

2328
.pdfУгол 5 в кинематическом треугольнике также определим,
используя теорему косинусов: 5 arccosl52 c52 d52 .
2l5c5
Угол 5 определим, используя сумму углов в кинематическом
треугольнике 5 5 |
5. |
|
|
|
|
|
Угол 5 вектора d5 |
в кинематическом треугольнике в основной |
|||||
системе координат Oyz определим, используя алгоритм (5.3): |
||||||
|
z4.6 z3.10 |
; |
|
y4.6 y3.10 |
; |
|
arcsin |
|
d5 |
arccos |
d5 |
||
если φ'≥0, |
то φ5= φ''; |
если φ' < 0, |
то φ5=−φ''. |
|||
Текущее значение угла (5) тела 5 при плоском движении можно определить из уравнения углов, составленного для вершины 5.1 кинематического треугольника:
(5) 5 |
5 5. |
(5.11) |
Преобразование координат |
точек рычага тела 5 |
из пятой |
относительной системы O(5)y(5)z(5) в основную систему координат Oyz выполним по формулам (5.5) – (5.6):
y5.i y5(5.i) z5.i y5(5.i)
cos (5) z5(5.i) sin (5) z5(5.i)
sin (5) y4.6;
cos (5) z4.6.
Записанные формулы представляют собой математическую модель кинематики плоского движения тела 5.
Для описания плоского движения тела 6 тяги, состоящего из переносного движения тела вместе с полюсом 6.1 и вращательного движения относительно полюса (рис. 5.6), введем следующие исходные данные: координаты и размеры звеньев кинематического треугольника (1), (2), (3) с соответствующими вершинами 5.4, 4.3, 6.3:
y(1)=y5.4; z(1)=z5.4 ; y(2)=y4.3; z(2)= z4.3; |
y(3)=y6(6.3); |
z(3)=z6(6.3). |
Две |
|||||||||||
стороны кинематического треугольника известны: |
cj =с6 ; |
lj =l6. |
||||||||||||
Третья сторона d6 |
фиксированного |
|
|
звена |
кинематического |
|||||||||
треугольника и угол 6 |
определяются по формулам: |
|
d62 l62 c62 |
|
|
|
||||||||
|
|
|
|
6 arccos |
; |
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
2d6l6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
d |
6 |
(y |
y |
4.3 |
)2 (z |
5.4 |
z |
4.3 |
)2 |
||||
|
|
|
5.4 |
|
|
|
|
|
||||||
Угол 6 вектора d6 в

γ6 |
основной системе координат вычисляем по алгоритму (5.7). Угол (6) тела 6 в абсолютной системе координат определяется по уравнению углов, составленному для вершины

 (1):
(1):
(6) 6 6. (5.12)
Рис. 5.6
Преобразование относительных координат точек тела 6 в основную систему координат выполняем по формулам (5.5) – (5.6):
y6.i y6(6.i) cos (6) z6(6.i) sin (6) y5.4 ; z6.i y6(6.i) sin (6) z6(6.i) cos (6) z5.4.
Представленный алгоритм описывает кинематику плоского движения тела 6.
Основное тело рассмотренной системы ковш (тело 7) при выполнении технологических операций выполняет различные движения, основными из которых являются следующие. При неподвижной стреле (4) const, ковш совершает вращательное движение относительно стрелы поворотным механизмом, выполненным при помощи гидроцилиндра поворота ковша, рычага 5 и тяги 6. Если стрела поднимается гидроцилиндрами стрелы c4 var, а гидроцилиндр ковша зафиксирован c5 const, то при подъеме стрелы ковш совершает следящее вращение относительно вершины стрелы, обеспечивая выравнивание положения ковша относительно заданного положения с некоторой неравномерностью регулирования.
При черпании материала ковшом рассмотренные движения ковша сочетаются с поступательным перемещением машины. Рассмотренная методика описания движений не имеет каких-либо упрощающих допущений, поэтому позволяет анализировать следящие свойства сложного рычажного механизма с абсолютной точностью. Методика геометрического анализа позволяет установить

аналитическую связь угла (7) тела 7 с обобщенными координатами: q1 y; q2 c4 и q3 c5 в любом технологическом сочетании.
Для описания движения тела 7 – ковша – используем следующие
исходные |
данные |
|
(рис. 5.7). Для тела 7 |
||
известны |
K |
|
координаты |
||
|
||
шарниров ковша: |
||
y(3) =y6.3; z(3) =z6.3; |
||
y(2) =y4.3; z(2) =z4.3.
Звено |
с6 |
в |
|
|
|
|
|
|
|
|
данном |
случае |
|
|
|
|
|
|
|
|
|
численно и векторно |
|
|
|
Рис. 5.7 |
|
|
||||
совпадает |
|
с |
|
|
|
|
|
|
|
|
фиксированным |
поэтому ось O(7)y(7) |
|
|
|
|
|
|
|||
звеном c6 d7 , |
|
тоже совпадает с этим звеном. |
||||||||
Угол (7) определим, используя алгоритм (5.7): |
|
|
|
|||||||
|
|
|
z4.3 z6.3 |
|
|
|
y4.3 |
y6.3 |
|
|
|
arcsin |
c6 |
; |
arccos |
c6 |
; |
|
|||
|
если φ'≥0, то φ(7)=φ''; |
если φ'<0, то φ(7)=−φ''. |
(5.13) |
|||||||
(7) = 7.
Преобразование относительных координат тела 7 в основную систему координат Oyz выполним по формулам прямого преобразования координат:
y7.i y7(7.i) z7.i y7(7.i)
cos (7) z7(7.i) sin (7) y4.3; sin (7) z7(7.i) cos (7) z4.3.
Рассмотренный метод является геометрическим методом кинематических треугольников, основанным на методе преобразования координат. Угол ковша K характеризует запрокинутое положение заполненного материалом ковша при его транспортном положении. Угол ковша K в любом положении вычисляется по алгоритму как угол вектора, заданного двумя точками 7.5, 7.4 на ноже ковша.

|
dK |
(y7.4 y7.5)2 (z7.4 z7.5)2 |
; |
|
|||
K |
arcsin |
z7.5 z7.4 |
; |
K arccos |
y7.5 |
y7.4 |
; |
|
|
|
|||||
|
|
dK |
|
dK |
|||
если K ≥0, то K = K ; |
если K <0, то K = – K , |
||||||
где dK – длина ножа (расстояние между точками 7.4 и 7.5).
5.3. Методика позиционирования и выбора параметров рабочего оборудования традиционных погрузчиков и с энергосберегающим гидроприводом
Основными механизмами рабочего оборудования фронтального погрузчика являются грузоподъемный механизм, механизм управления ковшом и энергосберегающий механизм. Все расчеты механизмов обычно разделяются на три вида: кинематические, силовые, динамические. Кинематические расчеты обеспечивают технологические функции рабочего оборудования. Силовые расчеты определяют прочностные характеристики механизмов, динамические расчеты необходимы для определения длительности элементов технологического цикла с целью определения производительности машины.
Рассмотрим методику выбора параметров механизмов рабочего оборудования погрузчика четвертой размерной группы (ПК-4) грузоподъемностью QП =3,8 т (рис. 5.8, табл. 5.1).
z |
600 |






 550
550 



 lП =1000
lП =1000

HП


 420
420
z(7)
y
2850 y(7)
Рис. 5.8
Проектирование механизмов рабочего оборудования начинается с выбора длины стрелы Lc , определения высоты погрузки HП и вылета ковша lП по соответствующим корреляционным функциям (4.3), (4.5), (4.6). Для погрузчика ПК-4 принимаем следующие значения этих параметров: Lc =2,79 м; HП =3,1 м; lП =1,0 м. Для заданной грузоподъемности погрузчика QП =4 т необходимо определить номинальную вместимость и основные геометрические параметры ковша. Внутренняя ширина ковша B0 определяется по формуле
B0 BГ b,
где BГ – габаритная ширина ковша, определяемая по табл. 1.2.
Для погрузчика ПК-4 с габаритной шириной ковша BГ =3,61 м находим внутреннюю ширину ковша Bo=3,57 м. Принимая объемную
насыпную |
плотность |
материала |
M =2 т/м3, |
определим |
|||||||
геометрический номинальный объем ковша: VГ |
QП |
=2 м3. Площадь |
|||||||||
M |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
номинального сечения |
ковша |
определяется |
по |
формуле |
|||||||
AK |
VГ |
|
|
2 |
=0,56м2 . |
|
|
|
|
|
|
Bo |
3,57 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
Для |
обеспечения требуемого сечения ковша |
нужно принять |
|||||||||
систему геометрических параметров, рассмотренных в разделе 2,
табл. 2.7.
|
|
Принимаются следующие параметры ковша: ro=0,43 м; l1=0,501 |
||||||||
м; |
l |
2 |
=0,424 м; b=1,151 м; h =0,262 м; |
|
o |
45o . Площади сечений |
||||
|
|
|
4 |
|
|
|
|
|
||
элементов ковша A1, A2, A3 , A4 (рис. 5.9) имеют следующие |
||||||||||
величины: A 0,218 м2 ; |
A 0,108 м2 ; |
A 0,091 м2 ; |
A 0,151 м2 . |
|||||||
|
|
|
1 |
2 |
3 |
|
|
|
4 |
|
Площадь сечения ковша, равная сумме |
площадей |
его элементов |
||||||||
A |
0,567 м2 , обеспечивается при радиусе ковша r |
o |
=0,43 м. |
|||||||
K |
|
|
|
|
|
|
|
|
|
|
|
|
Вырывное плечо RB |
– расстояние от шарнира 7.1 соединения |
|||||||
ковша со стрелой до точки 7.4 ковша – определяется по формуле (2.56) RB =1,12 м. В нижнем предельном положении стрелы расстояние от шарнира вершины стрелы до опорной поверхности (см.

рис. 4.1) определяется по формуле |
(4.1). |
Принимая |
zСТР zУСТ , |
|||||||
получим |
|
|
|
zСТР 0,098 |
М. |
ДЛЯ |
||||
|
|
|
7.8 |
7.9 |
||||||
α0 |
|
|
|
ПОГРУЗЧИКА |
РАЗМЕР |
|||||
|
|
|
zK |
(СМ. РИС. |
5.9) |
РАВЕН |
||||
|
|
7.7 |
A3 |
|
|
|||||
A4 |
b |
СУММЕ НАЙДЕННЫХ |
||||||||
7.3 |
|
|
|
|||||||
|
A1 |
|
h4 |
|
ВЕЛИЧИН: |
|
|
|||
|
|
|
|
|
|
|||||
|
|
180-γ |
|
7.2 |
|
z(7) zK |
zСТР zУСТ |
0,196 М. |
||
γ0 |
|
|
|
α0 |
|
ТАКИМ |
ОБРАЗОМ, |
7.1 |
|
RВ A2 |
|
ПОЛОЖЕНИЕ ШАРНИРА |
|||
|
y(7) |
7.6 |
7.5 |
7.10 |
КОВША |
7.1 |
|
|
7.4 |
ОТНОСИТЕЛЬНО |
|||||
|
|
|
|
|
|||
|
Рис. 5.9 |
|
|
|
СЕЧЕНИЯ ОПРЕДЕЛЕНО |
||
|
|
|
|
|
ДВУМЯ ВЕЛИЧИНАМИ: |
||
|
|
|
|
|
ВЫРЫВНЫМ |
ПЛЕЧОМ |
|
|
|
|
|
|
RB |
И |
РАЗМЕРОМ |
|
|
|
|
|
КОВША zK . ОСЬ |
||
Oz(7) ковша расположена под углом 0 к плоскости днища. Угол 0
для погрузчика ПК-4 приняли положительным: 0 7,5o . Положение шарнира 7.3 ковша на оси O(7) y(7) определяется величиной расстояния между шарнирами по формуле (2.57), которой соответствует зависимость, приведенная на рис. 2.17.
Для погрузчика грузоподъемностью QП =3,8 т принимаем величину l7.1 7.3 0,41 м. Далее необходимо определить и задать размеры плеч рычага 5, длину тяги 6 ковша 7 (см. рис. 5.1). Корреляционные связи этих величин для типоразмерного ряда установлены в функции длины стрелы Lc погрузчика (табл. 5.1).
Таблица 5.1
Параметры механизма управления ковшом для типоразмерного ряда пневмоколесных фронтальных погрузчиков
|
Грузо- |
|
Координаты |
|
|
|
Расстояние |
||
Тип |
Длина |
точки 4.6 |
Плечи рычага, |
Длина |
|||||
погруз- |
подъ- |
стрелы |
рычага на |
мм |
тяги, |
между |
|||
емность |
|||||||||
чика |
|
LC , мм |
стреле, мм |
|
|
мм |
шарнирами |
||
QП , т |
(4) |
(4) |
верхнее |
нижнее |
ковша, мм |
||||
|
|
|
|||||||
|
|
|
y4.6 |
z4.6 |
|
|
|||
ПК-0,5 |
0,5 |
1830 |
1080 |
220 |
410 |
535 |
350 |
210 |
|

ПК-2 |
2,2 |
2285 |
1359 |
340 |
530 |
790 |
554 |
380 |
ПК-3 |
3,3 |
2330 |
1450 |
360 |
595 |
785 |
460 |
330 |
ПК-4 |
3,8 |
2790 |
1767 |
465 |
636 |
884 |
615 |
410 |
ПК-4 |
4,0 |
3010 |
1868 |
459 |
715 |
817 |
837 |
439 |
ПК-7 |
6,6 |
3185 |
1937 |
530 |
895 |
900 |
845 |
442 |
ПК-7 |
7,2 |
3380 |
1890 |
585 |
945 |
1250 |
740 |
450 |
ПК-15 |
15,0 |
4440 |
2250 |
1410 |
980 |
1439 |
1890 |
800 |
ПК-30 |
30,0 |
6400 |
3970 |
2240 |
1560 |
2132 |
2440 |
1300 |
ПК-45 |
45,0 |
7116 |
4570 |
2300 |
1605 |
2683 |
2443 |
1500 |
ПК-60 |
60,0 |
7880 |
4700 |
2420 |
1767 |
3018 |
2819 |
1554 |
ПК-75 |
75,0 |
8750 |
4940 |
2660 |
1960 |
3080 |
3120 |
1640 |
В табл. 5.2 для типоразмерного ряда погрузчиков показаны относительные горизонтальная и вертикальная координаты шарнира
соединения |
рычага |
со |
стрелой: |
|
У. |
Р |
y(4) |
L ; |
|
Z.Р |
z(4) |
L . |
|
|
|
|
|
|
|
4.6 |
с |
|
4.6 |
с |
|||
Показаны |
также относительные |
длины |
|
плеч |
рычага: r.1 r1 |
Lс ; |
|||||||
r.2 r2 Lс ; |
относительная |
длина |
тяги: |
|
T lТ |
Lс ; |
относительное |
||||||
расстояние между шарнирами ковша: K |
l7.1 7.3 |
Lc . |
|
|
|
|
|||||||
По данным табл. |
5.2 |
сделаны |
выводы. Увеличение |
размеров |
|||||||||
машин сопровождается увеличением размеров стрелы и рычага поворота ковша. Общей закономерностью является изменение линейных размеров машин в степени 1 3 от грузоподъемности погрузчика. При соблюдении условий теории подобия относительные геометрические параметры механизмов являются постоянными величинами.
3 от грузоподъемности погрузчика. При соблюдении условий теории подобия относительные геометрические параметры механизмов являются постоянными величинами.
Для механизма поворота ковша фронтального погрузчика с увеличением грузоподъемности появляется необходимость рычаг поворота ковша поднять в перекрестной схеме поворота относительно переднего моста, т.к. разместить рычаг поворота между ковшом и передним мостом становится затруднительно.
Таблица 5.2
Относительные параметры механизма управления ковшом для типоразмерного ряда пневмоколесных фронтальных погрузчиков
Грузо- |
|
Относительные |
Относитель- |
Относи- |
Относительное |
|||
подъ- |
Длина |
координаты |
ные плечи |
расстояние |
||||
ем- |
стрелы |
|
|
|
|
тельная |
между |
|
(4) |
(4) |
верх- |
ниж- |
|||||
длина тяги |
||||||||
ность |
LC , мм |
y4.6/LC |
z4.6/LC |
нее |
нее |
шарнирами |
||
QП , т |
|
Y.P |
Z.P |
r.1 |
r.2 |
T |
ковша K |
|
|
|
|||||||

0,5 |
1830 |
0,590 |
0,120 |
0,224 |
0,292 |
0,191 |
0,115 |
2,2 |
2285 |
0,594 |
0,149 |
0,232 |
0,346 |
0,242 |
0,166 |
3,3 |
2330 |
0,622 |
0,155 |
0,255 |
0,337 |
0,197 |
0,142 |
3,8 |
2790 |
0,633 |
0,167 |
0,228 |
0,317 |
0,220 |
0,140 |
4,0 |
3010 |
0,620 |
0,152 |
0,238 |
0,271 |
0,278 |
0,145 |
6,6 |
3185 |
0,608 |
0,166 |
0,281 |
0,283 |
0,265 |
0,139 |
7,2 |
3380 |
0,559 |
0,173 |
0,280 |
0,370 |
0,219 |
0,133 |
15,0 |
4440 |
0,506 |
0,318 |
0,221 |
0,324 |
0,426 |
0,180 |
30,0 |
6400 |
0,620 |
0,350 |
0,244 |
0,333 |
0,381 |
0,203 |
45,0 |
7116 |
0,642 |
0,323 |
0,225 |
0,377 |
0,343 |
0,211 |
60,0 |
7880 |
0,596 |
0,307 |
0,224 |
0,383 |
0,358 |
0,197 |
75,0 |
8750 |
0,565 |
0,304 |
0,224 |
0,352 |
0,357 |
0,187 |
В этом случае относительные величины механизма поворота ковша являются некоторыми функциями, зависящими от параметров машины, например грузоподъемности погрузчика QП .
Из табл. 5.2 видно, что координата y4(4).6 шарнира соединения рычага со стрелой практически является константой. При этом вертикальная координата увеличивается более чем в 2 раза. Относительная длина верхнего плеча рычага поворота ковша r1 Lc остается практически константой, при этом относительная длина нижнего плеча r2
Lc остается практически константой, при этом относительная длина нижнего плеча r2  Lc несколько возрастает. С увеличением грузоподъемности увеличивается относительное расстояние между шарнирами ковша l 7.1 7.3
Lc несколько возрастает. С увеличением грузоподъемности увеличивается относительное расстояние между шарнирами ковша l 7.1 7.3 Lc . Причина этого явления заключается в значительном изменении условий работы тяжелых погрузчиков (прочные грунты и материалы). На рис. 5.10 показана зависимость относительного расстояния между шарнирами ковша l 7.1 7.3
Lc . Причина этого явления заключается в значительном изменении условий работы тяжелых погрузчиков (прочные грунты и материалы). На рис. 5.10 показана зависимость относительного расстояния между шарнирами ковша l 7.1 7.3 Lc от грузоподъемности QП . Размеры звеньев механизма управления ковшом используем для моделирования положений рабочего оборудования и ковша во всех рабочих позициях и определения параметров движения звеньев рабочего оборудования фронтального
Lc от грузоподъемности QП . Размеры звеньев механизма управления ковшом используем для моделирования положений рабочего оборудования и ковша во всех рабочих позициях и определения параметров движения звеньев рабочего оборудования фронтального 
 погрузчика. Одной из главных задач
погрузчика. Одной из главных задач
проектирования |
является определение |
|
пределов |
изменения |
длин |
гидроцилиндров |
управления |
ковшом |
c5min , c5max. |
Рассмотрим |
методику |
решения этой задачи с использованием
программы «Компас» или AUTOCAD. |
Рис. 5.10 |
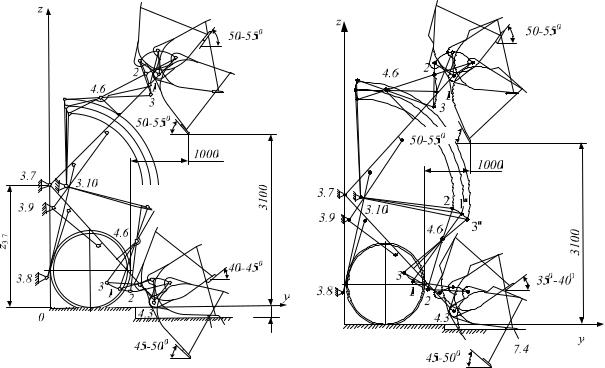
Выполним сборку стрелы,
рычага, тяги и ковша в системе координат Оyz на рис. 5.11.
|
|
|
3 |
|
|
1 |
|
3 |
|
1 |
|
2 |
|
|
|
|
2 |
2 1
1
 3
3
7.8
7.8
7.5 7.4 

 7.5
7.5
Рис. 5.11
Рис. 5.12
Стрелу подсоединяем к порталу в шарнире 3.7, имеющему координату z3.7 в основной системе координат Оyz. В нижнем
предельном положении вершина стрелы 4.3 находится над опорной поверхностью на высоте z4.3 zСТР. . К стреле, показанной в нижнем
предельном положении, подсоединяем ковш в трех положениях.
В первом положении ковш устанавливается днищем на уступе,
т.е. ниже опорной поверхности и параллельно ей на величину z |
. Во |
||||||
|
|
|
|
|
|
УСТ |
|
втором |
положении |
ковш |
запрокинут |
под |
углом K |
40 45o, в |
|
третьем |
положении |
ковш |
опрокинут |
для |
разгрузки |
под |
углом |
K (45 50o). Далее стрела устанавливается в верхнее предельное положение таким образом, чтобы обеспечить высоту погрузки
HП =3100 мм и угол разгрузки ковша K (50 55o). К вершине стрелы в верхнем положении присоединяем ковш в трех положениях: в горизонтальном положении угол ковша K 0, в запрокинутом и
разгруженном положении угол ковша K 50 55o . Известны рациональные значения углов ковша в указанных положениях.
В табл. 5.3 приведены минимальные значения углов разгрузки ковша для разных видов материалов [77]. Задавать углы
опрокидывания (разгрузки) ковша больше 50o нецелесообразно, т.к. это приводит к снижению производительности погрузчика вследствие увеличения длительности элементов рабочего процесса, которые пропорциональны величине угла поворота ковша. Угол опрокидывания (разгрузки) ковша для стрелы вверху задаем
K 50o.
|
|
Таблица 5.3 |
|
Зависимость угла разгрузки ковша от вида материала |
|||
|
|
|
|
Грунт, материал |
Влажность, % |
Минимальный угол |
|
разгрузки min , град |
|||
|
|
||
Песок |
5-7 |
25-30 |
|
Супесь |
8-12 |
30-35 |
|
Щебень |
– |
30-35 |
|
Суглинок |
12-17 |
30-35 |
|
Отсев |
10-15 |
30-40 |
|
Глина, суглинок |
20-25 |
>40 |
|
К стреле вверху подсоединяем рычаг в шарнире 4.6 стрелы, при этом нижний шарнир рычага соединяем тягой с шарниром ковша для трех положений ковша и рычага. Эту же операцию выполняем для стрелы внизу (см. рис. 5.11). Для стрелы вверху и внизу реализуется одно конкретное значение угла ковша из заданных диапазонов, которое конструктор рассматривает по своему убеждению как рациональное значение. В результате для стрелы внизу и вверху имеем точки 1, 2, 3, определяющие положение рычага для разных положений ковша. Найденным нижним точкам рычага 1, 2, 3 соответствуют точки для верхнего плеча рычага. Вверху это точки 1 , 2 , 3 , внизу точки 1 , 2 , 3 . Теперь становится возможным определить положение точки 3.10 шарнира гидроцилиндра управления ковшом и определить длины гидроцилиндров ковша c5min , c5max. Для решения этой задачи необходимо для точек 1 , 1
подобрать радиус окружности с центром в точке 3.10, который определяет горизонтальное положение передней стенки ковша в верхнем и нижнем положениях стрелы. Через точки 2 , 2 из центра