

2328
.pdfУгол отрицательный в формуле (6.37), когда он находится над стрелой, и угол положительный, если он расположен под стрелой.
Учитывая, что 4 и – постоянные величины, запишем аналитическую функцию уравнения угла стрелы:
(4) |
= 4 arccos |
d2 |
l |
2 |
c2 |
|
|
4 |
|
4 |
с |
. |
(6.38) |
||
|
|
|
|
||||
|
|
|
2d4l4 |
|
|||
Полученные уравнения (6.35), (6.36) и (6.38) являются аналитическими функциями угла стрелы (4) , с помощью которых можно выполнять различные математические операции и преобразования. Переменная cс – длина гидроцилиндра стрелы – является функцией перемещения поршня SП и времени t.
Угловая скорость стрелы определяется как частная производная по двум параметрам c4 и t от функции углов (6.35), (6.36), (6.38):
(4) |
d (4) |
|
d (4) |
|
dc |
с |
. |
(6.39) |
||
|
dt |
|
|
dcс |
|
dt |
|
|||
Согласно теории И.И. Артоболевского, производные от функций |
||||||||||
углов по перемещению поршня |
|
d (4) |
могут |
рассматриваться как |
||||||
|
|
|
|
|||||||
dcс
аналоги угловой скорости звеньев механизма, имеющие размерность рад/м. Из уравнения (6.34) аналог угловой скорости стрелы имеет вид
u (4) |
|
d (4) |
|
|
|
|
|
|
|
|
|
l42 cс2 d42 |
|
|
|
|
|
|
|
|||||||||
|
|
dcс |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
с |
|
|
(2l c )2 (l2 |
c2 |
d2)2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
с |
4 |
|
с |
4 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d42 cс2 l42 |
|
|
|
|
. |
|
|
|
(6.40) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
c (2d |
4 |
c |
с |
)2 |
(d2 |
c |
2 |
l2)2 |
|
|
|
||||||||||||
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
4 |
с |
4 |
|
|
|
|
|
|
|
||||
Аналогично из уравнения (6.35) аналог угловой скорости имеет |
||||||||||||||||||||||||||||
вид |
|
|
|
d (4) |
|
|
|
|
|
|
|
|
2cс |
|
|
|
|
|
|
|
|
|
||||||
u (4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(6.41) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
dcс |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
(2d4l4)2 (d42 |
l42 |
cс2)2 |
|
|||||||||||||||||||
В уравнении (6.39) dcс  dt – скорость поршня в гидроцилиндре при прямом ходе (подъеме стрелы) и обратном ходе поршня (опускании стрелы). Введем обозначения VП , VОП – соответственно скорости поршня при подъеме и опускании стрелы.
dt – скорость поршня в гидроцилиндре при прямом ходе (подъеме стрелы) и обратном ходе поршня (опускании стрелы). Введем обозначения VП , VОП – соответственно скорости поршня при подъеме и опускании стрелы.
Аналитические функции угловых скоростей звеньев кулисного поршневого механизма при подъеме и опускании стрелы можно записать окончательно
(4) u |
V |
П |
; |
(4) |
u |
(4) |
V . |
(6.42) |
(4) |
|
|
|
|
ОП |
|
Из уравнения (6.42) видим, что функция u (4) является аналогом
угловой скорости (4) , т.к. отличается от нее только масштабным коэффициентом, роль которого выполняет скорость прямого хода поршня VП или скорость обратного хода VОП .
Угловое ускорение стрелы определяется как производная по времени t от функции (6.39) угловых скоростей:
(4) |
|
d (4) |
|
d (4) |
|
dcс |
. |
(6.43) |
|
dcс |
|
||||||
|
|
dt |
|
|
dt |
|
||
Аналог углового ускорения стрелы как производная по сc от функции (6.41) аналога угловой скорости после преобразования имеет окончательный вид
|
du |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
u (4) |
(4) |
2 (2d4l4)2 |
(d42 l42 |
cс2)2 2 – |
|
||||||||
dcс |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4cс2 (2d4l4)2 (d42 |
l42 |
|
|
3 |
(d42 l42 |
cс2). |
(6.44) |
||||||
|
|
||||||||||||
cс2)2 2 |
|||||||||||||
Угловое ускорение стрелы при подъеме и опускании |
|||||||||||||
определяется по формулам: |
|
|
|
|
|
|
|
|
|
|
|
||
|
(4) |
u |
(4) |
V |
П |
; |
(4) u |
|
|
V . |
|
(6.45) |
|
|
|
|
|
|
|
(4) ОП |
|
|
|||||
Втабл. 6.2 для фронтальных погрузчиков приведены параметры гидромеханизма подъема стрелы.
Втабл. 6.3 приведены относительные безразмерные величины этих параметров, которые можно использовать при проектировании погрузчиков.
Таблица 6.2
Параметры гидромеханизма подъема стрелы
|
|
|
|
|
|
|
|
|
Диаметр |
Коэф- |
Диа- |
|
Грузо- |
Параметры кривошипно- |
гидроци- |
фици- |
метр |
||||||
|
кулисного механизма с ведущим |
линдра |
ент |
штока |
|||||||
Марка |
подъ- |
|
поршнем (размеры |
|
стрелы, |
увели- |
|||||
|
|
при |
|||||||||
машины |
емность |
кинематического треугольника), |
диаметр |
чения |
Kс =2, |
||||||
|
QП ,т |
|
|
|
мм |
|
штока, |
ско- |
мм |
||
|
|
|
|
|
|
|
|
мм |
рости |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
d4 |
|
l4 |
|
c4min |
|
c4max |
Dc dc |
Kc |
dc |

ПК-2 |
2,0 |
440 |
1310 |
1045 |
1675 |
125 |
56 |
1,25 |
88,4 |
ПК-3 |
3 |
1365 |
526 |
1125 |
1835 |
125 60 |
1,30 |
88,4 |
|
ПК-4 |
3,8 |
1644 |
620 |
1227 |
2065 |
125 60 |
1,30 |
88,4 |
|
ПГ-4,5 |
4,5 |
1158 |
1642 |
1347 |
2484 |
140 |
70 |
1,33 |
99,0 |
ПК-7 |
7,0 |
1790 |
832 |
1530 |
2530 |
160 80 |
1,33 |
113,14 |
|
ПК-15 |
15,0 |
2405 |
1254,8 |
2025 |
3425 |
220 |
110 |
1,33 |
155,6 |
ПК-30 |
30,0 |
3709 |
1506 |
2979 |
4858 |
280 |
125 |
1,25 |
198,0 |
ПК-45 |
45,0 |
4189 |
1840 |
3686 |
5729 |
320 150 |
1,28 |
226 |
|
ПК-60 |
60,0 |
4530 |
2202 |
4178 |
6441 |
350 175 |
1,32 |
251 |
|
ПК-75 |
75,0 |
5091 |
2591 |
4456 |
7368 |
400 |
200 |
1,33 |
283,0 |
|
|
|
|
|
|
|
|
Таблица 6.3 |
|
|
|
Относительные параметры гидромеханизма подъема стрелы |
|||||||
|
|
|
|
|
|
|
|
|
|
Марка |
|
|
Грузоподъ- |
Длина |
Относительные параметры кривошипно- |
||||
|
|
емность |
стрелы |
кулисного механизма с ведущим поршнем, мм |
|
||||
машины |
|
|
|||||||
|
QП , т |
LC , мм |
d4 Lc |
l4 Lc |
cсmin Lc |
cсmax Lc |
|
||
|
|
|
|
||||||
ПК-2* |
|
|
2,0 |
2285 |
0,1926 |
0,5733 |
0,4573 |
0,7330 |
|
ПК-3 |
|
|
3 |
2330 |
0,5858 |
0,226 |
0,4828 |
0,7876 |
|
ПК-4 |
|
|
3,8 |
2790 |
0,5892 |
0,2222 |
0,4398 |
0,7401 |
|
ПГ-4,5 |
|
|
4,5 |
3075 |
0,3765 |
0,5340 |
0,4380 |
0,8078 |
|
ПК-7 |
|
|
7,0 |
3380 |
0,5296 |
0,2462 |
0,4527 |
0,7485 |
|
ПК-15 |
|
|
15 |
4440 |
0,5417 |
0,2827 |
0,4561 |
0,7714 |
|
ПК-30 |
|
|
30,0 |
6400 |
0,5795 |
0,2353 |
0,4655 |
0,7591 |
|
ПК-45 |
|
|
45,0 |
7117 |
0,5886 |
0,2585 |
0,5179 |
0,8050 |
|
ПК-60 |
|
|
60,0 |
7886 |
0,5744 |
0,2792 |
0,5298 |
0,8168 |
|
ПК-75 |
|
|
75,0 |
8754 |
0,5816 |
0,2960 |
0,5090 |
0,8417 |
|
* |
|
погрузчик ПК-2 имеет горизонтальное расположение гидроцилиндров |
|
||||||
стрелы, его из анализа можно исключить или поменять местами d4  Lc и l4
Lc и l4  Lc .
Lc .
На рис. 6.10 показана |
|
зависимость диаметра DC (мм) |
||
гидроцилиндра стрелы от грузоподъемности QП (т). |
|
|||
Корреляционная функция этой зависимости имеет вид |
|
|||
D 95,577 3 |
|
|
14,544. |
(6.46) |
Q |
П |
|||
C |
|
|
|
|
На рис. 6.11 показана |
зависимость диаметра dC |
штока |
||
гидроцилиндра стрелы от грузоподъемности, определяемая по формуле
dC 46,238 3
 QП 8,659. (6.47)
QП 8,659. (6.47)

Рис. 6.10 |
Рис. 6.11 |
На рис. 6.12, 6.13 представлены зависимости сторон d4, l4 кинематического треугольника гидромеханизма стрелы от грузоподъемности QП , для которых получены корреляционные функции
d4 1444,4 |
3 QП 991,72; |
(6.48) |
||||
l4 507,99 |
3 |
|
157,99. |
(6.49) |
||
QП |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.12 |
|
|
|
|
Рис. 6.13 |
|
|
|
|
|
|
|
|
На рис. 6.14, 6.15 приведены зависимости длины звена |
ссmin, |
|||||
сс max от грузоподъемности QП . |
Корреляционные функции |
этих |
||||
зависимостей |
|
|
|
|
664,41; |
(6.50) |
ссmin 1205,4 |
3 |
|
|
|
||
QП |
||||||
ссmax 1880,4 |
3 |
|
876,56. |
(6.51) |
||
QП |
||||||

СС min , MM
4000 
3000 
2000 
1000 
0 |
15 |
30 |
45 |
60 QП, Т |
Рис. 6.14
Рис. 6.15
На рис. 6.16, 6.17 по аналитическим формулам (6.31), (6.32) построены зависимости углов поворота звеньев 2, 3 от перемещения поршня гидроцилиндра стрелы для погрузчиков ПК-15 (рис. 6.16,а,б) и ПК-2 (рис. 6.17,а,б). Перемещение поршня SП показано в долях от максимальной величины SП max в процентах.
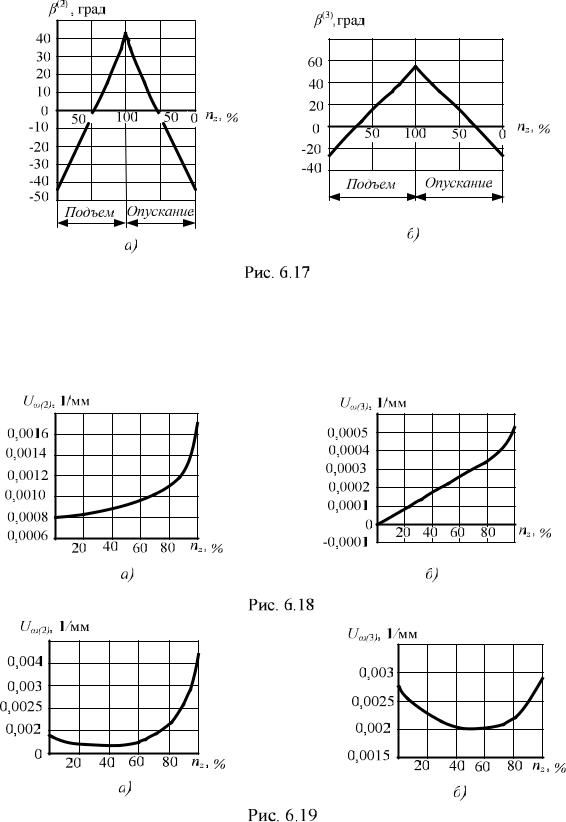
Аналогичным образом на рис. 6.18, 6.19 по аналитическим зависимостям построены графики аналогов угловых скоростей для колесных погрузчиков ПК-15 (рис. 6.18,а,б) и ПК-2 (рис. 6.19,а,б).
На рис. 6.20 (для погрузчика ПК-15) и рис. 6.21 (для погрузчика ПК-2) показаны графики угловых скоростей (4) этих погрузчиков

для периодов подъема и опускания стрелы. Графики оказываются разными вследствие разных скоростей подъема и опускания поршня
VП и VОП .
(4), |
|
|
|
Установлено, что величины, |
|||
скоростей, |
т.е. функции |
cс |
, |
|
|
(4) |
|
(4),
обратные аналогам угловых
представляют собой функции
изменения плеча h гидромеханизма стрелы в функции перемещения поршня в долях nz от его максимальной величины перемещения поршня: рис. 6.22 для погрузчика ПК-15, рис. 6.23 для ПК-2.

Важным параметром рассматриваемых механизмов является скорость поршня. Если расчетную среднюю скорость поршня при подъеме стрелы VП задать, например, VП =0,1 м/с, то скорость поршня при опускании стрелы будет больше вследствие подачи рабочей жидкости в штоковую полость гидроцилиндра, имеющую меньший объем.
Коэффициент увеличения скорости Kс в этом случае равен отношению площади поршня к площади сечения штоковой полости гидроцилиндра и определяется по формуле
|
|
|
V |
|
|
D2 |
|
|
|
|
K |
c |
|
OП |
|
|
c |
|
. |
(6.52) |
|
|
D2 |
d2 |
||||||||
|
|
V |
П |
|
|
|||||
|
|
|
|
c |
|
c |
|
|
||
В табл. 6.2 приведены значения коэффициентов Kc для гидроцилиндров погрузчиков. На рис. 6.20, 6.21 при исследовании характеристик угловых скоростей подъема и опускания приняты: VП =0,1 м/с; VOП =0,15 м/с. Уровень и тенденции развития современной техники позволяют пересмотреть параметры используемых гидроцилиндров. Для повышения производительности машин можно скорость холостого хода поршня удвоить по сравнению со скоростью прямого хода.
В таблице 6.2. приведены значения диаметров штоков, при которых скорость обратного холостого хода удваивается:
VOП =VП Kc . (6.53)
Соотношение диаметров поршня и штока, удовлетворяющее условию Kc =2, определяется по выражению
|
|
|
D2 |
|
|
d |
c |
|
c |
0,707D . |
(6.54) |
|
|||||
|
|
2 |
c |
|
|
|
|
|
|
|
Увеличение скорости обратного хода поршня согласно табл. 6.2 связано с использованием гидроцилиндров, имеющих шток увеличенного диаметра. С целью экономии металла штоки больших гидроцилиндров тяжелых машин выполняют пустотелыми при условии обеспечения их прочности и продольной устойчивости.
Полученные аналитические функции и графики табл. 6.2, 6.3 в технической литературе приводятся впервые. Графики аналогов
угловых скоростей u позволяют выбрать параметры таким
(2)
образом, чтобы при постоянной скорости перемещения поршня при подъеме и опускании угловая скорость стрелы изменялась в

ограниченных пределах и не имела характер функции, убыстряющей свое изменение при приближении к предельному значению.
Исследования показали, что приближение поршня к предельному верхнему положению связано с нарастающими изменениями угловой скорости и углового ускорения звеньев механизма и сопровождается значительным увеличением сил вследствие уменьшения плеча силы штока и увеличения сил инерции.
Геометрический метод кинематических треугольников отличается от существующего метода замкнутых векторных контуров и позволяет получать более простые конечные формулы.
Предложен геометрический метод расчета рычажных механизмов с помощью метода кинематических треугольников, в котором используется метод преобразования координат и уравнения углов как аналитические функции.
Впервые с помощью метода кинематических треугольников установлена связь кинематических передаточных функций механизма
|
|
с функциями изменения силового плеча |
с |
для рычажных |
|
|
|
||
|
с |
|
||
механизмов с ведущим поршнем. |
|
|
||
6.4. Математическая модель кинематических и силовых расчетов гидромеханизма поворота ковша
На рис. 6.24 показаны кинематические треугольники для механизма поворота ковша. Для кинематического треугольника с вершинами 5.1, 5.3, 3.10 длина вектора d5 фиксированного звена определяется по формуле
d5 
 (y4.6 y3.10)2 (z4.6 z3.10)2.
(y4.6 y3.10)2 (z4.6 z3.10)2.

z |
|
|
y(5) |
|
|
|
|
|
y(6) |
|
3.10 |
|
|
|
|
|
6.3 |
||||
|
cК |
|
|
|
|
l6 |
7.3 |
φ(6) |
||
|
5.3 |
|
|
|
|
|||||
5 5 |
β5 |
|
6.1 |
6 |
β6 |
c6 |
||||
d5 |
|
α5 |
l5 |
φ |
(5) |
5.4 |
d6 |
α6 |
φ6 |
|
|
|
|
|
|
|
|||||
|
z(5) |
|
5.1;4.6 |
7.8 |
|
|
|
7.1 |
||
|
|
|
l5-6 |
|
y(6) |
|
|
|
|
|
|
|
|
7.3 |
|
φ(6) |
|
|
|
|
|
z |
(6) |
|
l6 |
|
|
|
z |
(7) |
|
|
|
|
|
|
|
c6 |
|
|
|
||
5.4 |
|
|
|
|
|
|
|
|
||
6.1 |
d→6 φ6 |
|
|
7.4 |
y |
|||||
0 |
|
|
7.1 |
φ(7) |
7.5 |
|
|
|
||
|
|
|
|
|
y(7) |
|
|
|
|
|
Рис. 6.24
Направление вектора d5 определяется по формуле
|
|
z4.6 |
z3.10 |
|
|
|
|
y4.6 |
y3.10 |
|
arcsin |
d5 |
; |
|
arccos |
|
d5 |
; |
|||
|
≥0, то |
|
; |
|
|
|
||||
|
|
|
||||||||
если |
5= |
|
|
если < 0, то |
5= − . |
|||||
Углы в кинематическом |
треугольнике |
можно определить по |
||||||||
теореме косинусов: arccos d52 c2 l52 ;
К
5
2d5cК
c2 l52 d52
5 arccos К .
2cКl5
Для вершины 5.1 кинематического треугольника уравнение углов имеет вид
5 5 (5) . |
|
|
|
|
(6.55) |
||||
Учитывая сумму углов кинематического треугольника |
|
||||||||
|
5 5 5 , |
|
|
|
|
|
|||
из (6.55) можно определить угол |
|
|
|
|
|
|
|
||
|
(5) 5 5 5. |
|
|
|
|
(6.56) |
|||
В уравнении (6.56) 5 |
постоянная величина при неподвижной |
||||||||
стреле, поэтому |
|
|
|
c2 |
l2 |
d2 |
|
||
|
d2 |
c2 |
l2 |
|
|||||
(5) = 5 arccos |
5 |
К |
5 |
arccos |
К |
5 |
5 |
. |
(6.57) |
|
|
|
|||||||
|
|
|
|
|
|
||||
|
|
2d5cК |
|
2cКl5 |
|
||||
Угловая скорость рычага – производная по времени от угла 5: