

2328
.pdfПК-15 |
15,0 |
74000 |
507,6 |
294,3 |
ПК-30 |
30,0 |
139000 |
953,5 |
588 |
ПК-45 |
45,0 |
161000 |
1104,5 |
882 |
ПК-60 |
60,0 |
209000 |
1433,7 |
1176 |
ПК-75 |
75,0 |
245000 |
1680,7 |
1472 |
Условие (6.10) согласуется с понятием номинальной грузоподъемности погрузчиков, которая по рекомендации [54] принимается равной половине опрокидывающей нагрузки. В табл. 6.1 приведены значения силы P2max , удовлетворяющие условию (6.10). Одновременное сочетание максимальных значений сил P1max и P2max при работе машины является маловероятным событием, которое возникает при расположении режущей кромки ковша на опорной поверхности.
Рассмотрим процесс подъема рабочего оборудования гидроцилиндрами стрелы, когда в гидроцилиндрах поворота ковша возникают пассивные давления в поршневых полостях.
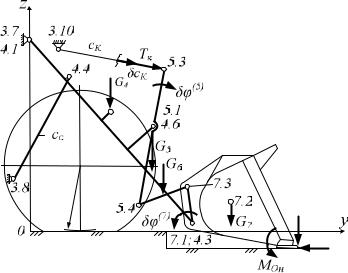
Для определения усилия в гидроцилиндрах стрелы при черпании материала или копании грунта освободимся от соответствующей связи и заменим гидроцилиндр силой Tс (см. рис. 6.4). Зададим возможное перемещение cс поршню гидроцилиндра стрелы и угловое возможное перемещение (4) стреле. Обобщенную
координату q2 фиксируем, при этом внутренние силы TК на рис. 6.4
не показаны, т.к. они взаимно уравновешены. Сила TК на рис. 6.4 не совершает работу при сК const.
В данном случае ковш совершает возможное перемещение (4) вместе со стрелой и происходит выравнивающее возможное перемещение (7) , создаваемое рычажным механизмом.
Записываем уравнение суммы элементарных работ всех сил
рабочего оборудования на возможных перемещениях |
Aie |
0: |
|||||||||||
T c |
с |
( G y |
i.2 |
P |
y |
7.4 |
) (4) P |
( z |
7.4 |
z |
4.1 |
) (4) |
|
с |
i |
2max |
|
1max |
|
|
|
|
|||||
|
|
|
|
MОН (7) 0, |
|
|
|
|
|
(6.11) |
|||
где Gi – силы тяжести звеньев рабочего оборудования; i – номер тела механической системы, i =4, 5, 6, 7; y7.4 , z7.4 – абсолютные координаты режущей кромки ковша; z4.1 – координата шарнира
вращения стрелы.
Из (6.11) определим силу в гидроцилиндрах стрелы:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
|
(7) |
|
|||
T |
( G y |
|
P y |
|
P( z |
|
|
|
z |
|
)) |
|
|
|
M |
|
0. |
(6.12) |
||||||
|
|
|
|
|
|
|
cс |
|
||||||||||||||||
с |
i |
|
i.2 |
|
2 |
7.4 |
|
1 |
7.4 |
|
|
|
4.1 |
|
|
|
ОН |
cс |
|
|||||
В |
уравнении |
(6.12) |
(4) |
|
совпадает с |
формулой (6.3) |
и ее |
|||||||||||||||||
cс |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(7) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
следствием |
(6.4). |
|
Выражение |
|
|
|
|
|
|
|
– |
это |
кинематическая |
|||||||||||
|
|
|
|
cс |
|
|||||||||||||||||||
передаточная функция |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
(7) |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
u (7) |
|
|
. |
|
|
|
|
|
|
(6.13) |
||||||
|
|
|
|
|
|
|
|
cс |
|
|
|
|
|
|
||||||||||
В формуле (6.12) основные силы P1max и P2max учтены, поэтому моментом приведенных сил MОН можно пренебречь, т.к. ковш совершает поступательное криволинейное движение, при котором
(7) 0.
R |
P2max |

 P1max
P1max
Рис. 6.5
поршню гидроцилиндра поворота ковша перемещения рычага (5) и ковша (7) .
Сумма элементарных работ на перемещениях имеет вид Aie 0:
Для определения
силы TК в гидроцилиндрах поворота ковша при подъеме стрелы (рис. 6.5) условно фиксируем перемещение
стрелы: |
задаем |
|
q1 cс const, |
а |
от |
гидроцилиндра ковша как от связи освободимся, заменив ее действия силой реакции TК . Задаем возможное перемещение
cК , возможные угловые
заданных возможных
TК cК G7(y7.2 y4.3) P2max (y7.4 y4.3) P1max ( z7.4 z4.3)
M OН (7) |
0. |
(6.14) |
Из (6.14) определим усилие в гидроцилиндрах поворота ковша:
T |
G7(y7.2 y4.3) P2max(y7.4 y4.3) P1max( z7.4 z4.3) MOH |
. (6.15) |
||
|
||||
К |
cK |
|||
|
|
|||
|
|
(7) |
|
|
Из практики расчета и эксплуатации погрузчиков известно, что в случае черпания материала стрелой возникают большие силы и давления в поршневых полостях гидроцилиндров стрелы и ковша. В результате этого исключается возможность подъема ковша стрелой при черпании. Это является фактором, снижающим производительность погрузчиков традиционной конструкции вследствие увеличения времени копания и снижения коэффициента наполнения ковша [см. формулы (6.12), (6.15)].
6.2. Математическая модель силовых расчетов энергосберегающего рабочего оборудования
Применение принципа уравновешивания сил тяжести рабочего оборудования ковшовой машины не изменило условия работы механизма поворота ковша. Поэтому методика определения силы TК в гидроцилиндрах поворота ковша осталась традиционной [см.
формулы (6.6), (6.15)].
Энергосберегающее рабочее оборудование ковшовой машины (рис. 6.6) отличается использованием уравновешивающего пневмогидроцилиндра в виде силового звена, ограниченного точками 3.9, 4.5 и создающего дополнительную активную силу Т. Поршневая полость пневмогидроцилиндра соединена с газовым баллоном, заряженным воздухом под давлением pПГЦ , которое при подъеме и опускании стрелы остается практически постоянным.

|
|
Усилие |
в |
штоке |
|
|
уравновешивающего |
||||
|
пневмогидроцилиндра |
||||
|
определяется |
|
по |
||
|
формуле |
|
|
|
|
|
|
D2 |
pПГЦ , |
(6.16) |
|
|
|
T |
ПГЦ |
||
|
|
|
4 |
|
|
|
где DПГЦ – диаметр |
||||
|
пневмогидроцилиндра; |
||||
|
pПГЦ |
– |
давление в |
||
Рис. 6.6 |
пневмогидроцилиндре |
||||
(газовом баллоне). |
|
||||
В режиме подъема стрелы с грузом в ковше для определения |
|||||
силы Tс в гидроцилиндрах стрелы освободимся от связи и заменим гидроцилиндр силой реакции Tс , приложенной к стреле. В
категорию задаваемых сил введем силу T уравновешивающего пневмогидроцилиндра и силы тяжести Gi всех элементов рабочего оборудования и вес полезного груза в ковше GГР . Обобщенную координату гидроцилиндра поворота ковша q2 зафиксируем, т.е. примем q2 cК const и зададим стреле возможное перемещение по
обобщенной |
координате |
стрелы |
q1 cс. |
Запишем уравнение |
||||||||||
суммы элементарных работ Aie |
0 (см. рис. 6.6): |
|
|
|||||||||||
T c |
с |
T c G y |
i.2 |
(4) |
G |
ГР |
y |
7.2 |
(4) |
M |
K |
(7) 0, |
(6.17) |
|
с |
|
i |
|
|
|
|
|
|
MK – |
|||||
где T – |
сила уравновешивающего |
пневмогидроцилиндра; |
||||||||||||
момент сил инерции на ковше; c – возможное перемещение поршня уравновешивающего пневмогидроцилиндра.
Вданном расчетном случае для рис. 6.6 последним слагаемым в уравнении (6.17) можно пренебречь ввиду малости.
Вслучае полного уравновешивания сил тяжести для порожнего
ковша GГР 0 из (6.17) имеем
T c Gi yi.2 (4) 0.
Откуда сила T , уравновешивающая все силы тяжести, при
которой Tс 0, определяется по формуле

T |
Gi yi.2 |
. |
(6.18) |
|
|||
|
c |
|
|
(4)
В знаменателе выражения (6.18) присутствует функция, геометрический смысл которой есть функция плеча уравновешивающего пневмогидроцилиндра
h |
c |
. |
(6.19) |
|
|||
|
(4) |
|
|
В общем случае при подъеме ковша с грузом силу в гидроцилиндрах стрелы можно определить из уравнения (6.17):
T |
Gi yi.2 GГР y7.2 |
T |
c |
. |
(6.20) |
||
|
|||||||
|
|
||||||
с |
cс |
|
|
cс |
|
||
|
|
|
|
|
|||
(4)
При полном уравновешивании порожнего ковша Tс 0 при
GГР 0.
В уравнении (6.20) производная
|
|
|
|
c |
|
c |
|
(4) |
|
h |
. |
|
(6.21) |
||
|
|
|
|
|
(4) |
|
c |
|
|
||||||
|
|
|
|
c |
с |
|
|
|
h |
|
|
|
|||
|
c |
|
|
|
|
|
с |
|
4 |
|
|
|
|
||
Производная |
|
есть |
функция |
отношения |
плеча |
h |
|||||||||
cс |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
уравновешивающего |
пневмогидроцилиндра |
к |
плечу |
h4 |
|||||||||||
гидроцилиндров стрелы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из формулы (6.20) видно, что сила Tс в гидроцилиндрах при подъеме стрелы и ковша с грузом значительно уменьшается при использовании принципа уравновешивания сил тяжести.
Теперь рассмотрим случай копания грунта ковшом с использованием энергосберегающего рабочего оборудования (рис. 6.7). При копании грунта силы сопротивления внутри ковша приведены к режущей кромке ковша и представлены силами P1max ,
P2max и парой сил с моментом MОН . Для определения силы Tс в гидроцилиндрах подъема стрелы при копании зададим обобщенной координате q1 возможное перемещение q1 cс, а обобщенную
координату q2 зафиксируем, т.е. примем q2 cК const. Возможное перемещение (7) (см. рис. 6.7) является результатом

выравнивающего поворота ковша при элементарном повороте стрелы.
Рис. 6.7
Запишем сумму элементарных работ всех сил механической системы на возможных перемещениях по обобщенной координате q1:
Aie 0: Tс cс T c ( Gi yi.2 P2max y7.4 P1max ( z7.4 z3.7 )) (4)
MОН (7) |
0. |
(6.22) |
Пренебрегая в формуле (6.22) последним слагаемым ввиду малости, определим
T |
Gi yi.2 P2max y7.4 P1max ( z7.4 z3.7) |
T |
c |
. |
(6.23) |
||
|
|||||||
с |
cс |
|
|
cс |
|
||
|
|
|
|
|
|||
(4)
Формула (6.23) является доказательством преимущества энергосберегающего рабочего оборудования погрузчика по сравнению с традиционным рабочим оборудованием при копании грунта и черпании материала. Благодаря уменьшению силы Tc и давления в гидроцилиндрах стрелы появляется возможность преодолевать большие горизонтальные силы при черпании материала. Это является фактором, позволяющим заполнять большой объем материала с большим коэффициентом наполнения ковша, что обеспечивает значительное повышение производительности погрузчика.
Таким образом, погрузчик с энергосберегающим гидроприводом способен подняться на более высокий технический уровень.
6.3. Аналитическое исследование кинематических характеристик гидромеханизма подъема стрелы
В гидравлических механизмах подъема-опускания стрелы современных погрузочно-транспортных стреловых машин используются кривошипно-кулисные механизмы с ведущим поршнем. В технической литературе уделяется недостаточное внимание аналитическому анализу кинематических характеристик этих механизмов. В классе погрузочно-транспортных машин используют в основном две схемы механизма подъема стрелы, отличающиеся расположением ведущего звена – гидроцилиндра 3. На рис. 6.8 ведущее звено 3 расположено поперек стрелы СS в нижнем положении стрелы.
|
|
|
S |
|
|
l4 |
max |
|
h |
|
HmaxS |
|
|
|
|
|
4 |
|
(4) |
|
|
|
|
|
d4 |
C |
|
|
|
||
|
|
z |
|
|
z(3) |
|
Smin |
z |
(1) |
|
|
|
|
H |
|
|
|
α0 |
A |
|
|
z |
|
|
|
|
|
|
|
Рис. 6.8 |
|
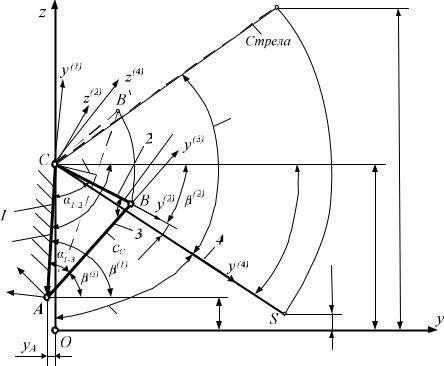
На рис. 6.9 ведущее звено 3 в нижнем положении стрелы расположено под острым углом к стреле СS. Указанные механизмы содержат условно неподвижное звено 1 на портале, положение которого задается в основной системе координат Oyz. Звено 2 жестко

соединено со стрелой СS грузоподъемной машины и совершает с ней |
|||||||||
вращательное движение относительно шарнира C стрелы. Угол |
|||||||||
стрелы (4) |
и угол (2) звена |
2 отличаются на постоянный угол . |
|||||||
Длины АС и СВ сторон кинематического треугольника являются |
|||||||||
постоянными величинами. |
|
|
|
|
|||||
|
|
z |
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Стрела |
|
|
|
|
|
|
|
y(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z(4) |
z(2) |
B |
|
|
|
|
|
|
z(3) |
|
|
|
max |
|
|
|
|
|
|
β(1) |
|
|
|
Smax |
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
z |
(1) |
1 2 |
1 3 |
2 |
β (2) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
d4 A |
4 |
|
|
l4 |
β(3) |
(4) |
|
|
|
yA |
|
cС |
|
C |
|||
|
|
|
3 |
B |
|
|
z |
||
|
|
|
|
|
|
y(3) |
|
A |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
y(2) |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
α0 |
|
y(4) |
S |
y |
|
|
|
|
|
|
|
Smin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
Рис. 6.9 |
|
|
|
При изменении длины звена АВ механизм должен обеспечить |
|||||||||
заданные высоты |
HS min и |
HS max подъема стрелы и многие другие |
|||||||
параметры. |
|
|
|
|
|
|
|
|
|
Таким образом, выбор основных параметров грузоподъемного |
|||||||||
механизма связан с исследованием кинематического треугольника |
|||||||||
АВС. Кулиса 3 представляет собой гидроцилиндр с ведущим |
|||||||||
поршнем. Используя метод векторных замкнутых контуров, |
|||||||||
разработанный И.И. Артоболевским и В.А. Зиновьевым [3], можно |
|||||||||
записать векторное уравнение, в котором первые буквы |
|||||||||
соответствующих векторов являются их началом: |
|
||||||||
AC CB AB. |
(6.24) |

На рис. 6.8 стрелки этих векторов не показаны. Для выполнения кинематического анализа введем обозначения величин: d4 , l4 – соответственно длины сторон АС и СВ кинематического треугольника; длину кулисы АВ, состоящей из двух тел, цилиндра и
поршня, обозначим АВ=cс |
|
|
и |
будем |
рассматривать |
как звено |
|||||
переменной длины, cс =var. |
|
|
|
|
|
|
|
|
|||
Выражение (6.24) можно представить в виде |
|
||||||||||
|
|
|
|
d4 l4 |
cс . |
|
(6.25) |
||||
Векторное уравнение (6.25) равноценно двум алгебраическим |
|||||||||||
уравнениям его проекций на оси y, z: |
|
|
|
||||||||
d |
4 |
cos (1) |
l |
4 |
cos (2) |
c |
cos (3) ; |
(6.26) |
|||
|
|
|
|
|
|
с |
|
|
|||
d |
4 |
sin (1) |
l |
4 |
sin (2) |
c |
sin (3). |
(6.27) |
|||
|
|
|
|
|
|
|
с |
|
|
||
В уравнениях |
|
(6.26), |
(6.27), |
полученных методом |
векторных |
||||||
контуров В.А. Зиновьева [3], неизвестными являются переменные углы (2), (3) . При этом постоянный угол (1) вычисляется предварительно при помощи исходных данных.
Рассмотрим более эффективное решение задачи, не использующее метод замкнутых контуров и уравнения (6.26), (6.27) [15, 67]. Со звеньями механизма свяжем относительные правые системы координат O( j) y( j)z( j) , где j – номер относительной системы координат, совпадающий с номером тела механической системы, j =1,
2, 3, 4. |
|
|
|
|
|
Оси O( j) y( j) этих систем образуют углы ( j) |
с осью Oy основной |
||||
системы координат Oyz. |
|
||||
Длину звена d4 можно определить по формуле аналитической |
|||||
геометрии |
|
||||
d4 |
(yA yc )2 (zA zc )2 |
. |
|
||
Угол (1) можно определить, используя координаты точек А и С: |
|||||
(1) arcsin |
zс zА |
. |
(6.28) |
||
|
|||||
|
|
d4 |
|
||
Углы 1 2, 1 3, определяются по теореме косинусов:
|
|
d2 |
l |
2 |
c2 |
|
|
d2 |
c2 |
l2 |
||
1 2 |
arccos |
4 |
|
4 |
с |
; |
1 3 |
arccos |
4 |
с |
4 |
; |
|
|
|
|
|
|
|
||||||
|
|
|
2d4l4 |
|
|
|
2d4cс |
|||||
|
|
c2 |
l2 |
d2 |
|
|
|
arccos |
с |
4 |
4 |
. |
(6.29) |
|
|
|
|
|||
|
|
|
2cсl4 |
|
||
В уравнениях (6.29) длина переменного звена cс |
изменяется в |
|||||
пределах cсmin cс |
cсmax . |
|
|
|
|
|
Используя рис. 6.8, 6.9, для кинематических треугольников можно записать различные уравнения для углов (2), (4) движения стрелы и звена 2. Рассмотрим некоторые из них. Для вершины А кинематического треугольника имеем
|
|
(1) |
(2) |
|
|
1 2 |
. |
|
|
|
|
|
(6.30) |
|||||
Учитывая сумму углов кинематического треугольника |
|
|||||||||||||||||
из (6.30) определим |
1 2 1 3 , |
|
|
|
|
|
|
|
|
|||||||||
|
(2) |
(1) |
|
|
|
. |
|
|
|
|
|
(6.31) |
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
|
|
||
Изменение угла звена 3 определяется по уравнению |
|
|
||||||||||||||||
|
|
|
(3) (1) |
|
|
. |
|
|
|
|
|
|
(6.32) |
|||||
|
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
|
|
|
||
Используя уравнение (6.31), для стрелы можно записать |
||||||||||||||||||
следующие уравнения углов: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
для рис. 6.8 |
(4) |
(2) |
(1) |
|
|
; |
|
(6.33) |
||||||||||
|
|
|
||||||||||||||||
для рис. 6.9 |
|
|
|
|
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
|
(4) |
(2) |
(1) |
|
|
|
|
|
|
. |
|
(6.34) |
|||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 3 |
|
|
|
|
|
|
Используя уравнения (6.29), запишем выражения (6.33), (6.34) |
||||||||||||||||||
как функции геометрических параметров: |
|
|
|
|
|
|
|
|
|
|
||||||||
для рис. 6.8 |
|
c2 |
l |
2 |
d2 |
|
|
|
|
|
d2 |
c2 |
l2 |
|
|
|||
(4) = (1) |
|
|
|
|
|
|
|
|
||||||||||
arccos |
с |
4 |
4 |
|
arccos |
|
|
4 |
|
с |
4 |
|
; |
(6.35) |
||||
|
2cсl4 |
|
|
|
2d4cс |
|||||||||||||
для рис. 6.9 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
c2 |
l |
2 |
d2 |
|
|
|
|
|
d2 |
c2 |
l2 |
|
|
||||
(4) = (1) |
|
|
|
|
|
|
|
|
||||||||||
arccos |
с |
4 |
4 |
|
arccos |
|
4 |
|
с |
4 |
|
. |
(6.36) |
|||||
|
2cсl4 |
|
|
|
2d4cс |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Наиболее простым уравнением углов для стрелы является |
||||||||||||||||||
уравнение |
|
(4) |
4 1 2 , |
|
|
|
|
|
(6.37) |
|||||||||
|
|
|
|
|
|
|
||||||||||||
где 4 – угол вектора d4 с горизонтальной осью Oy; 1 2 – угол в кинематическом треугольнике.