

2328
.pdfРис. 9.14


Формула (9.73) пригодна только для оценки переходного процесса скорости поршня. Для ускорения а установившееся значение a 0, поэтому необходимы другие оценки этого процесса. Допустимые значения перерегулирования скорости поршня V1 обычно соответствуют 10 30%.
Частота собственных колебаний рабочего оборудования погрузчика
2 ,
T
где Т – период колебательного процесса
Число колебаний nK переходного процесса ускорения и скорости за время регулирования tp не должны превышать nK =1, 2,
а иногда 3–4. Выполненные аналитические исследования позволили установить закономерности влияния параметров гидропривода рабочего оборудования на выходные показатели и качество переходных процессов.
На рис. 9.16 для двух разных значений установившейся скорости движения поршня (1 – V1 0,1 м/с; 2 – V1 0,2 м/с) показаны зависимости ускорения приведенной массы аПР от коэффициента демпфирования д . Для современных динамических систем достаточным коэффициентом демпфирования являетсяд =0,3 0,4. Для сильно задемпфированных систем при д =1,0 ускорение аПР 0.
д
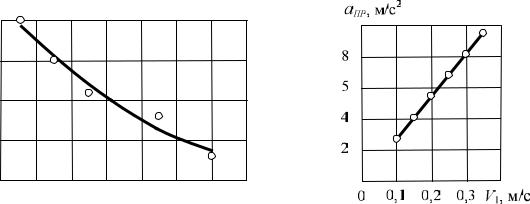
Рис. 9.16 |
Рис. 9.17 |
На рис. 9.17 приведены зависимости влияния коэффициента жесткости СГ на ускорение приведенной массы для двух разных значений установившейся скорости движения поршня (1 – V1 0,1 м/с; 2 – V1 0,2 м/с). Достаточным значением коэффициента
жесткости является СГ 1,54 108 Н/м.
Сувеличением приведенной массы mПР ускорение этой массы
аПР уменьшается (рис. 9.18).
Зависимость ускорения аПР от скорости поршня V1 является практически линейной (рис. 9.19).
аПР, м/с2
0,55
0,5
0,45
0,4
1,2*106 1,6*106 2*106 2,4*106 mпр, кг
Рис. 9.18 |
Рис. 9.19 |

10. АНАЛИТИЧЕСКОЕ ИССЛЕДОВАНИЕ ДИНАМИКИ РАБОЧЕГО ОБОРУДОВАНИЯ В ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССАХ ПОГРУЗЧИКА
10.1. Аналитическое исследование динамики при линейном законе управления распределителем
Исследование динамики рабочего оборудования фронтальных погрузчиков при реальных законах включения золотника выполнено с использованием дифференциального уравнения
|
|
|
|
|
|
2 |
|
|
|
KГ |
|
|
t |
|
|
|
|
|
|
|
|
|
||
|
|
V |
2nV |
V |
mПР |
|
xзол |
tзол |
, |
|
|
|
(10.1) |
|||||||||||
где 2 |
СГ |
; KГ |
|
СГVУСТ tзол |
; |
n д . |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
mПР |
|
xзол |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Аналитическое решение дифференциального уравнения (10.1) |
|
|||||||||||||||||||||||
при линейном включении золотника имеет вид |
|
|
|
|
|
|
|
|||||||||||||||||
|
V e nt С cos t C |
2 |
sin t С |
3 |
С |
t ; |
|
(10.2) |
||||||||||||||||
|
|
|
1 |
|
1 |
|
|
1 |
|
|
|
|
4 |
|
|
|
|
|
|
|||||
|
|
V e nt С |
С n cos t C |
n С sin t С |
4 |
, |
||||||||||||||||||
|
|
|
|
|
2 |
|
1 |
|
|
1 |
|
|
1 |
|
|
|
2 |
|
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.3) |
|||
где – круговая частота затухающих колебаний, |
|
|
|
|||||||||||||||||||||
2 n2 |
. |
|
|
|||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Начальные условия дифференциального уравнения (10.1) имеют вид: при t=0 V0 0; V0 0. Постоянные интегрирования в полученных решениях определяются по выражениям:
С 2 |
дVУСТ |
; С |
|
|
VУСТ |
(2 2 |
1); |
С |
|
|
2 дVУСТ |
; |
С |
4 |
|
VУСТ |
. |
||||
1 |
t |
зол |
2 |
|
t |
зол |
д |
|
|
3 |
|
t |
зол |
|
|
t |
зол |
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.4) |
|||
Операция включения золотника выполняется в течение времени t tзол . В этот период скорость и ускорение изменяются по
формулам (10.2), (10.3) и происходит процесс открытия окон золотника.
После включения золотника правая часть дифференциального уравнения становится постоянной и имеет вид
|
|
2 |
KГ |
|
|
V |
2nV V |
mПР |
xзол. |
(10.5) |
|
Начальные условия в дифференциальном уравнении (10.5) после линейного включения золотника будут отличаться от ранее рассмотренных: при t=0 V V0 ; V V0 . Процесс движения рабочего оборудования совершается при полностью открытых окнах золотника в течение времени t t1 перемещения рабочего оборудования.
После получения требуемого перемещения рабочего оборудования выполняется технологическая операция линейного выключения золотника с использованием дифференциального уравнения
|
K |
Г |
x |
зол |
|
|
t |
|
|
V 2nV 2V |
|
|
1 |
|
|
. |
(10.6) |
||
|
|
|
|
|
|
||||
|
mПР |
|
t |
|
|
|
|||
|
|
зол |
|
||||||
Постоянные величины дифференциального уравнения имеют
вид
|
2 |
|
СГ |
; |
KГ |
|
СГVУСТ |
; |
n Г . |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
mПР |
|
|
|
|
xзол |
|
|
|
|
|
|
|
|
|
|||
Начальные условия уравнения (10.6) имеют вид: при t=0 |
|
|
|||||||||||||||||||
V V ; V V . Время выключения золотника принимаем t t |
зол |
. |
|||||||||||||||||||
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение дифференциального уравнения (10.6) имеет вид |
|
||||||||||||||||||||
|
V e nt С cos t C |
2 |
sin t С |
3 |
С |
t ; |
|
|
(10.7) |
||||||||||||
|
|
|
1 |
|
1 |
|
|
|
1 |
|
|
4 |
|
|
|
|
|
||||
|
V e nt С С n cos t C |
n С sin t С |
4 |
. |
(10.8) |
||||||||||||||||
|
2 |
1 |
1 |
|
|
1 |
|
|
2 |
|
|
1 |
1 |
|
1 |
|
|
|
|||
Принятым начальным условиям соответствуют полученные постоянные интегрирования
|
|
|
|
д |
|
|
|
|
|
V |
С n C |
4 |
|
|||
С V |
V |
(1 2 |
|
|
); |
С |
2 |
|
0 |
1 |
; |
|||||
|
|
|
|
|
|
|||||||||||
1 0 |
УСТ |
|
tзол |
|
|
|
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
С V |
(1 2 |
д |
); |
С |
4 |
|
VУСТ |
. |
(10.9) |
|||||||
|
||||||||||||||||
|
|
|
|
|||||||||||||
3 |
УСТ |
|
tзол |
|
|
|
|
tзол |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Переходный процесс рабочего оборудования при линейном выключении золотника по уравнениям (10.7), (10.8) совершается в течение времени t tзол . В момент полного закрытия окон
золотника происходит процесс затухания колебаний с использованием дифференциального уравнения с нулевой правой частью:
V 2nV 2V 0.
Решение такого уравнения уже рассмотрено (9.69).
На рис. 10.1 представлены результаты исследования качества переходных процессов гидравлического рабочего оборудования погрузчика ПК-3 при линейном законе управления золотником распределителя путем варьирования времени включения и
выключения золотника t var. Из рис. 10.1,а видно, что при
зол
времени включения золотника t 0,05 с переходные процессы
зол
ускорения а и скорости V1 мало отличаются от переходных процессов при ступенчатом управлении (см. рис. 9.12).

α, м/с2 |
|
x |
|
|
|
α, м/с2 |
|
x |
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|||
|
|
V1 |
|
|
|
|
|
|
|
|||
2 |
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
V1 |
|
||||
1 |
|
a |
|
|
|
1 |
|
|
|
|||
0 |
|
|
|
|
|
|
a |
|
|
|||
|
|
|
|
|
t, c |
|
|
|
t, c |
|||
-1 |
0,1 |
0,2 |
0,3 |
0,4 |
0,7 |
0 |
|
|
|
|
||
0,1 |
0,2 |
0,3 |
0,4 |
0,7 |
||||||||
-2 |
|
|
|
|
|
-1 |
||||||
|
|
|
|
|
|
|
|
|
|
|||
-3 |
|
|
|
|
|
-2 |
|
|
|
|
tзол=0,10 c |
|
-4 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
a) |
|
tзол=0,05c |
|
|
|
|
б) |
|
|
|
||
|
α, м/с2 |
|
|
x |
|
|
|
|
α, м/с2 |
|
|
x |
|
|
|
|
2 |
|
|
V1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V1 |
|
|
|
|||
1 |
|
|
|
|
|
|
|
1 |
|
|
a |
|
|
|
||
|
a |
|
|
|
|
|
|
|
|
|
t, c |
|||||
0 |
|
|
|
|
t, c |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
|
|
||||
|
|
|
|
|
|
0,5 |
0,6 |
0,7 |
||||||||
|
|
|
|
|
|
-1 |
||||||||||
-1 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
|||||||||
|
|
|
|
|
tзол=0,20 c |
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
в) |
|
tзол=0,15 c |
|
|
|
|
г) |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
α, м/с2 |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
V1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
|
t, c |
|
|
|
|
|
|
|
|
|||
0,1 |
0,2 |
0,3 |
|
|
|
|
|
|
|
|
|
|
|
|||
-1 |
0,4 |
0,5 |
0,6 |
0,7 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
д) |
|
tзол=0,25c |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 10.1 |
|
|
|
|
|
|
|||
Увеличение времени включения золотника t приводит к
зол
уменьшению ускорения поршня. При максимальном значении
времени включения золотника t 0,25 с ускорение а снизилось
зол
до а=0,8 м/c2, при этом практически исчезло перерегулирование скорости V1. Поэтому возникает важный вывод о том, что увеличение времени включения золотника, т.е. плавное неступенчатое регулирование, является резервом повышения качества переходных процессов фронтальных погрузчиков. Другим важным выводом, вытекающим из представленных результатов исследования, является вывод о том, что при времени включения золотника tзол 0,2 с время регулирования tp практически

совпадает с временем линейного включения золотника tp =tзол . Это
означает, что в случае, когда tp =t |
зол , после включения золотника |
|||
ускорение a 0, а скорость V1 |
приобретает установив- |
|||
шееся значение V1 VУСТ . |
аПР, м/с2 |
|
|
|
На рис. 10.2 показаны |
|
|
|
|
зависимости ускорения aПР |
4 |
|
|
|
|
|
|
||
приведенной массы от |
3 |
|
|
|
времени открытия проходных |
|
|
|
|
|
|
2 |
|
|
окон золотника tзол , кривая 1 |
2 1 |
|
||
|
|
|||
соответствует скорости  поршня V1=0,1 м/с, кривая 2 – 1
поршня V1=0,1 м/с, кривая 2 – 1  скорости поршня V1=0,2 м/с.
скорости поршня V1=0,2 м/с. 
0 0,05 0,1 0,15 0,2 tзол, с
Рис. 10.2
10.2. Исследование качества переходных процессов
гидравлического рабочего оборудования фронтального супертяжелого погрузчика ПК-75
Исследования приведения масс рабочего оборудования для типоразмерного ряда фронтальных погрузчиков показали, что приведенные массы тяжелых погрузчиков имеют громадные величины, составляющие тысячи тонн. Поэтому целесообразно установить влияние приведенных масс на качество переходных процессов ускорения и скорости штока гидромеханизма тяжелого фронтального погрузчика.
На рис. 10.3 показаны переходные процессы ускорения и скорости поршня ПК-75 при разных приведенных массах. Приведенные массы варьировались в реальном диапазоне изменения. При номинальной грузоподъемности погрузчика ПК-75 с грузом в ковше приведенная масса составляет mПР =2400000 кг в горизонтальном положении стрелы. Приведенная масса с грузом в ковше в транспортном положении mПР =1313000 кг.
Переходные процессы на рис. 10.3, выполненные при разных приведенных массах, в указанном диапазоне позволяют сделать важные выводы. Изменение приведенной массы практически не влияет на качественные показатели переходных процессов ускорения и скорости гидромеханизмов рабочего оборудования.