или с 0 на 1. В приемной аппаратуре эта дополнительная информация выделяется из сигнала путем его д е м о -
|
д у л я ц и и [32]. |
|
|
|
|
|
|
А |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Частотные характеристики сигналов спутников GPS, ГЛОНАСС |
|||||||||||||||
|
и Galileo приведены в табл. 10.4. |
|
|
И |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 10.4 |
||
|
|
|
|
|
|
|
|
|
|
|
|
Наименование ГНСС |
|
|
|
||
|
Параметр |
|
б |
|
|
|
|
|
|
||||||||
|
|
|
|
|
GPS |
|
|
|
|
ГЛОН СС |
|
Galileo |
|
|
|||
|
Метод разделения |
CDMA (кодо- |
|
FDMA (частотный) |
CDMA (кодовый) |
|
|||||||||||
|
|
|
|
|
вый) |
|
|
|
|
|
|
|
|
|
|
||
|
Рабочая частота сиг- |
L1 |
1575,420 |
G1 |
1598,0625-1605,3750 |
E2-L1-E1 1559 – 1592 |
|
||||||||||
|
|
передачи |
|
|
|
G2 |
|
ВТ - ПСП |
E6 |
1260 – 1300 |
|
||||||
|
нала, МГц |
|
L2 |
1227,600 |
1242,9375-1245,6250 |
|
|||||||||||
|
|
|
|
L5 |
1176,450 |
|
|
|
|
E5 |
1164 – 1215 |
|
|||||
|
Скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(GPS, Galileo – |
|
C/A 1,023 |
|
|
СТ |
0,5110 |
E2-L1-E1 B/C |
2 |
|
|||||||
|
Мч п/c |
|
P |
10,23 |
|
|
ВТ |
5,1100 |
E6,E2-L1-E1 A 5 |
|
|||||||
|
ГЛОНАСС – |
|
|
|
|
|
|
|
|
|
|
|
E5 |
|
10 |
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Мб т/c) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C/A |
|
|
2 |
|
|
|
|
|
E2-L1-E1 B/C |
4 |
|
|
|
Ш р на полосы, |
|
|
P |
|
20 |
|
|
|
СТ |
1 |
E6 |
|
24 |
|
||
|
МГц |
|
|
|
L5 |
|
24 |
|
|
|
ВТ |
10 |
E2-L1-E1 A |
32 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E5 |
|
40 |
|
|
|
|
|
C/A - код |
СТ - m-последовательность |
|
|
|
|
||||||||
|
Тип кода |
|
|
Голда |
|
|
|
|
|
|
Нет данных |
|
|
||||
|
|
|
|
P - ПСП |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
C/A |
1023 |
|
|
|
|
|
|
|
|
||||
|
Длина кода |
|
|
P-код |
|
|
|
СТ |
511 |
|
Нет данных |
|
|
||||
|
|
6187104 1012 |
|
|
ВТ 5,11 106 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
P 2,35 1014 |
|
|
|
|
|
|
|
|
|||||
|
Криптозащита |
|
|
Есть |
|
|
|
|
Нет |
|
Планируется |
|
|
||||
|
Время |
|
|
UTC (USNO) |
|
|
UTC (SU) |
|
GTC |
|
|
||||||
89

Разделение сигналов выполняется одним из двух методов:
• частотный (метод FDMA, Frequency Division Multiple Access)
используется в системе ГЛОНАСС и предполагает установление для каждого спутника своей частоты;
• кодовый (метод CDMA, Code Division Multiple Access) ис-
пользуется в системах GPS и Galileo и позволяет выполнить разделение сигналов по встраиваемым в них псевдослучайным кодам.
В системе GPS все спутники передают навигационные сигналы на несущих частотах L1 – L5, сформированных путем умножения ос-
новной частоты эталонного генератора f0 = 10,23 МГц на константы:
дослучайными последовательностямиА(ДПСП, Pseudo Random Noice –
|
L1 |
= f0 |
fL1 |
= 10,23 154 = 1575,42 МГц, |
= 19,03 см |
||
|
L2 |
= f0 |
fL 2 |
= 10,23 120 = 1227 ,60 МГц, |
|
||
|
= 24,45 см . |
||||||
|
L |
= f |
0 |
f |
L 5 |
= 10,23 115 = 1176,45 МГц |
= 25,5 см |
|
5 |
|
|
|
|
||
|
|
|
|
|
|
|
И |
Навигационные сигналы L1 и L2 модулируются бинарными псев- |
|||||||
PRN), называемыми кодами C/A и P [42].
туется как грубый (Coarse Acquisition code) или гражданский (Civil Application), легко о наруживается спутниковым приемником и используется как для идентификации спутника, так и для измерения дальностейи. Он передается на частоте L1 циклами по 1023 бита (f = 1,023 МГц) с длиной тактовой волны
Код C/A, представляющийбсобой 10-разрядный код Голда, трак-
Т = c / f = 299 742 458 / (1,023 1 000 000) = 293,0 м,
Сгде c – скорость распространения радиоволн в вакууме.
Код P, представляющ й собой бинарную псевдослучайную последовательность, трактуется как «точный» (Precision) или «защищенный» (Protected), предназначен для военных приложений и передается на частотах L1 L2 с частотой 10,23 МГц, что соответствует длине тактовой волны 29,3 м. С помощью нелинейной функции W(t) он преобразуется в Y-код (режим A/S – AntiSpoofing). Каждому спутнику соответствует свой код P, сменяемый каждую неделю, который доступен только военным пользователям, хотя некоторые спутниковые приемники могут его принимать.
90
Коды C/A и P передаются на частоте L1 в квадратурах (т.е. их математические описания соответствует функциям sin и cos, и один сигнал сдвинут относительно другого по фазе на 90 ), на частоте L2 передается только код P.
Навигационное сообщение передается с каждого спутника и включает его эфемериды, поправки к часам, параметры модели ионосферной задержки, альманах всех спутников группировки. Кроме того, оно содержит временные метки для моделирования хода часов спутника.
Информационные сообщения передаются пятью блоками по 1500 бит со скоростью 50 бит/с.
Схема получения радиосигналов GPS представлена на рис. 10.13.
|
|
|
L1 |
|
|
|
|
|
|
|
ФМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
ФМ |
|
|
|
|
|
|
|
|
|
C/A код |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
И |
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Навигационное |
|
|
|
|
|
||||||
|
Эталонныйгенератор основнойчастоты |
|
|
|
Д |
|
|
|
Антенна |
|||||
|
|
сообщение |
|
AS |
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||
|
|
P-код |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
L2 |
|
|
|
ФМ |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Рис. 10.13. Схема формирования радиосигнала GPS [42] |
|
|
|
|||||||||
|
В |
спутниках нового поколения Block |
IIR-M и |
Block IIF |
||||||||||
(см. табл. 10.2) предусмотрена передача нового сигнала на частоте L5 |
||||||||||||||
|
|
|
|
А |
|
|
|
|
|
|
|
|||
с пон женными оносферными задержками и усложненного L2C на |
||||||||||||||
частоте L2 с пон женным шумом и ослабленной многолучёвостью.
Сигналы G1 и G2 формируются от эталонного генератора основной частоты и связаны с номерами спутников k следующими зависимостями:
В с стеме ГЛОНАСС для каждого спутника установлена фик-
с рованная частота (см. |
.10.4), по которой они и различаются. |
табл |
|
Поскольку для косм ческ х аппаратов, находящихся в противопо- |
|
ложных точках орб тальной плоскости, допустимо излучение сигна- |
|
лов на одинаковых частотах, можно обойтись двенадцатью рабочими |
|
частотамиизв каждом двух диапазонов. Разделение таких сигналов в |
|
приемнике выполняется за счет пространственной и доплеровской се- |
|
лекций. |
|
91
G1 |
= 1602 + 0,5625 k, |
= 18,7 см |
|
= 1246 + 0,4375 k, |
|
G2 |
= 24,1 см |
|
Сигнал G1 модулируется кодами ВТ (высокой точности) и СТ |
||||||
(средней точности), |
а сигнал G2 – только кодом ВТ, причем код СТ |
||||||
|
|
|
|
|
|
|
И |
представляют собой 9-разрядную m-последовательность, а код ВТ – |
|||||||
псевдослучайную последовательность (см. табл. 10.4). Длина такто- |
|||||||
вой волны кода СТ равна 587 м, а кода ВТ – 58,7 м. |
|
||||||
|
Для системы Galileo выделено 10 рабочих частот и сигналов в |
||||||
диапазонах, разделяемых по кодам (метод CDMA, см. табл. 10.4). |
|||||||
|
Из этих сигналов: |
|
|
||||
|
• три снабжены криптографической защитой и используются |
||||||
либо по подписке, либо для правительственной навигации в особый |
|||||||
период; |
|
|
|
|
|
||
|
• |
|
четыре не модулированы, не содержат информации и ис- |
||||
|
|
|
|
|
|
А |
|
пользуются как пилот-сигналы в специальной аппаратуре для высоко- |
|||||||
точного позиционирования по фазе несущей; |
|
||||||
|
• |
|
три содержат навигационные сообщения, передаваемые со |
||||
скоростью 25, 125 и 500 |
/с; |
|
|||||
|
• |
|
|
бит |
|
||
|
все информативные сигналы кодируются избыточным кодом. |
||||||
|
При разра отке СНС Galileo тре ованиеДее совместимости с GPS |
||||||
достигнуто путем использования сигналов с разной кодовой структу- |
|||||||
рой, работающих в перекрывающихся диапазонах. Совместное ис- |
|||||||
пользование совпадающих сигналов на некоторых частотах уменьша- |
|||||||
ет помехи для гражданск х сигналов, излучаемых на одной несущей |
|||||||
частоте. |
|
|
|
|
|
||
|
10.3.4. Содержан е |
точность спутниковых измерений |
|||||
|
В техн ческой |
тературе наблюдения по C/A-коду обозначают- |
|||||
ся с |
|
|
|
SPS (Standard Positioning Service – стандартная служба |
|||
позиционирования), по P-коду – PPS (Precise Positioning Service – |
|||||||
служба точного позиционирования). |
|
||||||
|
мволами |
|
|
||||
|
Для измерения дальностей при спутниковых измерениях исполь- |
||||||
зуются методы, базирующиеся на использовании кодовых и фазовых |
|||||||
измерений. |
|
|
|
|
|||
|
Кодовые измерения основаны на сравнении 10-разрядных (в си- |
||||||
С |
|
|
|
|
|||
стеме GPS) или 9-разрядных (в системе ГЛОНАСС) кодов C/A (СТ) и генерируемых по одним и тем же правилам аппаратурой спутника и
92
приемника с включением временных меток [39]. Расстояние между спутником и приемником (псевдодальность) можно получить либо по времени прохождения сигнала, либо по числу кодовых последовательностей и тактов:
D = ( + ) c, |
(10.3 а) |
D = N П + (m + Ф) m , |
(10.3 б) |
|
И |
где ( + ) – время прохождения сигнала с учетом несинхронности хо- |
|
да часов спутника и приемника; c – скорость распространения радио- |
|
волн в вакууме; N, П – число кодовых последовательностей и длина кода PRN; m, Ф, m – целое число тактов, доля такта и длина тактовой волны.
Время прохождения сигнала определяется по меткам времени, содержащимся в принятой от спутника и сгенерированной приемником псевдослучайной последовательности.
Фазовые измерения основаны на определении целого числа радиоволн N, укладывающихся на расстоянии между спутником и при-
емником, и измерении фазы N. |
|
|
|
|
|||||
Тогда расстояние между спутником и приемником |
|
|
|||||||
|
|
|
|
|
|
|
Д |
(10.4) |
|
|
|
D = (N + N) + R, |
|
||||||
где – длина волны несущей частоты L1 или L2; R – суммарная по- |
|||||||||
правка, уч тывающая вл яние тропосферы, ионосферы, |
ошибок эфе- |
||||||||
|
|
|
|
А |
|
|
|||
мер д спутн ка, несовпадения хода часов спутника и приемника, ин- |
|||||||||
струментальных погрешностей, релятивистских эффектов и др. |
|
||||||||
Точность |
|
змерен |
я разностей фаз составляет около 1%, что при |
||||||
дл нах волн несущ х L1 |
|
L2 |
(G1, G2) 20 – 25 см соответствует |
||||||
|
б |
|
|
|
|||||
2,0 – 2,5 мм определяет потенциальную точность фазового метода. |
|||||||||
ложность |
спользования уравнения (2.4) заключается в том, |
||||||||
что целое число |
|
|
|
N не может быть измерено и определяется |
|||||
в процессе р а з р е ш е н |
я н е о д н о з н а ч н о с т и . Эта задача решается |
||||||||
радиоволн |
|
|
|
|
|
||||
или с использованием избыточных фазовых измерений (при приеме |
|||||||||
сигналов двухчастотным приемником), или по результатам совмест- |
|||||||||
ной обработки фазовых и кодовых измерений (при приеме сигналов |
|||||||||
одночастотным приемником) в процессе постобработки. |
|
|
|||||||
Погрешности спутниковых измерений обусловлены динамиче- |
|||||||||
С |
|
|
|
|
|
|
|
|
|
ским характером системы в целом, нестабильностью взаимного по-
93
ложения ее элементов и условиями прохождения сигнала. Точность позиционирования определяется значением геометрического фактора, зависящего от числа и размещения спутников, и качества навигационного сигнала.
Геометрический фактор (ГФ) представляет собой количественную оценку схемы взаимного расположения наблюдаемых спутников и устанавливается по эфемеридам этих спутников на момент наблюдений. Приведем значения ГФ, используя английские аббревиатуры их названий [42]:
GDOP = Q11 + Q22 + Q33 + Q44 |
, |
|
||||
PDOP = Q11 + Q22 + Q33 , |
|
VDOP = |
Q33 |
, , |
(10.5) |
|
HDOP = Q11 + Q22 |
|
TDOP = |
|
|
|
|
, |
Q44 |
|
|
|||
|
|
|
|
|
|
|
где DOP (Dilution of Precision) означает «уменьшение точности», а |
|
первые буквы подсказывают, точность какого именно неизвестного |
|
уменьшается: G – всех составляющих (Geometrical),ИP – в простран- |
|
стве (Position), H – в плане (Horizontal), V – по высоте (Vertical), T – |
|
во временных задержках (Time). |
Д |
|
|
Чем больше значение ГФ, тем хуже точность, для ее повышения |
|
необходимо увеличить число наблюдаемых спутников. Основным является фактор PDOP, для которого приняты следующие вербальные
оценки: 4 – хорошо; 5–7 – удовлетворительно; |
7 – плохо. |
||||||
|
Качество навигационного сигнала зависит от условий его про- |
||||||
хождения через тропосферу и ионосферу, точности содержащейся в |
|||||||
нем нформац , релят в стскихАэффектов и пр. (табл. 10.5). |
|||||||
|
|
|
|
|
|
Таблица 10.5 [8] |
|
|
Источн погрешностей |
|
определения дальности по коду, м |
|
|||
|
P |
|
|
C/A |
|
||
|
|
|
|
|
|
||
|
|
Ошибка |
|
|
|
|
|
|
Прогноз эфемер д |
3,5 |
|
3,5 |
|
||
|
|
|
|
|
|
||
|
Эталон времени спутн ка |
1,7 |
|
1,7 |
|
||
|
Ионосферная рефракция |
1,0 |
|
4,0 |
|
||
|
|
|
|
|
|
|
|
|
Тропосферная |
|
0,5 |
|
0,5 |
|
|
|
рефракция |
|
|
|
|
||
|
Многолучевость |
1,0 |
|
1,0 |
|
||
|
|
|
|
|
|
||
|
Аппаратура потребителя |
1,08 |
|
10,8 |
|
||
|
|
|
|
|
|
||
|
уммарная погрешность |
4,31 |
|
12,21 |
|
||
С |
|
|
|
|
|
|
|
94
Ионосферная рефракция является следствием изменения коэффициента ее преломления и учитывается по данным измерений на двух
частотах.
Z |
|
Прогноз эфемерид. Эта погреш- |
|||||
|
ность связана с неточностью исполь- |
||||||
|
|
|
|
|
|
||
A |
|
зуемой модели геопотенциала Земли, |
|||||
|
|
|
rA |
|
|||
|
|
|
|
в частности, влияния гравитационно- |
|||
|
|
|
|
S |
|
||
|
RA |
|
|||||
|
|
|
|
|
го поля, солнечного давления, движе- |
||
|
|
|
RS |
|
|
||
O |
Y |
||||||
|
|
ния полюсов Земли и пр. |
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
Эталон времени спутника. По- |
|
X |
|
грешность возникает из-за сдвига ча- |
|||||
|
|
|
|
|
|
стот бортового эталона времени под |
|
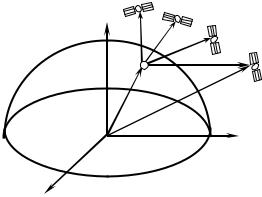
Рис. 10.14. Схема абсолютного |
|
влиянием релятивистского и грави- |
|||||
позиционирования |
|
тационного эффектов. |
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
Д |
|
Тропосферная рефракция возникает из-за непостоянства коэффи- |
||
|
А |
|
циента преломления при изменении высоты. |
||
Многолучевость распространения сигнала зависит от взаимного |
||
расположения спутника, отражающей поверхности и размещения по- |
||
требителя. Эта погрешность не поддается прогнозированию, и в табл. |
||
потребителя |
|
|
10.5 дано ее примерное значение. |
|
|
Аппаратура |
|
вносит погрешности, вызванные |
преимущественно шумом приемника, погрешностями определения |
||
параметров антенны, недостаточной точностью программной обра- |
||
междувекторами, определяющими положение наблюдателя RA, спутника RS и псевдодальностью rA и ее искажением r (рис. 10.14):
ботки и др.
Методы поз ц он рования. В специальной литературе под абсолютным поз ц он рованием понимают определение координат пункта, то есть ра оту в кодовом навигационном режиме, а под отно- с тельным – определен е местоположения одного пункта относи-
СПространственное положение спутника в момент наблюдений RS вычисляют с использованием принятой модели его движения и данных навигационных сообщений, а дальности rA – по формулам (10.3).
тельно другого − твердого, сходного пункта.
Абсолютное поз ц он рование предполагает определение геоцентр ческ х X, Y, Z ли геодезических B, L, H координат фазового центра спутникового приемника на основе следующей зависимости
RA = RS − rA + r .
95
Искомый вектор RA находят из реше-
KA1 |
KA3 |
ния четырех нормальных уравнений, |
||||
|
||||||
|
|
|
|
|
||
|
KA2 |
связывающих |
поправки |
к прибли- |
||
|
KA4 |
|||||
|
женным координатам определяемой |
|||||
|
|
|||||
|
|
точки и к часам приемника. |
|
|||
|
|
|
И |
|||
|
|
Чаще всего точность абсолют- |
||||
|
|
ного позиционирования |
для |
целей |
||
|
|
навигации оказывается |
недостаточ- |
|||
|
|
ной, и для ее повышения используют |
||||
ОП-1 |
ОП-2 |
дифференциальные подсистемы. |
||||
|
|
Д |
|
|
||
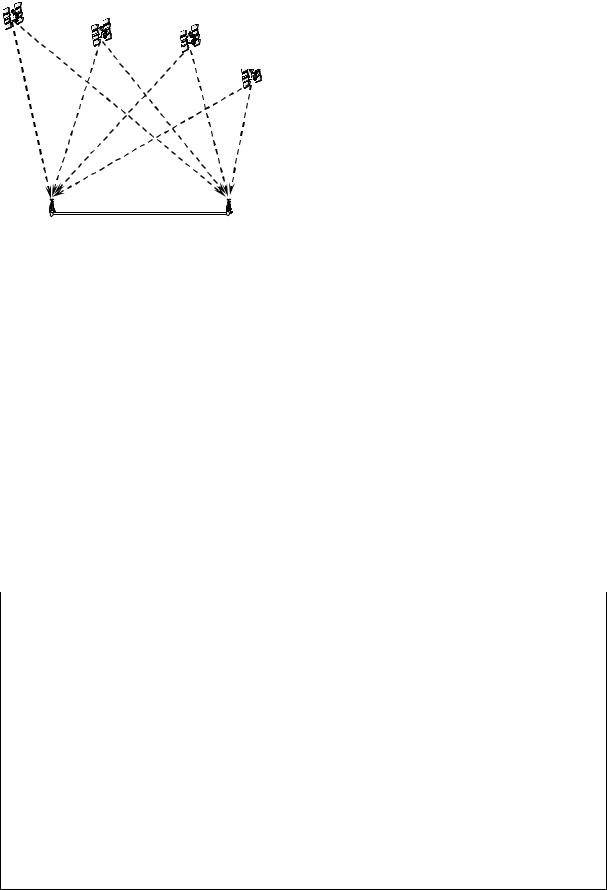
Рис. 10.15. Схема размещения |
Относительное позициониро- |
|||||
вание считается наиболее точным и |
||||||
пунктов при относительном |
||||||
предполагает |
использование |
двух |
||||
|
позиционировании |
|||||
|
синхронно работающих приемников |
|||||
|
|
|||||
(рис. 10.15), один из которых установлен на опорном пункте ОП-1 и
рой – над определяемой точкой ОП-2 и называется ровером (rover).
называется базовым или референцнымА(base or reference station), а вто-
При обработке результатов измерений формируются пространственные
векторы, определяющие положение ровера относительно базового |
|
б |
-6 |
пункта; применение специальных приемов позволяет компенсировать |
|
наиболее значимые погрешности измеренных дальностей и уменьшить влияние остальных источников оши ок до приемлемых пределов.
|
Для целей навигации по понятным причинам используются |
|||||
|
и |
|
|
|
||
|
только кинематические режимы измерений (с подвижным ровером), |
|||||
|
общая характер |
ст ка которых представлена в табл. 10.6. |
||||
|
|
|
|
|
|
Таблица 10.6 |
|
Реж м |
|
|
Характеристики |
|
Точность*, мм |
|
|
|
Определение положения точек при |
|
||
|
К немат ка |
|
перемещении ровера (в движении или |
(10 20 + 2 10 D) |
||
|
|
|
с коротк ми остановками) |
|
|
|
|
|
|
|
|
||
|
тойди |
|
Одноминутные остановки на опре- |
(5 + 1 10-6D) |
||
|
|
деляемых пунктах |
|
|||
|
|
|
|
|
||
|
|
|
|
|
||
|
|
|
Постоянная связь с базовой станци- |
|
||
|
RTK |
|
ей по радиомодему и определение ко- |
(5 + 1 10-6D) |
||
|
|
|
ординат в реальном масштабе времени |
|
||
|
|
|
|
|
|
|
|
OTF |
|
Определение координат |
центров |
|
|
|
|
фотографирования в полете |
двухча- |
100 − 150 |
||
|
(на – лету) |
|
||||
|
|
стотным приемником |
|
|
||
С |
|
|
|
|||
|
|
|
|
|
|
|
Примечание: * D – расстояние между базовым и определяемым пунктами.
96
Режим кинематики имеет ряд разновидностей:
•стой – иди (Stop and Go) с короткими остановками на определяемых точках, координаты которых определяются при постобработке;
•кинематики в реальном времени (Real Time Kinematics – RTK), предполагает оснащение приемников радиомодемамиИи определение координат точек установки ровера в течение нескольких секунд с учетом поправок, полученных по радиомодему с базовой станции;
•OTF (On The Fly – на лету), используется для определения координат движущихся объектов (самолетовД, автомобилей и др.) при помощи непрерывного приема сигналов двухчастотным приемником.
Одновременное наблюдение спутников ГЛОНАСС и GPS позволяет повысить точность позиционированияАи сократить время измерений.б
и |
Для |
обеспечения соответствую- |
||
|
||||
С |
щих работ в зависимости от их точно- |
|||
сти и размера территории может ис- |
||||
|
||||
|
пользоваться либо одиночная станция, |
|||
|
либо несколько объединенных в сеть |
|||
|
станций. |
|
|
|
|
Одиночная станция может быть |
|||
|
постоянной или временной и включа- |
|||
|
ет автономно работающий двухча- |
|||
|
стотный |
спутниковый |
приемник, |
|
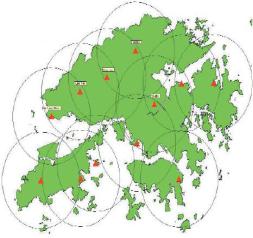
Рис. 10.16. Сеть постоянно |
двухчастотную антенну |
и средства |
||
работающих базовых станций |
связи. Управление работой приемника |
|||
осуществляется компьютером, расположенным рядом с приемником или на удалении от него.
97
«Сырые» (необработанные) результаты кодовых или фазовых спутниковых измерений, получаемые приемником ГНСС, передаются в память компьютера и записываются в файлы определенной длины и с помощью специализированного программного обеспечения передаются по каналам связи на FTP-сервер для обеспечения пользователям простого к ним доступа через Интернет. Одновременно с помощью этих программ выполняется обработка данных приемника ГНСС и расчет дифференциальных поправок, которые могут передаваться удаленному на расстояние до 300 км пользователю по радиоканалам, высокоскоростным беспроводным сетям (GSM, GPRS, CDMA и др.) или через Интернет [32].
Точность позиционирования по этой схеме заметно падает с увеличением расстояния до базовой станции, и сантиметровая точность определения координат в режиме реального времени RTK достигается лишь на удалениях, не превышающих 20–30 км [17], а
субметровая – на удалениях до 200 км [45]. |
И |
|||
|
|
|
|
|
Сеть базовых станций является, как правило, стационарной и |
||||
включает 5, 10, 20 и более подключенных к серверу по каналам связи |
||||
спутниковых приемников, каждый из которых работает автономно и |
||||
вне зависимости от других. В этом случае сантиметровая точность |
||||
позиционирования может |
достигнута на значительной террито- |
|||
|
|
|
Д |
|
рии (см. рис. 10.16). |
|
|
|
|
Такая сеть в ольшинстве случаев более эффективна по сравне- |
||||
нию с традиционными триангуляционными и полигонометрическими |
||||
построен |
, поскольку станции могут быть установлены в любом |
|||
|
|
А |
|
|
месте, вне зав с мости от условий видимости между ними, геометрия |
||||
сети не является столь кр т чной, а точность выше и более стабильна. |
||||
Все базовые станц |
по каналам связи (телефонным провод- |
|||
ным л н ям, |
компьютерной сети, сотовой связи или по сети Интер- |
|||
|
быть |
|
|
|
нет) связываются с сервером стационарного вычислительного цен- |
||||
Стра. ямиУстановленное на сервере специализированное программное обеспечение осуществляет управление всеми базовыми станциями сети, загрузкой файлов спутниковых данных приемников в память сервера через регулярные промежутки времени, расчет дифференциальных поправок и пр. [32].
Концепция виртуальной базовой станции (VRS – Virtual Reference Station), являющейся логическим продолжением рассмотренных выше технологий и объединяющей большую зону покрытия с небольшим ко-
98

личеством базовых станций, по сути, является дальнейшим развитием технологии ДПС OmniSTAR и сводится к следующему [5, 45]:
1)данные референцных станций сети непрерывно передаются в вычислительный центр, где выполняется разрешение фазовых неод-
нозначностей для базовых линий сети, сравнение полученных из мгновенных решений координат с известными координатамиИи формирование невязок;
2)используя математический аппарат фильтра Калмана (4.2), выполняется построение линейной или более сложной модели оши-
бок, необходимой для прогнозирования вероятных ошибок в положении базовых станций; Д
3)по навигационным координатам пользователя и поступающим с его приемника результатам измерений выполняются:А
|
реально существующей |
азовой станцией и приемником пользователя. |
|||
|
приёмни |
|
|
||
|
Решаемые с помощью одиночных базовых станций, реальной |
||||
|
или виртуальной сети задачи зависят от возможностей используемого |
||||
|
программного о еспечен я. |
||||
|
|
|
|
Таблица 10.7 |
|
|
Программа |
|
|
Основные функции программы |
|
|
|
Обслуж ван е од ночной станции. Запись в компьютер данных базо- |
|
||
|
GPSBase |
вой станцбдля постобработки, расчет и передача поправок RTK- |
|
||
|
сант метровой точности при удалениях до 20 км и поправок DGPS- |
|
|||
|
|
|
|||
|
|
субметровой точности при удалениях до 200 км |
|
||
|
|
|
|
||
|
|
Обслуживание сети базовых станций. Связь с удалёнными базовыми |
|
||
|
|
GPS- |
ками, контроль целостности системы и качества, анализ |
|
|
|
GPSNet |
поступающих данных с оценкой многолучёвости, определение срывов |
|
||
|
слежения за фазой несущей и её восстановление, расчет и передача |
|
|||
|
|
|
|||
|
|
дифференциальных поправок для мобильного пользователя от ближай- |
|
||
|
|
шей к нему базовой станции |
|
||
|
|
|
|
||
СRTKNet |
Технология VRS (три и более базовых станции). Обработка данных |
|
|||
всех станций сети, построение модели ошибок, расчет поправок с точ- |
|
||||
ностью от 0,02 – 0,03 м до 1,0 – 3,0 м для режимов DGPS и RTK, реали- |
|
||||
|
|
|
|||
|
|
зации инициализации OTF |
|
||
|
|
|
|
|
|
99