

- •ПРЕДИСЛОВИЕ
- •Глава 9. МЕТОДЫ ЦИФРОВОЙ ФОТОГРАММЕТРИИ
- •9.1. Понятие о цифровом изображении
- •9.2. Характеристики цифрового изображения
- •9.4. Источники цифровых изображений
- •9.5. Стереоскопические наблюдения и измерения цифровых изображений
- •9.7.1. Внутреннее ориентирование снимков
- •9.8.1. Способы представления цифровой модели рельефа
- •9.9. Ортотрансформирование снимков
- •9.10.4. Создание цифровых трансформированных изображений
- •9.10.5. Создание цифровых фотопланов
- •Глава 10. МЕТОДЫ ИНЕРЦИАЛЬНОЙ И СПУТНИКОВОЙ НАВИГАЦИИ
- •10.2. Инерциальные навигационные системы
- •10.2.1. Общие принципы инерциальной навигации
- •10.2.4. Обработка инерциальных данных
- •10.3. Спутниковые навигационные системы
- •10.3.1. Действующие и разрабатываемые СНС
- •10.3.2. Основные компоненты СНС
- •10.3.3. Навигационные сигналы GPS, ГЛОНАСС и Galileo
- •10.4. Интеграция инерциальных и спутниковых систем
- •10.4.1. Достоинства и недостатки навигационных систем
- •10.4.2. Фильтр Калмана
- •10.4.3. Элементы модели интеграции ИНС и СНС
- •Глава 11. МЕТОД АЭРОГЕОДЕЗИЧЕСКИХ РАБОТ НА ОСНОВЕ ВОЗДУШНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ И ЦИФРОВОЙ АЭРОФОТОСЪЁМКИ
- •11.2.1. Установка и наладка оборудования на борту летательного аппарата
- •11.2.2. Геодезическое обеспечение аэросъемочных работ
- •11.2.3. Производство измерений на борту летательного аппарата
- •11.2.7. Тематическая обработка
- •11.2.8. Обработка цифровых фотоснимков
- •11.3. Программный комплекс ALTEXIS
- •11.4. Основные возможности воздушных сканеров ALTM
- •11.5. Инструментальные средства лазерной локации
- •11.5.2. Методы выполнения развертки
- •Глава 12. СИСТЕМЫ НАЗЕМНОГО МОБИЛЬНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
- •12.1. Особенности и преимущества наземных мобильных систем
- •12.3. Процесс съемки и получаемый результат
- •12.4. Испытание системы StreetMapper
- •Глава 13. ГЕОИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ ТЕРРИТОРИИ ГОРОДА
- •14.1. Обзор информации о БПЛА
- •Библиографический список
Глава 13. ГЕОИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ ТЕРРИТОРИИ ГОРОДА
Технологическое отставание России от передовых стран в области современного использования геопространственной информации является одним из серьёзных препятствий для динамичного развития страны, что заставляет искать пути и способы выхода из данного кризиса. На проблему плохой обеспеченности городов картографической и градостроительной документацией начинают обращать внимание. Так, в новой редакции Градостроительного кодекса появились статьи, не допускающие финансирование градостроительной деятельности на территориях, не обеспеченных актуальными генеральными планами. В связи с этим во многих субъектах Российской Федерации приняты собственные программы, предусматривающие обновление картогра-
Одной из первоочередных задач ХХI в. в РоссииИявляется современное геоинформационное обеспечение территорий городов, ко-
фической основы и градостроительной документации.
Динамичное развитие территорииДостро нуждается во всё более точных картографических продуктах. Возникает парадоксальная ситуация, когда стоимость создания таких материалов растёт по мере
торое включает создание единого координатно-временного пространства и современной цифровой картографической основы.
повышения точности, а время, в течение которого их можно считать |
||||
достоверными, катастрофически сокращается. Современные дости- |
||||
жен я в области д станц онного зондирования, спутниковых навига- |
||||
|
|
|
|
А |
ц онных |
технолог й |
|
оперативной цифровой обработки геопро- |
|
странственной нформац |
позволяют выйти из тупика классических |
|||
технолог |
й. |
б |
||
|
|
|||
Точная, актуальная, ш рокого спектра информация о местности, |
||||
регионального |
|
|||
С |
|
|
|
|
операт вно предоставленная потребителю в цифровой форме, позво- |
||||
ляет качественно новом уровне обоснованно использовать её в си- |
||||
стемах |
|
|
и государственного управления, а также эф- |
|
фективно вести бизнес. |
|
|
||
Комплекс аэрофотогеодезических и картографических работ для современного геоинформационного обеспечения территории города включает следующее:
1) создание единого поля координатно-временной информа-
ции на территории города и его окрестностей с целью согласованной увязки и решения различных задач необходимого комплекса работ;
170
2)аэрофотосъемку и лазерное сканирование городской территории со спутниковой навигацией и определением элементов внешнего ориентирования для создания современного цифрового картографического материала в средних и крупных масштабах, а также для целей реального 3D-моделирования объектов городской инфраструктуры;
3)создание цифрового планово-картографическогоИматериалаформационного обеспечения, так и приДвыполнении строительных,
планировочных, геодезических, топографических, кадастровых, землеустроительных, маркшейдерских и управленческих работ, а также высокоточной навигации и диспетчеризации необходимо создать единое поле координатно-временной информации.
С этой целью на городской территории создаётся сеть, как пра-
вило, |
постоянно |
действующих |
референцных |
спутниковых |
|
GPS/ГЛОНАСС-станций с таким расчетом, чтобы точность спутнико- |
|||||
вых определен й местоположения на любом локальном участке обес- |
|||||
|
|
|
А |
|
|
печ вала необход мую геодезическую точность определения коорди- |
|||||
нат. Кроме того, о еспеч вала для лю ой части городской территории |
|||||
съёмку на более крупного |
1:500 в режиме RTK и удовле- |
||||
творяла требован ям комплексного решения жизненно необходимых |
|||||
|
|
масштаба |
|
|
|
задач терр тори . |
|
|
|
||
Целевое назначен е с стемы референцных станций: |
|||||
• создание единого поля координатно-временной информации; |
|||||
установление• границ административно-территориальных об- |
|||||
разований; |
|
|
|
|
|
• |
геодезическое |
обеспечение |
строительства в |
реальном мас- |
|
штабе времени; |
|
|
|
|
|
• решение задач высокоточной навигации и диспетчеризации |
|||||
С |
|
|
|
|
|
наземных, речных и воздушных транспортных средств; |
|
||||
171
•координатно-временное обеспечение поисково-спасательных работ служб МЧС, скорой помощи, ГИБДД и др.;
•определение координат пунктов ГГС, центров фотографирования фотоснимков, опорных межевых сетей, поворотных точек границ участков;
•геодезическое обеспечение управлением строительнымиИмашинами в реальном масштабе времени.
Современная геодезическая основа города создаётся по спутниковой технологии в местной системе координат, установленной стро-
го относительно Государственной геодезической системы координат (ГСК-95), что регламентируется постановлениямиДПравительства Российской Федерации.
Для создания такой сети и установления местной системы коор-
динат (МСК) необходимо выдержать следующие основополагающие условия: Аб
Смасштабные съёмки терр тории города, одновременно с этим необход мо обеспеч ть высокую однородную точность городской геоде- з ческой сети для всего комплекса задач.
геодезиче− главным услов ем является необходимость сохранения городской с стемы коорд нат, в которой ранее были выполнены крупно-
Геодез ческая пр вязка сети базовых станций осуществляется в два этапа. На первом этапе выполняется привязка всех пунктов спутниковой ской сети к общеземной системе координат WGS84. На втором этапе определяются координаты базовых станций и нивелирных пунктов в ГСК-95 и Балтийской системе высот.
Например, в г. Омске создана сеть из пяти базовых станций (рис. 13.1). Базовая станция ВИСХАГИ определена из пятисуточных сеансов наблюдений относительно пяти постоянно действующих пунктов мировой геодезической сети с использованием точных эфе-
172

мерид. В результате уравнивания сети получены координаты базовой станции в WGS-84 с точностью 3 см в плане и 10 см по высоте. Определение координат остальных базовых станций в WGS-84 было выполнено уравниванием от базовой станции ВИСХАГИ.
|
И |
Д |
|
А |
|
Р с. 13.1. Схема сети азовых станций города |
|
СсеансамиПосле пр бвязки спутн ковой геодезической сети к общеземной с стеме коорд нат определяются координаты в государственной си-
стеме коорд нат 1995 г. Для этого выполняются спутниковые измере- н я сетевым методом от пунктов государственной геодезической сети. На пунктах ГГС выполнялись синхронные спутниковые наблюдения четырьмя с изменением высот антенн между сеансами. Длительность одного сеанса спутниковых наблюдений составляет 4 ч.
На нивелирных пунктах выполняются синхронные спутниковые наблюдения двумя сеансами с изменением высот антенн между сеансами. Длительность одного сеанса спутниковых наблюдений также составляет 4 ч.
173

Весь комплекс полевых и камеральных геодезических работ по определению координат базовых станций в системе координат ГСК95 и Балтийской системе высот 1977 г. завершается уравниванием
всей сети и оценкой точности. Точность получения координат базо- |
|||||||||
вых станций в г. Омске не превысила 1 см в плане и 3 см по высоте |
|||||||||
относительно пунктов ГГС. |
|
И |
|||||||
|
|
|
|||||||
|
Координаты спутнико- |
|
|
|
|||||
вых референцных станций в |
|
|
|
||||||
замкнутой сети (см. рис. |
|
|
|
||||||
13.1) |
определяются |
двухча- |
72о |
|
75о |
||||
стотными |
геодезическими |
Д |
|||||||
|
|
|
|||||||
спутниковыми приемниками |
|
|
|
||||||
методом |
относительных |
из- |
|
|
|
||||
мерений в статическом ре- |
|
|
|
||||||
жиме относительно пунктов |
|
|
|
||||||
|
|
|
|
|
|
А |
|
|
|
триангуляции I, II, классов, |
|
|
|
||||||
расположенных равномерно |
|
|
|
||||||
по периметру всей площади, |
|
|
|
||||||
и ближайшей периферии об- |
|
|
|
||||||
|
|
|
б |
|
|
|
|||
служиваемой территории. |
|
|
|
|
|||||
|
Базовые |
станции |
за- |
Рис. 13.2. Схема расположения |
|||||
крепляются в |
местах |
с |
от- |
координатных зон в МСК-55 |
|||||
крытым |
горизонтом |
не а |
|
|
|
||||
|
искажает |
|
|
|
|
||||
(например, на крышах капи- |
|
|
|
||||||
тальных малоэтажных здан й, сооружений). Первые базовые станции |
|||||||||
в городе созданы |
действуют в настоящее время. |
Однако ведом- |
|||||||
ственные базовые станц |
не о ъединены в единую сеть и нет едино- |
||||||||
го выч сл тельного центра с необходимым программным обеспече- |
|||||||||
С |
|
|
|
|
|
|
|
||
н ем |
средствами связи для обработки в реальном масштабе времени |
||||||||
для обслуж ван я вышеперечисленного многоцелевого спектра |
|||||||||
назначен |
я. |
|
|
|
|
|
|
|
|
|
Для города устанавливается такая система координат, которая |
||||||||
минимально |
|
|
реальную площадь города. Так, если взять си- |
||||||
стему координат МСК-55, то г. Омск находится в ней на стыке двух 3о координатных зон (рис. 13.2), поэтому искажения площадей в этом случае максимальные. Минимальными искажения будут только в том случае, когда центр города будет максимально приближен к новому осевому меридиану 73,5о (рис. 13.3), что легло в основу системы координат МСК-Омск-2008.
174

|
|
|
|
|
Кроме того, площади участков |
|||||
|
|
|
|
на картах и планах отличаются от ре- |
||||||
|
73,5 |
|
|
альных |
площадей |
на |
земле |
тем |
||
|
|
|
больше, чем больше уровень поверх- |
|||||||
|
|
|
|
|||||||
|
|
|
|
ности относимости отстоит от сред- |
||||||
|
|
|
|
|
|
|
И |
|||
|
|
|
|
ней высоты (высотной отметки) тер- |
||||||
|
|
|
|
ритории города. С этой целью для |
||||||
|
|
|
|
города оптимизирован уровень по- |
||||||
|
|
|
|
верхности относимости (рис. 13.4). |
||||||
|
|
|
|
|
Для реализации главного усло- |
|||||
|
|
|
|
|
Д |
|
|
|
||
|
|
|
|
вия |
установления |
местной |
системы |
|||
|
|
|
|
координат города необходимо мини- |
||||||
|
|
|
|
мизировать расхождения |
координат |
|||||
|
|
|
|
между вновь установленной город- |
||||||
Рис.13.3. Схема расположения |
ской |
системой координат |
и старой |
|||||||
осевого меридиана зоны |
А |
|
|
|
|
|||||
в МСК-Омск-2008 |
|
системой координат города, что осу- |
||||||||
|
|
|
|
ществляется путём оптимизации па- |
||||||
раметров преобразования относительно ГСК-95, то есть опытным пу- |
||||||||||
тём подбирается осевой меридиан и поверхность относимости. |
|
|||||||||
|
б |
|
|
|
|
|
|
|||
Подбор параметров осуществляется с таким расчетом, чтобы |
||||||||||
|
|
|
|
|
максимальные расхождения ко- |
|||||
Изменение |
|
|
|
|
ординат контрольных |
пунктов |
||||
поверхности |
|
|
|
|
геодезической |
сети, |
располо- |
|||
относимости |
|
|
|
|
||||||
поверхности |
|
|
|
|
|
|
|
|
||
|
МСК-Омск-2008 |
женных на максимальном уда- |
||||||||
|
|
|
|
|
лении от исходного пункта (в |
|||||
|
|
МСК-55 |
|
пределах городской черты), не |
||||||
|
|
|
|
|
превышали предельной графи- |
|||||
НАСС |
|
|
|
|
ческой точности плана масшта- |
|||||
|
|
|
|
ба 1:500. По установленным па- |
||||||
|
|
|
|
|
||||||
|
|
|
|
|
раметрам (ключам) перехода от |
|||||
|
|
|
|
|
системы ГСК-95 к МСК вычис- |
|||||
Рис.13.4. Изменение площади в связи с |
ляются координаты пунктов го- |
|||||||||
изменением |
|
относимости |
родской геодезической сети и |
|||||||
|
|
|
|
|
опорной межевой сети. |
|
|
|||
В п.1.2 Руководства по созданию и реконструкции городских |
||||||||||
геодезических сетей |
с использованием |
спутниковых систем |
ГЛО- |
|||||||
/GPS, ГКИНТ (ОНТА – 01 – 271 – 03) изложены цели рекон- |
||||||||||
струкции городских геодезических сетей. Цели реконструкции город- |
||||||||||
ских геодезических |
сетей: повышение |
точности |
сети, |
надёжности |
||||||
175
определения параметров преобразования между геодезической общеземной координатной системой, государственной и городской геодезическими системами координат, а также возможность формировать каталоги координат пунктов во всех используемых в городе коорди-
натных системах. |
И |
|
|
Сеть постоянно действующих спутниковых базовых станций |
|
обеспечивает многоцелевое использование сети различных городских служб, в том числе для работы в режиме RTK. Режим RTK позволяет в реальном масштабе времени с высокой точностью осуществлять координирование, вынос проектов в натуру и съёмку для различного целевого назначения, в том числе создать геодезическое обеспечение управлением современными строительными машинами.
ниям проекта. GPS+ГЛОН СС-приемникД, например 9901/9902, обеспечивает определение координат двух антенн GPS+, например, закрепленных на корпусе экскаватора, для последующего их пересчета
Новейшая система управления строительной техникой, используя базовые станции в режиме RTK, обеспечивает оператора всей необходимой информацией о положении машины при выполнении любых земляных работ. В отличие от лазерных систем управления, например экскаваторами, 3D-система позволяет оператору видеть точное положение своей машины на рабочем объекте в пространстве с точной координатной привязкой к характерным линиям и направле-
на режущую кромку ковша. Приёмник имеет защищенный от вибра-
ции корпус с |
|
креплениями и встроенный радиомодем |
для работы в реж ме RTK с сантиметровой точностью. |
||
|
А |
|
|
б |
|
магнитными |
|
|
13.2. Аэрофотосъемка со спутниковой навигацией лазерным скан рованием городской территории
САэросъемка городов, как правило, выполняется с целью оптимизац затрат (цена – качество) при создании и обновлении топографических планов крупных масштабов и ближних к ним средних по масштабному ряду карт. Съёмка наземными геодезическими методами больших территорий в крупных масштабах требует в 1,5–2 раза больших затрат, средств и времени по сравнению с современными аэрофотогеодезическими методами.
Аэросъемка выполняется современными аэросъемочными системами, например на базе аэрофотоаппарата RC-30 (фирма Leica, Швейцария, рис. 13.5) со спутниковой навигацией и спутниковыми
176

определениями координат центров фотографирования с использованием двухчастотных приемников 9500 фирмы Leica или цифровыми камерами с определением всех шести элементов внешнего ориентирования интегрированной системой прямого геопозиционирования
GPS/IMU. |
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
На рис. 13.5 показаны: |
||
|
|
|
• |
Компьютер |
с монитором и |
|
|
|
визуализацией проекта АФС. |
||
|
|
|
• Визир, одна из функций кото- |
||
|
|
|
рого позволяет реализовать компенса- |
||
|
|
|
цию линейного сдвига изображения, |
||
|
|
|
вызванного скоростью носителя. |
||
|
|
|
• |
АФА с |
гироскопической |
|
|
|
установкой, с помощью которой осу- |
||
|
|
А |
|
||
Рис. 13.5. Аэрофотосъёмочный |
ществляется горизонтирование сним- |
||||
комплекс RC-30 |
|
ков и компенсация угловых сдвигов |
|||
|
|
|
изображения. |
|
|
Аэрофотоаппарат RC-30 имеет высококачественную оптику с |
|||||
дисторсией не |
3 мкм и с разрешением по всему полю изобра- |
||||
|
более |
|
|
||
жения более 100 лин/мм, компенсациюДлинейного и угловых сдвигов изображения. Качество материалов аэрофотосъемки позволяет обра-
батывать аэрофотоснимки с коэффициентами увеличения R = 8–10 крат, что значительно уменьшает количество обрабатываемых сним-
ков (стереопар) |
по сравнению с традиционной аэрофотосъёмкой |
||
(R<2–4). Отсюда сокращен е затрат и более производительное вы- |
|||
полнен е комплекса ра от с заданной точностью в соответствии с |
|||
требован ями «Инструкц |
по фотограмметрическим работам при |
||
создан |
ц фровых топографических карт и планов, ГКИНП (ГНТА)- |
||
02-036-02, Москва, ЦНИИГАиК, 2002». Инструкция подготовлена с |
|||
учётом дост жен й науки |
техники в области фотограмметрии. В |
||
новой |
нструкц |
регламентировано создание топографических карт |
|
и планов масштабов от 1:25 000 до 1:500 по материалам аэрофото- |
|||
съёмки в |
форме с использованием аналитических и цифро- |
||
цифровой |
|
||
вых фотограмметрических приборов. |
|||
СДвухчастотные приемники и программы обработки обеспечивают необходимую точность координат центров фотографирования, которые являются геодезическим съемочным обоснованием, полученным практически одновременно с материалами аэрофотосъемки. Это значитель-
177
но сокращает объем полевых геодезических работ по созданию съемочного обоснования и сроки выпуска готовой продукции.
Спутниковая навигация в реальном масштабе времени позволяет высококачественно выполнять аэрофотосъемку по компьютерной
технологии и заданному проекту, то есть практически получать фото- И
графии в заданных координатах и надежно контролировать во время фотосъемки положение носителя.
Одним из современных методов сбора и обработки данных о местоположении объектов и рельефе местности, а также их качественных и количественных характеристиках является метод на основе ла-
• Инерциальная система. На основанииДданных этой подсистемы можно вычислить параметры ориентации летательного аппарата (датчиков инерциальной системы, лазерного сканера и фотоаппарата)
зерной локации и цифровой аэрофотосъёмки.
В основе технологии лежит выполнение синхронного маршрутного лазерно-локационного сканирования местности и цифровой
аэрофотосъемки в составе следующего комплекта оборудования:
• |
А |
Лазерный сканер. На основании данных этой подсистемы |
можно вычислить расстояние между излучателем и объектом отражения, а также угол (фазу) в плоскости сканирования, куда был направлен луч в момент излучения.
относительно определенной системы координат.
• GPS-приемник. |
На основе его данных осуществляется син- |
||
хронизация времени ра оты всех подсистем, а также вводится единая |
|||
с стема коорд нат |
совместно с данными инерциальной системы |
||
рассч тывается траектор |
я полета летательного аппарата. |
||
Для определен |
я траектории летательного аппарата и уточнения |
||
угловых данных нерц альной системы применяется метод совмест- |
|||
ной обработки GPS-данных и данных инерциальной системы. Приме- |
|||
б |
|||
нен е такого метода расчета повышает как точность определения |
|||
угловых параметров, так |
координат местоположения сканера. |
||
Кроме прибора, выполняющего лазерно-локационное сканиро- |
|||
ваниеместности, на борту |
летательного аппарата устанавливается |
||
цифровая фотокамера |
для |
получения цветных аэрофотоснимков |
|
С(рис. 13.6). Поскольку в состав комплекса, выполняющего лазернолокационную съемку и цифровое картографирование, входит инерциальная подсистема, то геодезическая привязка фотографий осуществляется программным способом автоматически, учитывая траекторию полёта и угловую ориентацию фотоаппарата и летательного аппарата
178

в момент экспозиции снимка. То есть в конечном счёте вычисляются линейные X, Y, Z и угловые , , элементы внешнего ориентирования снимка, необходимые для трансформирования изображений в заданный масштаб.
|
|
|
Д |
|
|
США |
|
||
Рис. 13.6. Фрагмент цифрового |
|
Рис. 13.7. Фрагмент лазерного |
||
|
|
И |
||
аэрофотоснимка |
|
сканирования. Цвет зависит от высоты |
||
б |
|
|
|
|
В передовых странах, например |
|
, проекты аэрофотосъёмки |
||
с одновременным получением данных |
с помощью лидара становятся |
|||
общепринятой практикой. Россия занимает третье место в мире по |
||||
объёму рынка услуг воздушного лазерного сканирования, а также по |
||||
количеству сканеров.
Лазерное сканирование как средство получения цифровых моделей рельефа для аэрогеодезического производства является наиболее быстро разв вающейся о ластью приложения.
13.3. Создан е планово-картографического материала
|
|
мониторинг |
Технолог ческ е л н |
и аэрофотогеодезического производства в |
|
современных предприятиях базируются на методах цифрового карто- |
||
графирования, нап |
ер: |
технологическая линия отечественного |
рим |
|
|
производства (программные продукты PHOTOMOD, ПАНОРАМА), |
||
зарубежная технологическая линия США фирмы INTERGRAPH. В |
||
технологиях крупномасштабного картографирования используются |
||
материалы аэрофотосъёмки и спутниковая геодезическая привязка |
||
аэрофотоснимков. Для выпуска векторных планов масштабов 1:500 и |
||
С |
|
|
179

1:1000, как правило, осуществляется стереовекторизация дешифрированных контуров на цифровых фотограмметрических станциях.
Одним из важнейших направлений эффективного экономического развития города является рациональная организация территории, которая невозможна без наличия единой актуализированной цифровой планово-картографической основы. Первым шагом в деле обновления картографических материалов города является создание цифровых топографических планов, например в масштабе 1:10 000 для целей обеспечения разработки генерального плана.
Планово-картографическая основа создается в городской системе координат. Хранение, классифицирование и использование всего массива топографической информации реализуется, как правило, в среде ГИС, например MAPINFO. Сведения об объектах хранятся в виде двух логически связанных классов данных – графическая ин-
формация, которая в свою очередь подразделяется на растровые и |
|||||||||||
векторные данные и семантическую информацию. При необходимо- |
|||||||||||
сти вся информация конвертируется в |
|
|
. |
И |
|||||||
|
|
|
|
|
|||||||
Создание ЦТП города в масштабе 1:500 выполняется с целью оп- |
|||||||||||
тимизации затрат и сроков по современной аэрофотогеодезической тех- |
|||||||||||
нологии (см. прил. 2). |
В качестве исходных материалов для ускоренной |
||||||||||
технологии используются аэрофотосъёмка ( ФС) |
городской террито- |
||||||||||
|
|
|
|
|
|
АВТОКАД |
|
||||
рии в крупном |
|
е, например масштабе 1:4000, и воздушное ла- |
|||||||||
зерное |
рование (ВЛС). |
Например, |
ФС и ВЛС г. Омска выполне- |
||||||||
ны с использованием пяти |
|
азовых станций для определения элементов |
|||||||||
внешнего ор ент рован я аэрофотоснимков и сканерного блока. |
|||||||||||
|
|
|
|
А |
Продукт |
неогеогра- |
|||||
|
|
масштаб |
|
|
|||||||
|
|
|
фии в России – Google |
||||||||
|
|
|
Earth достаточно высокого |
||||||||
|
|
|
разрешения |
можно |
|||||||
|
|
|
успешно |
использовать на |
|||||||
скани |
|
|
|
||||||||
|
|
|
стадии |
|
проектирования |
||||||
|
|
|
аэрофотосъёмки города, а |
||||||||
|
|
|
также |
для |
составления |
||||||
|
|
|
|
|
|
|
проекта планово-высотной |
||||
Рис. 13.8. Фрагмент проекта планово-высотной привязки |
наземных опо- |
||||||||||
С |
привязки |
|
|
|
знаков |
и |
его |
реализации, |
|||
|
|
|
|
|
|
|
|
|
|
||
не дожидаясь материалов аэрофотосъёмки, которые достаточно долго проходят процедуры приёмки и специальной цензуры. Такой элемент технологии реализован при картографировании территории г. Омска
180
(рис. 13.8). Растр высокого пространственного разрешения совмещался с реальным проектом аэрофотосъёмки и границей обработки в мировой географической системе координат. Это позволяет реально ускорить процессы проектирования и выполнения полевого комплек-
са аэрофотогеодезических работ по привязке наземных планово- |
|
высотных опознаков. |
И |
|
|
Синхронно с лазерным сканированием, как правило, выполняется цифровая цветная АФС. На омском объекте цифровая фотосъёмка выполнена в масштабе 1:10 000 с фокусным расстоянием 60 мм и раз-
решением в пикселе фотоснимка 7 см. |
Д |
|
|
Воздушное лазерное сканирование осуществляется с высоты 600 |
|
м над средней плоскостью, плотность лазерных точек составляет 6 на 1 м2 при частоте сканирования 150 кГц и средней скорости носителя 140 км/ч. Обработка материалов воздушного лазерного сканирования выполняется по автоматизированным и автоматическим алгоритмам, по которым, в частности, выделяются поверхность земли, здания и сооружения, растительность.
являемым к сечен ю рельефаА0,5 м.
Точность построения ЦМР, полученной по данным ВЛС, контролировалась по материалам полевой инструментальной съёмки. С использованием спутниковых приёмников и электронных тахеометров определялись плановые координаты и высоты идентичных точек. Расхождения между полевыми отметками и отметками, полученными по результатам ВЛС, не превысили 10 см. Точность построения ЦМР по результатам ВЛС соответствует требованиям инструкций, предъ-
1:4000. Цветныемасштабасн 1:10 000, полученные синхронно с лазерным скан рован ем, спользуются при дешифрировании, так
Скак обладаютмкиещё одн м прямым дешифровочным признаком – цветом. Кроме того, по этим снимкам достаточно просто изготовить цветные ортофотопланы масштабов 1:1000 и 1:2000 для различного целевого назначения, учитывая то, что для каждого снимка есть исходные данные в виде элементов внешнего ориентирования и ЦМР.
Деш фр рован е для создания ЦТП масштаба 1:500 выполняет-
ся на увел ченных до масшта а 1:500 фрагментах центральных частей аэрофотосн мков панхроматической аэрофотосъёмки масштаба
Планово-высотная подготовка снимков городской территории выполняется более производительно по GPS-технологии относительно базовых станций. Режим измерения для определения координат планововысотных опознаков − «Быстрая статика». Координаты каждого опо-
181
знака определяются не менее чем от двух базовых станций городской сети. Например, для городской территории Омска точность координат опознаков в плане составила 3 см, по высоте – 4 см.
Фотограмметрическое сгущение опорной геодезической сети, включающей наземные опознаки и центры фотографирования, выполнялось на цифровой фотограмметрической станции Z/I фирмы Intergraph строгим способом уравнивания связок. Для создания цифровых топографических планов использовался специальный классификатор для ЦТП масштаба 1:500.
На основе крупномасштабных топографических съёмок создаются различные геоинформационные (ГИС) и земельно-информационные (ЗИС) системы. В качестве примера можно привести «Концепцию слоев ЗИС», которая приведена на семинаре в Швейцарии на примере г. Регенсдорфа (прил. 3).
Готовая продукция в виде ЦТП масштаба 1:500 выдаётся в цифро- |
||||
вой форме на DVD дисках. Блок-схема технологии создания цифровых |
||||
топографических планов города по материалам |
И |
|||
цифровой фотосъёмки |
||||
и воздушного лазерного сканирования приведена в прил. 2. |
||||
Материалы цифровой цветной аэрофотосъёмки и воздушного ла- |
||||
зерного |
сканирования |
переход |
от плоской векторной |
|
формы представления цифровой информации в ГИС к суперсовремен- |
||||
|
|
|
Д |
|
ному трехмерному документированию объектов города в 3D- |
||||
информационных системах. Это открывает принципиально новые воз- |
||||
можности для детального, достоверного и динамичного отображения и |
||||
модерн зац |
всех аспектов жизни города в трёхмерном пространстве. |
|||
|
|
|
А |
|
С целью упорядоченного подхода к системному обновлению (мо- |
||||
н тор нгу) |
нформац |
нео ходимо о язать, чтобы все вновь создава- |
||
емые |
обновляемые |
планы масштаба 1:500 и новые исполнительные |
||
съёмки разл чныхобеспечиваютстро тельных организаций выполнялись и сдавались в ц фровом стандартном в де, то есть классификатор, перечень и со-
Сдержание слоёв ЦТП должны строго соответствовать установленному для города стандарту.
В целом современные цифровые технологии обновления картографических материалов строятся на широком использовании фотографических изображений местности, полученных как с космических аппаратов, так и с самолетов и других носителей, а также материалах воздушного и наземного мобильного лазерного сканирования. На основе этих изображений создаются цифровые ортофотопланы, векторные планы и суперсовременные 3D-информационные системы.
182
Дальнейшее поддержание картографической и кадастровой информации всего масштабного ряда на современном уровне осуществляется в зависимости от необходимой оперативности, технических требований и экономической эффективности различными методами:
•Обновление карт средних масштабов осуществляется с использованием материалов космической съемки высокого Иразрешения и материалов съёмок прежних лет.
•Оперативное обновление планов крупных масштабов линейно протяженных объектов, например улиц, эффективно осуществлять с использованием наземных мобильных сканирующих систем.
•Современное периодическое обновлениеДкрупномасштабных съемок производится по материалам аэрофотосъемки с лазерным сканированием территории через 5–15 лет в зависимости от интенсивности изменений.
•Текущее дежурное Аобъектовое обновление осуществляется по результатам исполнительных геодезических съемок, которые должны быть представлены по соответствующим слоям в цифровой форме и в городской системе координат.планов ортофотоплановб, что позволяет проектировать и решать дру-
г е задачи не только на плоскости, но и в трёхмерном, и четырёхмерном пространствах.
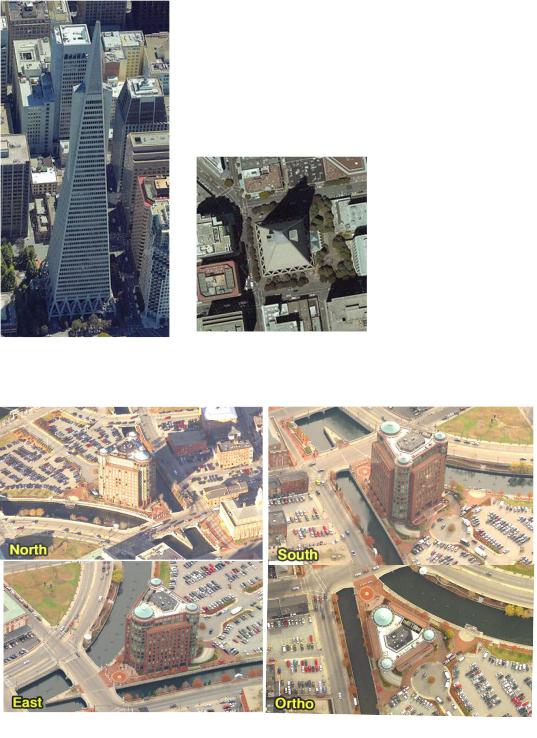
Сже здания (наклонный и плановый фотоснимки), что значительно повышает эффективность принятия решений;
Основные деи достоинства современных технологий:
• |
спользован е качественных цифровых аэрофотоснимков как |
нформац онной основы; |
|
• спользование набора наклонных аэрофотоснимков как изоб- |
|
ражений |
большую узнаваемость объекта (увеличивает |
обеспечивает |
|
количество дешифровочных свойств (рис. 13.9 и 13.10) одного и того |
|
• использование концепции пространственной привязки пикселей изображений.
183
•существующие перспективные информационные технологии:
−Geokosmos 3DModeller;
−информационная система Skyline Software systems;
−информационная система Pictometry;
−3D Image или XYZRGB Image;
−информационная система Multivision. ИД
|
|
А |
|
б |
|
. 13.9. Наклонный Рис. 13.10. Плановый |
||
Рис |
фотоснимок . |
|
фотоснимок |
||
С |
|
|
Рис. 13.11. Примеры изображений Pictometry
184
Например, Pictometry (рис. 13.11) – информационная система, которая обеспечивает пользователям быстрый и лёгкий доступ к изображениям (до 12-ти различных ракурсов) любого объекта: земельного участка, здания, автострады и др. Используя Pictometry, можно получать точные географические координаты каждого пиксе-
•возможность наблюдать объект с любого ракурсаИ, меняя точку
инаправление обзора, возможность «летатьД» над моделью;
•возможность выполнения трёхмерных измерений (по сравнению с ортофотопланом, где все измерения относятся к плоскости);
•более высокие изобразительные (дешифровочные) свойства; Недостаток при рассматриванииАплановых аэро и космических снимков объекта в перспективе (3D) – фотоизображение верти-б
|
Рис |
|
|
|
. 13.12. Фототекстура |
|
Рис.13.13. Искусственная текстура |
||
|
низкого качества |
|
|
|
|
|
|
|
|
|
|
|
|
|
Перечисленные современные |
информационные технологии |
|||
находят применение за рубежом: |
|
|
||
С▪ в военном деле; |
|
|
||
▪ в гражданском проектировании и планировании;
185

в службе безопасности, службе спасения, пожарных службах;
в территориальных администрациях различного уровня (управление, планирование);
|
|
|
|
|
|
|
И |
||
|
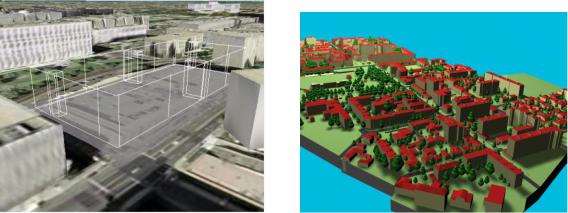
Создание реалистичных фасадов зданий |
|
|
||||||
|
|
|
|
|
|
Д25 |
|
||
|
|
|
|
|
А |
|
|
|
|
|
Исходное фото фасада здания |
РисТек .13.15. Восстановленное и |
|
||||||
|
Рис. 3.14. Исходное фото |
(восстановленное трансформированн е) |
|
||||||
|
|
|
|
|
|
тура модели здания (Обработа ое |
|
|
|
|
|
фасада здания |
|
трансформированное фото |
|
||||
|
|
|
фото фасада зд ния) |
|
|
|
|||
|
|
|
б |
фасада здания |
|
|
|||
|
|
|
|
|
|
|
|
|
объ- |
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
25 |
|
пространственные координаты X, Y, Z соответствующей точки |
|||||||||
ривязка |
|
|
|
|
|
||||
объекта (прямо противоположное Geokosmos 3DModeller!) |
|
|
|||||||
|
Сочетает в се е: |
|
|
|
|
|
|||
• |
высок е метр ческие свойства данных лазерного сканиро- |
||||||||
ван я; |
|
|
|
|
|
|
|
|
|
• |
высок е |
зо раз тельные (дешифровочные) свойства циф- |
|||||||
С |
|
|
|
|
|
|
|
||
рового фото. |
|
|
|
|
|
|
|
|
|
Основные процессы по созданию 3D Image: |
|
|
|
||||||
фотограф рован е; |
|
|
|
|
|||||
лазерное скан рование; |
|
|
|
|
|||||
п |
|
|
цифровых снимков к точкам лазерного сканирования; |
||||||
|
Координаты точек лазерного сканирования распределяются |
||||||||
по пикселям изображения. |
|
|
|
|
|
||||
Достоинства 3D Image:
простота решения и реализации;оперативность получения геоинформационного продукта,
позволяющего определять пространственные координаты и векторы (расстояния);
186

сочетание высокой точности пространственных данных с детальным качественным изображением (точность зависит от разрешения изображения, плотности точек и точности привязки данных).
Выводы:
• |
И |
Информационные системы, основанные на концепции 3D Im- |
age, сочетают в себе лучшие свойства цифрового фото и данных лазерного сканирования (рис. 13.16 и 13.17).
• Направление быстро развивается ввиду высокой наглядности,
практичности и реалистичности, заменяя |
векторные и растровые |
Д |
|
двухмерные информационные системы на |
3D-информационные си- |
стемы.
Первая проблема заключается, как правило, в несведомлённости потребителей о возможностях, способах применения и преимуществах комплексной технологии.
Вторая проблема технологическая. Большой объём информации, которым необходимо манипулировать, требует современной техники и программного обеспечения, т.е. переподготовки специалистов.
Третья проблема финансовая. |
||
|
|
А |
|
б |
|
и |
|
|
С |
|
|
187

Рис. 13.17. Информационная система MultiVision
|
|
|
Контрольные вопросы и задания |
||
1. |
Что включает комплекс аэрофотогеодезических работ для |
||||
геоинформационного обеспечения города? |
|
||||
2. |
Перечислите задачи целевого назначения сети референцных |
||||
(базовых) станций. |
|
И |
|||
3. |
Перечислите основные пункты программы привязки, наблю- |
||||
дения и уравнивания сети базовых станций. |
|
||||
4. |
Какие |
|
предъявляются к созданию современной |
||
городской системы координат? |
Д |
||||
5. |
|
|
|
||
Укажите сущность главного условия создания современной |
|||||
городской системы координат. |
|
|
|||
6. |
Перечислите состав о орудования, необходимого для аэрофо- |
||||
тосъёмки и лазерного сканирования территории города. |
|||||
7. |
Из как х основных элементовА( локов) складывается техноло- |
||||
г я комплекса аэрогеодез ческих ра от по картографированию города? |
|||||
8. |
Что пон мается под планово-высотной подготовкой (привяз- |
||||
кой) сн мков? |
|
|
|
||
9. |
|
требования |
|
|
|
Как е услов я необходимо выполнить для создания городской |
|||||
с стемы коорд нат, в которой минимально искажаются площади? |
|||||
10. Поясните понятие «классификатор». |
|
||||
11. Что |
|
себя представляет послойное тематическое отображе- |
|||
из |
|
|
|||
ние геоинформации? |
|
|
|||
12. Какие |
исходные данные |
необходимы для создания |
|||
3D-моделей? |
|
|
|
|
|
С |
|
|
|
|
|
13. Перечислите преимущества 3D-информационных систем.
188