

При уточнении ковариационной матрицы ошибок Pk вектора оценки состоянияxk учитывается возможность искажения модели поведения системы некоторым случайным процессом. Статистические параметры этого процесса задаются элементами матрицы возмущений Qk.
Поскольку в процессе вычислений изменяются степень неопределенности оценки состояния системы и элементыИковариационной матрицы ошибок, то фильтр Калмана можно рассматривать как алгоритм с переменными весами. При неизменном состоянии системы ал-
горитм фильтра Калмана даст те же результаты, что и классический метод наименьших квадратов, в котором в качестве весовой используется матрица, обратная ковариационной.
Алгоритм фильтра Калмана сегодняДявляется основным средством обработки измеренийбв навигационных системах, использующих спутниковый метод определений. При этом, располагая характеристиками погрешностей о оих систем, фильтр Калмана сводит к минимуму их влияние на выходные навигационные данные [56].
Таким образом, фильтр Калмана является инструментом, позволяющим построить оптимальные оценки системных переменных на основе математической модели системы и по результатам выполнен-
рентная природа, проявляющаяся при работе в реальном времени, и возможность априорной оценки точности получаемых результатов средствами самого алгоритма.
ных измерений. Его важнейшимиАдостоинствами являются рекур-
Математ ческая модель интеграции инерциальных и спутниковых змерен й достаточно сложна, а ее основные положения сводятся
Ск следующему.
и10.4.3. Элементы модели интеграции ИНС и СНС
Выставка блока нерциальных измерений (IMU, заключается в установке его в положен е, при котором его координатные оси будут либо параллельны координатным осям «целевой» системы – транспортного средства (самолета, автомобиля, водного судна и др.) или аэрокамеры, либо совмещены с ними. Рассматриваемая операция выполняется в несколько этапов, включающих грубую выставку приборов и ее уточнение. При этом содержание операций определяется требуемой точностью и, следовательно, областью использования данных.
Грубая выставка блока инерциальных измерений зачастую сводится к жесткому креплению его на соответствующей площадке но-
105

сителя с помощью болтов. Точность такой выставки невысока, и погрешности угловой ориентации могут достигать градуса. Во многих случаях этого достаточно для определения положения движущегося объекта (например, в автомобильном транспорте), тем более что па-
раметры выставки все равно будут уточнены при инициализации си- |
|
стемы. |
И |
|
|
Порядок грубой выставки определяется инструкцией по эксплуатации блока в рамках соответствующей технологии.
Уточнение параметров выставки («точная выставка») иногда совмещается с инициализацией системы и выполняется непосредственно перед началом измерений с целью определения начальных установок и настройки оборудования. Решение этих задач зачастую требует выполнения определенных действий, регламентируемых руководством по эксплуатации системы и связанных с перемещением носителя (самолета или автомобиля) по определенной траектории. Автоматическая обработка полученных при этом инерциальных и спутниковых данных позволяет определить начальные значения параметров полета и иные необходимые данные.
Руководство по эксплуатации съемочной системы ADS40 рекомендует выполнять уточнение выставки измерительных блоков и их
Точность определен я параметров выставки при такой регулировке вполне достаточна для целей навигации, однако не всегда соот-
регулировку за 5 – 6 мин до начала и после завершения съемки участ- |
||
|
|
Д |
ка. С этой целью выполняются два последовательных разворота на |
||
180 с углом крена не |
олее 25 с последующим выходом на первый |
|
аэрофотосъемочный маршрут (рис. 10.18). |
||
|
А |
|
Р с. 10.18. Траектор |
полета для регулировки измерительного блока INS |
|
б |
|
|
точности |
|
|
ветствует |
фотограмметрической обработки материалов |
аэрофотосъемки. Поэтому параметры выставки могут быть уточнены |
|
при совместной обработке результатов фотограмметрических, инер- |
|
циальных и спутниковых измерений с использованием метода само- |
|
калибровки. |
|
Обработка инерциальных и спутниковых измерений выполняется |
|
Сс целью получения координат точек, в которых выполнены инерциаль- |
|
106

ные измерения, и углов наклона платформы с помощью специальных программ и при минимальном вмешательстве оператора. При этом:
•измеренные акселерометрами кажущиеся ускорения wX, wY, wZ по найденным с помощью гироскопов углам трансформируются на
оси установленной при выставке системы координат и используются для интегрирования выражения (10.2) и вычисленияИскорости движения и текущих координат по формулам (10.1);
•синхронизация инерциальных и спутниковых измерений выполняется по временным меткам, причем спутниковые данные обнов-Д
должительность измерений в секундах от начала работ; |
|
|||
• текущий угол крена основания, на котором установлен блок |
||||
инерциальных измерений (в фотограмметрии – поперечный угол |
||||
наклона снимка ), приводится к плоскости истинного меридиана, |
||||
угол тангажа (продольного наклона снимка ) – к плоскости, перпен- |
||||
дикулярной к истинному меридиану; угол рысканья (разворота ) от- |
||||
считывается |
|
следа плоскости, содержащей угол . |
||
|
|
А |
|
|
|
Алгор тм |
|
|
Координаты, |
|
нав гац |
|
2 |
углы наклона, |
|
|
скорость, |
||
|
б |
|
||
Блок IMU |
+ |
ускорение, |
||
|
время, … |
|||
|
− |
|||
|
|
|||
|
|
|
||
|
+ |
|
|
|
|
1 |
|
Фильтр Калмана |
|
относительно |
|
|
||
|
|
|
||
Блок GPS |
− |
|
|
|
С |
Рис.10.19. Структурная схема комплекса GPS/IMU |
|||
|
|
|
|
|
|
|
107 |
|
|
Согласование результатов инерциальных и спутниковых изме-
рений выполняется в бортовом вычислителе (рис. 10.19), функции которого сводятся к следующему [56].
блок IMU (инерциальных измерений) выполняет измерение па-
раметров ориентации и проекций вектора кажущегося ускорения на координатные оси инерциальной системы, после чегоИнаправляет их на вход блока «Алгоритм навигации»;
блок GPS (спутниковых измерений) осуществляет прием сиг-
налов спутников, выполняет первичную обработку данных и направляет полученные результаты на вход блока 1;
«алгоритм навигации» осуществляетД:А
фактическими и прогнозируемыми данными и передает на вход Калмана как элементы в е к т о р а и з м е р е - н и й, содержащие погрешности;
5) ф льтр Калмана на основе полученного из блока 1 век-
тора |
змерен й определяет оптимальную оценку состоя- |
|
н я с стемы, передает ее и ковариационную матрицу |
||
ош |
|
состоян я на вход блока 2; |
6) блок 2 по полученным данным формирует: |
||
• |
бок |
|
|
опт мальную оценку состояния навигационной систе- |
|
|
|
мы (коорд наты, углы наклона и др.) и передает ее как |
|
|
выходной сигнал для последующего использования; |
фильтра• передает в алгоритм навигации сигнал, по которому |
||
|
|
выполняется «сброс» начальных установок приборов. |
СТаким образом, алгоритм последовательно обрабатывает вновь поступающие векторы измерений с учетом значений, вычисленных в предшествующем цикле, и передает полученные данные для накопления и последующей обработки.
108
Z
F
B′ |
D′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
F′ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
D |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E′ |
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
C′ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
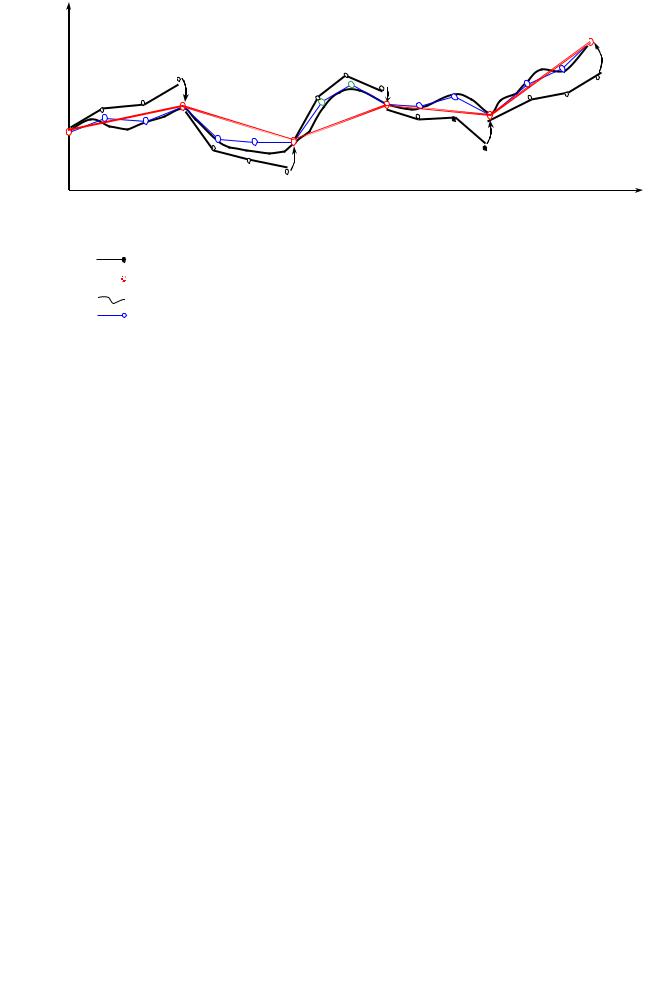
Рис. 10.20. Принципиальная схема интеграции данных GPS и IMU |
|||||||||||||||||||
(1) |
– точки UMI-измерений и восстановленная по ним траектория; |
|||||||||||||||||||||
(2) |
– точки GPS-измерений и восстановленная по ним траектория; |
|||||||||||||||||||||
(3) |
– реальная траектория; |
|
|
|
|
|
|
|
|
|||||||||||||
(4) |
– траектория по результатам интеграции данных GPS и IMU. |
|||||||||||||||||||||
|
|
|
В процессе |
постобработки полученных данных |
накопленная |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||
информация обрабатывается в обратном порядке, что позволяет уточ- |
||||||||||||||||||||||
нить все оценки состояния системы на любой момент времени и тем |
||||||||||||||||||||||
самым существенно повысить их точность. |
|
|
|
|
|
|
||||||||||||||||
|
|
|
Принципиальную схему согласования данных инерциальной и |
|||||||||||||||||||
спутниковой навигационной систем и процесс исключения влияния |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|||||||
дрейфа гироскопов и акселерометров блока IMU можно показать на |
||||||||||||||||||||||
примере коррекции траектории, спроектированной на координатную |
||||||||||||||||||||||
плоскость OXZ (рис. 10.20): |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
• в точках A, B, C, D, E и F, где выполнены спутниковые и инер- |
|||||||||||||||||||
ц альные змерен |
|
А |
|
|
|
|
|
|
||||||||||||||
я, реальная траектория (3) совпадает с траектория- |
||||||||||||||||||||||
ми, |
выч |
|
|
|
|
|
по данным инерциальных (1) и спутниковых (2), |
|||||||||||||||
что обусловлено « |
|
» влияния накопленного к этому моменту |
||||||||||||||||||||
дрейфа акселерометров г роскопов; |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
сбросом |
|
|
|
|
|
|
|
|
||||||||
|
|
|
• по мере удален я от точек спутниковых измерений точки про- |
|||||||||||||||||||
екц |
|
траектор |
|
|
, |
найденной по данным инерциальных измерений, |
||||||||||||||||
все более удаляются от реальной (3), и в итоге по данным IMU будут |
||||||||||||||||||||||
получены фрагменты траектории AB′, BC′, CD′ DF′ (1); |
|
|
|
|||||||||||||||||||
|
|
|
сленными |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
• в процессе послеполетной обработки (постобработки) данных |
|||||||||||||||||||
инерциальных и спутниковых измерений: |
|
|
|
|
|
|
||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1) |
точки B′, C′, D′, F′ фрагментов (1) совмещаются с точками |
|||||||||||||||||||
спутниковых измерений B, C, D, F; |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
2) |
фрагменты (1) траектории AB′, BC′, CD′ и DF′ разворачива- |
|||||||||||||||||||
ются вокруг начальных точек A, B, C, D, в результате чего преобразу-
109
ются во фрагменты траектории AB, BC, CD и DF (4) соответственно и оказываются в непосредственной близости от фактической.
Приведенная интерпретация несколько условна, но она отражает принцип согласования результатов инерциальных и спутниковых данных, дает ключ к пониманию причин относительно невысокой их точ-
−параметров железнодорожного полотнаД(в т.ч. егоИдеформации);
−местоположения Аподвижного состава железнодорожного транспорта, автомобилей и других движущихся объектов;
−координат геодезических пунктов различного назначения иобеспечен
NovAtel Inc. (Канада). Эта система о еспечивает позиционирование с |
||
обработкой данных как в реальном времени (т.е. с помощью процес- |
||
НАСС |
|
|
сора пр емн ка), так постобработки (т.е. в |
специализированном |
|
программном |
). При определенных обстоятельствах эта |
|
с стема может пр меняться и при выполнении аэросъемки. Ее со- |
||
ставляющ ми являются [50]: |
|
|
• двух- |
трехчастотные ГЛОНАСС/GPS – приемники |
|
DL-4илиplus ProPak-V3 компании NovAtel с радиоканалом УКВ или |
||
GSM для передачи дифференциальных поправок в реальном времени; |
||
• двух- |
или трехчастотные антенны |
компании NovAtel |
GPS-702-GG (для высокоточных работ и совместной работы ГЛО- /GPS) или GPS-702L, GPS-702-GGL, ANT-534 (для дифферен-
циального сервиса OmniStar);
110
• блок инерциальных измерений одной из рассмотренных выше конструкций, с помощью которого выполняются инерциальные
измерения с частотой 100 Гц; |
|
• пакет программ для комплексной постобработки спутниковых |
|
и инерциальных измерений. |
И |
|
|
Алгоритм вычислительной обработки позволяет включить в об- |
|
работку как инерциальные, так и первичные спутниковые измерения |
|
(псевдодальности, псевдофазы и доплеровские сдвиги частоты), что позволяет получать надежные решения даже при недостаточном числе наблюдаемых спутников. Кроме того, допустимо использование режимов абсолютных, относительных и дифференциальных спутниковых измерений и их комбинаций, что позволяет сократить время захвата и перезахвата сигналов от спутников, а также существенно снизить время инициализации при RTK режиме.
Экспериментальная проверка точностиДпозиционирования с использованием технологии SPAN была выполнена путем проложения трассы с включением в нее пунктов, расположенных на застроенных территориях с многоэтажной застройкой, в залесенной местности, под мостами и эстакадами. В ряде случаев участки трассы с полным отсут-
О разработке технологии SPAN было объявлено в августе 2004 г., а публикации о ней можно найти на сайтах компании NovAtel и свя-
занных с ней российских компаний GPScom и GNSSplus.
ствием радиовидимости оказывались довольно протяженными.
|
Средние квадратические погрешности определения планового |
|
положен я эт х пунктов оказались равными [50]: |
||
• |
|
А |
при автономных (а солютных) измерениях − более 1,5 м; |
||
• |
при д фференц альных измерениях с помощью систем: |
|
|
o SBAS (WAAS/EGNOS) – менее 0,90 м; |
|
|
o DGPSб(по коду) – 0,45 м; |
|
|
o OmniSTAR (HP+) – 10-15cм; |
|
• |
относ тельных змерениях в режиме RT-2 – 10 мм 1 мм/км; |
|
• |
постобработке – 5 мм 1 мм/км. |
|
|
при |
|
|
При этом погрешности определения скорости, ускорения и вре- |
|
С |
|
|
мени оказались равными 0,02 м/с, 0,03 м/с2 и 20 нс соответственно. Как следует из приведенных данных, использование интегриро-
ванной технологии инерциальных и спутниковых измерений SPAN обеспечивает достаточно высокую точность получения координат определяемых точек вне зависимости от условий видимости на них.
111
Проявляющийся повышенный интерес к средствам и методам интеграции инерциальных и спутниковых измерений со стороны геодезистов и топографов дает уверенность, что они займут достойное место в ряду современных технологий производства топографо-
геодезических и изыскательских работ. |
И |
|
|
В 2005 – 2007 гг. компанией NovAtel был разработан метод |
|
точного позиционирования PPP (Precise Point Positioning), обеспечи- |
|
вающий возможность позиционирования с точностью 10 – 30 см в режиме кинематики и 1,5 – 2,0 см в режиме статики без использования базовых станций. Решения базируются на использовании двухчастотных GPS-приемников и точных эфемерид наблюдаемых спутников, содержащихся в файлах Rapid и Final и доступных спустя 17 и 12 ч соответственно через сеть Международной службы навигационных сообщений IGS. Оба решения, реализованные в программах GrafNav компании NovAtel версий 7.70 – 8.10, используют алгоритмы многопроходного (multi-pass) сглаживания при помощи фильтра Калмана и широко применяются при выполнении изыскательских и
аэрофотогеодезических работ в Канаде, |
, России и в ряде дру- |
||||||
гих стран. |
|
|
|
|
|
|
|
|
|
|
Контрольные вопросы и задания |
||||
|
|
|
|
|
|
Д |
|
1. |
Перечислите системы координат, используемые для навига- |
||||||
ционных задач. |
|
|
|
|
|
||
2. |
Какой принцип навигации возможно применять при работах |
||||||
под землёй под водой? |
США |
|
|||||
3. |
|
|
|
|
|||
На как х положен ях |
азируется инерциальная навигация? |
||||||
4. |
Что определяет пр |
акселерометр? |
|
||||
5. |
Что определяет пр |
гироскоп? |
|
||||
6. |
Что вход т в состав инерциального измерительного блока? |
||||||
|
|
|
бор |
|
|
||
7. |
Какова задача нав гационной системы при управлении полё- |
||||||
том летательного аппарата? |
|
|
|
||||
8. |
В чём особенности навигации автомобильного транспорта? |
||||||
9. |
|
две глобальные навигационные системы вы знаете? |
|||||
СКакие |
|
|
|
|
|||
10.Что означает термин «позиционирование»?
11.Почему система спутниковой навигации и позиционирования является глобальной?
12.Из каких трёх основных сегментов состоит спутниковая навигационная система?
112
13. |
В чём заключаются особенности построения функциониро- |
||||||
вания современного космического сектора? |
|
||||||
14. |
Сколько спутников входит в космический сегмент систем |
||||||
ГЛОНАСС и GPS и каково их распределение вокруг Земли? |
|||||||
15. |
Какие функции осуществляет |
сегмент управления и кон- |
|||||
троля систем ГЛОНАСС и GPS? |
|
|
И |
||||
|
|
|
|||||
16. |
Что представляют собой эфемериды спутников? |
||||||
17. |
На каких стадиях используются прогноз эфемерид и их |
||||||
окончательные значения? |
|
|
|
|
|
||
18. |
Перечислите конечные результаты, которые получает по- |
||||||
требитель от систем ГЛОНАСС и GPS. |
Д |
||||||
|
|
|
|||||
19. Что является технологической основой сектора потребителя? |
|||||||
20. |
Сколько спутников минимально необходимо наблюдать для |
||||||
определения пространственных координат потребителя? |
|||||||
21. |
Понятие о дифференциальной |
подсистеме (сети базовых |
|||||
станций). |
|
А |
|
||||
|
|
|
|
|
|
||
22. |
Какая информация посылается потребителю для определе- |
||||||
ния координат спутников на момент наблюдения? |
|
||||||
23. |
Какому уровню точности соответствуют потенциальные |
||||||
|
|
б |
|
|
|
||
возможности фазовых методов измерений несущей частоты? |
|||||||
24. |
Перечислите источники погрешностей, которые влияют на |
||||||
точность определения координат. |
|
|
|
||||
25. |
В чём заключается сущность дифференциальных методов, |
||||||
используется |
|
|
|
|
|||
базирующихся на определении разности, а не на абсолютных значе- |
|||||||
н ях коорд нат? |
|
|
|
|
|
||
26. |
Каковы пр нц пы разрешения неоднозначности при фазо- |
||||||
вых змерен ях? |
|
|
|
|
|
||
27. |
Как е две основные стадии обработки измерений при геоде- |
||||||
С |
|
|
|
|
|
|
|
з ческ х спутн ковых определениях вы знаете? |
|
||||||
28. |
Переч сл те реж мы работ спутниковых геодезических при- |
||||||
ёмн ков. |
|
|
|
|
|
|
|
29. |
Чем различаются лучевой и сетевой методы определений? |
||||||
30. |
Как |
|
|
навигация при реализации проекта аэро- |
|||
фотосъёмки?
31.Какими методами и с какой точность определяются координаты центров фотографирования при аэрофотосъёмке?
32.Как осуществляется переход от координат фазового центра антенны спутникового приёмника к координатам центра проекции фотокамеры?
113