

2328
.pdf3.10 проводим дугу окружности, которая определяет минимальную длину гидроцилиндра ковша c5=c5min , а дуга, проходящая через
точки 3 , 3 , соответствует максимальной длине гидроцилиндра ковша c5=c5max. Положение точки 2 рычага в верхнем положении
стрелы для опрокинутого ковша обычно соответствует расположению нижнего плеча рычага и тяги ковша на одной линии с шарниром опрокинутого ковша. При этом точка 2 в нижнем положении стрелы
соответствует опрокинутому ковшу с углом K (45 50o).
На рис. 5.11 рассмотрен механизм поворота ковша с прямым рычагом, для которого точки 1, 2, 3 рычага при опущенной стреле расположены между ковшом и передним мостом. На рис. 5.12 рассмотрен вариант погрузчика ПК-4, у которого рычаг поднят вверх
относительно стрелы путем увеличения координаты z4(4.6) шарнира 4.6
соеди- |
|
|
|
|
|
|
|
|
|
|
нения рычага со стрелой. |
|
|
|
|
|
|||||
В этом варианте погрузчика |
|
|
|
|||||||
ПК-4 |
увеличивается |
длина |
|
|
|
|||||
гидроцилиндра |
поворота |
ковша |
|
|
|
|||||
c5min , c5max. При этом на рис. 5.13 |
3 |
|
|
|||||||
|
|
|
||||||||
благодаря |
применению |
кривого |
1 |
|
|
|||||
|
|
|
||||||||
рычага |
удалось |
исправить |
этот |
2 |
|
|
||||
|
|
|
||||||||
недостаток. |
|
|
В |
программе |
|
|
|
|||
используются |
|
относительные |
2 |
1 |
|
|||||
координаты |
портала |
(тела |
3), |
|||||||
|
|
|
|
|
|
|
|
|
|
3 |
стрелы (тела 4), рычага (тела 5), |
|
|
||||||||
|
|
|
||||||||
тяги (тела 6) и ковша (тела 7). |
|
|
|
|||||||
Рассматривается |
прямой |
рычаг |
|
|
|
|||||
поворота (табл. 5.4) и механизм с |
|
|
|
|||||||
кривым рычагом поворота ковша |
|
|
|
|||||||
(табл. 5.5). В табл. 5.4, 5.5 |
|
|
|
|||||||
приведены исходные данные для |
|
|
|
|||||||
моделирования |
|
положений |
|
|
|
|||||
рабочего |
|
|
оборудования |
Рис. 5.13 |
||||||
погрузчика ПК-4. |
|
|
|
|
|
|
||||
Таблица 5.4
Исходные данные к программе позиционирования положений стрелы и ковша погрузчика ПК-4 традиционной конструкции
Номе |
Абсолютные |
|
Относительные координаты, мм |
|
|
|||||||
координаты, |
|
|
|
|||||||||
р точ- |
|
|
|
|||||||||
ки |
|
мм |
|
|
|
|
|
|
|
|
|
|
Тело 3 |
Тело 3 |
Тело 4 |
Тело 4 |
Тело 5 |
Тело 5 |
Тело 6 |
Тело 6 |
Тело 7 |
Тело 7 |
|||
на |
портал |
портал |
стрела |
стрела |
рычаг |
рычаг |
тяга |
тяга |
|
ковш |
ковш |
|
теле |
|
|||||||||||
Y |
|
Z |
Y |
Z |
Y |
Z |
Y |
Z |
|
Y |
Z |
|
|
|
|
||||||||||
1 |
– |
|
– |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
2 |
– |
|
– |
1240 |
310 |
-124 |
0 |
308 |
0 |
|
-200 |
530 |
3 |
– |
|
– |
2790 |
0 |
636 |
0 |
615 |
0 |
|
-390 |
0 |
4 |
– |
|
– |
574 |
-56 |
-884 |
0 |
– |
– |
|
370 |
1110 |
5 |
1800 |
|
0 |
1380 |
-68 |
– |
– |
– |
– |
|
320 |
760 |
6 |
1800 |
|
1540 |
1767 |
465 |
– |
– |
– |
– |
|
– |
– |
7 |
0 |
|
2190 |
– |
– |
– |
– |
– |
– |
|
– |
– |
8 |
-45 |
|
535 |
– |
– |
– |
– |
– |
– |
|
– |
– |
9 |
70 |
|
1755 |
– |
– |
– |
– |
– |
– |
|
– |
– |
10 |
330 |
|
2190 |
– |
– |
– |
– |
– |
– |
|
– |
– |
Таблица 5.5
Исходные данные к программе позиционирования положений стрелы и ковша погрузчика ПК-4 с кривым рычагом, поднятым вверх относительно стрелы
Номе |
Абсолютные |
|
|
|
|
|
|
|
|
|
||
координаты, |
|
Относительные координаты, мм |
|
|
||||||||
р точ- |
|
|
|
|||||||||
ки |
|
мм |
|
|
|
|
|
|
|
|
|
|
Тело 3 |
Тело 3 |
Тело 4 |
Тело 4 |
Тело 5 |
Тело 5 |
Тело 6 |
Тело 6 |
Тело 7 |
Тело 7 |
|||
на |
портал |
портал |
стрела |
стрела |
рычаг |
рычаг |
тяга |
тяга |
|
ковш |
ковш |
|
теле |
|
|||||||||||
Y |
|
Z |
Y |
Z |
Y |
Z |
Y |
Z |
|
Y |
Z |
|
|
|
|
||||||||||
1 |
– |
|
– |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
2 |
– |
|
– |
1240 |
310 |
-180 |
0 |
308 |
0 |
|
-200 |
530 |
3 |
– |
|
– |
2790 |
0 |
550 |
0 |
763 |
0 |
|
-390 |
0 |
4 |
– |
|
– |
574 |
-56 |
-775 |
445 |
– |
– |
|
370 |
1110 |
5 |
1800 |
|
0 |
1380 |
-68 |
– |
– |
– |
– |
|
320 |
760 |
6 |
1800 |
|
1540 |
1767 |
720 |
– |
– |
– |
– |
|
– |
– |
7 |
0 |
|
2190 |
– |
– |
– |
– |
– |
– |
|
– |
– |
8 |
-45 |
|
535 |
– |
– |
– |
– |
– |
– |
|
– |
– |
9 |
70 |
|
1755 |
– |
– |
– |
– |
– |
– |
|
– |
– |
10 |
279 |
|
2143,8 |
– |
– |
– |
– |
– |
– |
|
– |
– |
Путем варьирования длин гидроцилиндров стрелы в диапазоне и длин гидроцилиндров ковша в диапазоне вычисляются углы стрелы, рычага, тяги и ковша;
определяются абсолютные координаты точек рабочего оборудования для 16-ти технологически важных основных положений стрелы и ковша, которые являются результатом задачи позиционирования рабочего оборудования.
В табл. 5.6, 5.7 представлены результаты имитационного математического моделирования шестнадцати положений стрелы и ковша для вариантов рабочего оборудования погрузчика ПК-4.
Таблица 5.6
Результаты позиционирования положений стрелы и ковша для энергосберегающего погрузчика ПК-4
|
|
Длина |
Длина |
Длина |
Угол |
Угол |
|
|
|
энерго- |
|
||||
Характеристика положений стрелы |
г/ц |
г/ц |
сберегаю- |
стрелы |
ковша |
|
|
|
и ковша |
стрелы |
ковша |
щего |
c , |
K , |
|
|
|
c4 , мм |
c5, мм |
пневмог/ц |
град |
град |
|
|
|
|
|
c, мм |
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1. |
Стрела максимально опущена, |
1250 |
1484 |
1023 |
-48,3 |
0,0 |
|
днище ковша на уступе |
|
||||||
|
|
|
|
|
|
||
2. |
Стрела максимально опущена, |
1250 |
1667 |
1023 |
-48,3 |
36,7 |
|
ковш на уступе запрокинут |
|
||||||
|
|
|
|
|
|
||
3. |
Стрела максимально опущена, |
1250 |
1200 |
1023 |
-48,3 |
-73,6 |
|
ковш на уступе опрокинут |
|
||||||
|
|
|
|
|
|
||
4. |
Стрела внизу в промежуточном |
1515 |
1667 |
1207 |
-20,0 |
65,8 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
5. |
Стрела внизу в промежуточном |
1515 |
1200 |
1207 |
-20,0 |
-45,0 |
|
положении, ковш опрокинут |
|
||||||
|
|
|
|
|
|
||
6. |
Стрела в горизонтальном |
1715 |
1667 |
1361 |
0,0 |
71,3 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
7. |
Стрела в горизонтальном |
1715 |
1200 |
1361 |
0,0 |
-54,9 |
|
положении, ковш опрокинут |
|
||||||
|
|
|
|
|
|
||
8. |
Стрела вверху в промежуточном |
1897 |
1667 |
1508 |
20,0 |
73,9 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
9. |
Стрела вверху в промежуточном |
1897 |
1200 |
1508 |
20,0 |
-81,4 |
|
положении, ковш опрокинут |
|
||||||
|
|
|
|
|
|
||
10. Стрела максимально поднята, |
2080 |
1484 |
1663 |
45,0 |
0,0 |
|
|
днище ковша горизонтальное |
|
||||||
|
|
|
|
|
|
||
11. Стрела максимально поднята, |
2080 |
1667 |
1663 |
45,0 |
72,8 |
|
|
ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
|
|
|
|
Окончание табл. 5.6 |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
12. Стрела максимально поднята, |
2080 |
1200 |
1663 |
45,0 |
-47,5 |
|
|
ковш опрокинут |
|
|
|
|
|
||
13. |
Стрела и ковш в положении |
1299,38 |
1404 |
1055 |
-42,5 |
-7,0 |
|
начала копания (угол ковша 7o) |
|||||||
|
|
|
|
|
|||
14. |
Стрела в положении начала |
1299,38 |
1667 |
1055 |
-42,5 |
45,4 |
|
копания, ковш запрокинут |
|||||||
|
|
|
|
|
|||
15. |
Стрела в положении начала |
1299,38 |
1200 |
1055 |
-42,5 |
-63,9 |
|
копания, ковш опрокинут |
|||||||
|
|
|
|
|
|||
16. |
Транспортное положение стрелы |
1495 |
1667 |
1193 |
-22,0 |
64,9 |
|
и ковша (угол въезда 20o ) |
|||||||
|
|
|
|
|
|||
Схемы рабочего оборудования с кривым рычагом поворота ковша реализуются на практике на существующих тяжелых погрузчиках ПК-15, ПК-30.
Таблица 5.7
Результаты позиционирования положений стрелы и ковша для энергосберегающего погрузчика ПК-4 с кривым рычагом, поднятым
вверх относительно стрелы
|
|
Длина |
Длина |
Длина |
Угол |
Угол |
|
|
|
энерго- |
|
||||
Характеристика положений стрелы |
г/ц |
г/ц |
сберегаю- |
стрелы |
ковша |
|
|
|
и ковша |
стрелы |
ковша |
щего |
c, |
K , |
|
|
|
c4 , мм |
c5, мм |
пневмог/ц |
град |
град |
|
|
|
|
|
c, мм |
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1. |
Стрела максимально опущена, |
1250 |
1605,6 |
1023 |
-48,3 |
0,0 |
|
днище ковша на уступе |
|
||||||
|
|
|
|
|
|
||
2. |
Стрела максимально опущена, |
1250 |
1702 |
1023 |
-48,3 |
40,9 |
|
ковш на уступе запрокинут |
|
||||||
|
|
|
|
|
|
||
3. |
Стрела максимально опущена, |
1250 |
1385 |
1023 |
-48,3 |
-51,6 |
|
ковш на уступе опрокинут |
|
||||||
|
|
|
|
|
|
||
4. |
Стрела внизу в промежуточном |
1515 |
1702 |
1207 |
-20,0 |
44,2 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
5. |
Стрела внизу в промежуточном |
1515 |
1385 |
1207 |
-20,0 |
-35,0 |
|
положении, ковш опрокинут |
|
||||||
|
|
|
|
|
|
||
6. |
Стрела в горизонтальном |
1715 |
1702 |
1361 |
0,0 |
45,7 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
7. |
Стрела в горизонтальном |
1715 |
1385 |
1361 |
0,0 |
-41,8 |
|
положении, ковш опрокинут |
|
||||||
|
|
|
|
|
|
||
8. |
Стрела вверху в промежуточном |
1897 |
1702 |
1508 |
20,0 |
45,9 |
|
положении, ковш запрокинут |
|
||||||
|
|
|
|
|
|
||
|
|
|
|
Окончание табл. 5.7 |
|||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
9. |
Стрела вверху в промежуточном |
1897 |
1385 |
1508 |
20,0 |
-81,5 |
|

положении, ковш опрокинут |
|
|
|
|
|
||
10. |
Стрела максимально поднята, |
2080 |
1605,6 |
1663 |
45,0 |
0,0 |
|
днище ковша горизонтальное |
|||||||
|
|
|
|
|
|||
11. |
Стрела максимально поднята, |
2080 |
1702 |
1663 |
45,0 |
41,3 |
|
ковш запрокинут |
|||||||
|
|
|
|
|
|||
12. |
Стрела максимально поднята, |
2080 |
1385 |
1663 |
45,0 |
-78,1 |
|
ковш опрокинут |
|||||||
|
|
|
|
|
|||
13. |
Стрела и ковш в положении |
1299 |
1550 |
1055 |
-42,5 |
-7,0 |
|
начала копания (угол ковша 7o) |
|||||||
|
|
|
|
|
|||
14. |
Стрела в положении начала |
1299 |
1702 |
1055 |
-42,5 |
42,7 |
|
копания, ковш запрокинут |
|||||||
|
|
|
|
|
|||
15. |
Стрела в положении начала |
1299 |
1385 |
1055 |
-42,5 |
-46,2 |
|
копания, ковш опрокинут |
|||||||
|
|
|
|
|
|||
16. |
Транспортное положение стрелы |
1495 |
1702 |
1193 |
-22,0 |
44,1 |
|
и ковша (угол въезда 20o ) |
|||||||
|
|
|
|
|
|||
6. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИЛОВЫХ РАСЧЕТОВ РАБОЧЕГО ОБОРУДОВАНИЯ, ОСНОВАННОЕ НА МЕТОДАХ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
6.1. Математическая модель силовых расчетов механизмов рабочего оборудования
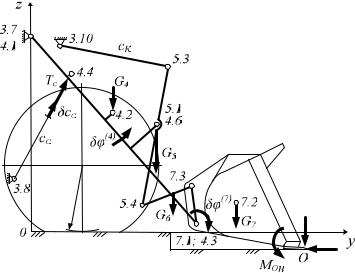
На рис. 6.1 показано рабочее оборудование управления ковшом фронтального погрузчика, представляющее собой, по меньшей мере, систему с тремя степенями подвижности.
Рис. 6.1
Ковш в общем случае совершает горизонтальное поступательное перемещение при помощи колесного ходового механизма 1. Стрела обеспечивает ковшу второе переносное вращательное движение гидроцилиндром 8. Одновременно ковш совершает вращение относительно стрелы гидроцилиндром 9 при помощи рычага 5 и тяги 6. Рычажная система управления ковшом получила название
выравнивающий механизм.
Для выполнения силовых расчетов используем методы аналитической механики. На первом этапе силового расчета исключим горизонтальное поступательное движение ковша вместе с погрузчиком.
Обобщенную координату q поступательного движения примем равной нулю. При заданном условии обобщенными координатами рабочего оборудования являются длины гидроцилиндров подъема стрелы q1 cс и гидроцилиндра поворота ковша q2 cК , где cс , cК – длины гидроцилиндров стрелы и ковша, рассматриваемые как варьируемые величины. Сначала рассмотрим перемещение ковша стрелой с учетом сил тяжести стрелы G4 , рычага G5, тяги G6, ковша
G7 , полезного груза в ковше GГР.
Особенность постановки задачи аналитического силового расчета механизма состоит в том, что при помощи разработанной математической модели определяются положения всех звеньев этого механизма и его координаты в функции обобщенных координат cс , cК . Для определения силы Tс в гидроцилиндрах подъема стрелы используем принцип освобождаемости от связей и заменяем связь соответствующей реакцией Tс , приложенной в шарнире 4.4 стрелы (см. рис. 6.1). При этом обобщенная координата q2 фиксируется: q2 cК const. Задаем обобщенной координате q1 возможное перемещение сс в виде перемещения поршня в гидроцилиндре стрелы. Принцип возможных перемещений основан на гипотезе сохранения неизменными геометрических координат звеньев системы при бесконечно малом возможном перемещении ведущего звена.
На рис. 6.1 имеем систему параллельных сил тяжести. Ковш при подъеме совершает криволинейное поступательное движение, т.к. абсолютный угол вращения ковша (7) 0.

При этом сумма элементарных работ сил механической системы на возможных перемещениях по обобщенной координате сc равна нулю Aie 0:
(6.1)
где (4) – угловое возможное перемещение стрелы; – координаты центров тяжести тел рабочего оборудования и груза в ковше.
В уравнении (6.1) распишем момент сил тяжести:
Gi yi.2 G4 y4.2 G5 y5.2 G6 y6.2 G7 y7.2 GГР.y7.2 .
Из уравнения (6.1) определим усилие в гидроцилиндрах стрелы:
T G y |
|
(4) |
. |
(6.2) |
|
i.2 |
|
||||
с |
i |
c |
|
||
|
|
|
с |
|
|
Введем обозначение кинематической передаточной функции механизма стрелы:
|
|
|
(4) |
|
|
|
|
u |
|
f |
|
|
, |
(6.3) |
|
(4) |
c |
||||||
|
|
|
|
|
|||
|
|
|
с |
|
|
|
где (4) – кинематическая передаточная функция механизма
cс
поворота стрелы, имеющая размерность рад/м.
Величина, обратная кинематической передаточной функции
|
cс |
, есть функция плеча гидроцилиндра стрелы, имеющая |
|
(4) |
|
|
|
|
размерность м. |
||
|
|
c |
|
|
|
|
h f |
с |
|
. |
(6.4) |
|
(4) |
|
|||
|
|
|
|
|
|
|
4 |
|
|
|
|
Теперь определим усилие TК |
в гидроцилиндрах стрелы. Для |
||||
определения TК |
осуществим фиксирование обобщенной координаты |
||||
q1 стрелы, т.е. |
примем q1 c4 const, а от связи гидроцилиндра |
||||
ковша освободимся и покажем силу |
реакции TК |
в шарнире 5.3 |
|||
рычага (рис. 6.2). |
|
|
|
|
|

Зададим возможное перемещение cК гидроцилиндру ковша и запишем уравнение суммы элементарных работ всех сил механической системы, при этом в случае неподвижной стрелы
|
имеем |
q |
0; |
(4) =0. |
|
|
1 |
|
|
|
Силы |
тяжести |
рычага, |
|
|
тяги и ковша совершают |
|||
Рис. 6.2 |
работу |
на |
возможных |
|
перемещениях. |
|
|||
Сумма элементарных работ всех сил системы на возможных
перемещениях равна нулю Aie |
0: |
|
(7) |
|
|
||
T c |
К |
M |
K |
0, |
(6.5) |
||
К |
|
|
|
|
|
||
где (7) – возможное угловое перемещение ковша; M K – сумма моментов сил на ковше относительно вершины стрелы (шарнира 4.3).
В уравнении (6.5) учитываются силы, связанные с телом 7 – ковшом. При этом работу силы G5 ввиду малости не учитываем. Из уравнения (6.5) определим
T M |
|
(7) |
|
|
|
|
. |
(6.6) |
|
|
|
|||
К |
K |
cК |
|
|
В уравнении (6.6) обозначим приведенную кинематическую функцию механизма поворота ковша
(7)
u , (6.7)
(7) cК
где (7) – приведенная кинематическая передаточная функция
cК
механизма поворота ковша (рад/м).
В уравнении (6.7) аналогично уравнению (6.3) кинематическая передаточная функция устанавливает связь угла поворота звена 5 с перемещением гидроцилиндра управления. С помощью кинематических передаточных функций определяются угловые скорости и угловые ускорения вращения соответствующих звеньев –

стрелы и ковша. Величина, обратная функции (6.7), является |
||||||||
силовой передаточной функцией механизма, имеет размерность м. |
||||||||
|
|
|
h |
|
c |
|
|
(6.8) |
|
|
|
= f |
|
К |
. |
||
|
|
|
5 |
|
(7) |
|
|
|
На |
|
рис. |
6.3 |
|
|
|
|
|
|
|
|
|
|
|
|||
показаны |
плечи |
|
|
|
|
|
||
рычага |
|
поворота |
|
|
|
|
|
|
ковша: h5 – плечо |
|
|
|
|
|
|||
силы TК |
относительно |
|
|
|
|
|
||
шарнира |
|
4.6 стрелы; |
|
|
|
|
|
|
h5 6 – плечо силы T6 |
|
|
|
|
|
|||
тяги |
относительно |
|
|
|
|
|
||
шарнира |
|
4.6 стрелы; |
|
|
|
|
|
|
h6 – плечо силы T6 |
|
|
|
|
|
|||
тяги |
относительно |
|
|
|
|
|
||
вершины |
стрелы |
|
|
|
|
|
||
(шарнира 4.3). |
|
|
|
|
|
|
||
Для исследования |
|
|
|
Рис. 6.3 |
|
|||
технологических |
|
|
|
|
|
|||
операций |
копания |
|
|
|
|
|
||
грунта |
|
|
|
|
|
|
|
|
и черпания материала силы, действующие на ковш, можно привести |
||||||||
к режущей кромке ковша. Равнодействующую силу R на режущей |
||||||||
кромке (рис. 6.3, 6.4) обычно показывают в виде горизонтальной |
||||||||
составляющей P1 |
и вертикальной составляющей P2 : |
R P1 P2 . На |
||||||
рис. 6.3, |
|
6.4 и других показаны максимальные значения сил P1max , |
||||||
P2max и приведенный момент от этих сил MOH . |
|
|||||||
Пара сил с моментом MОН на ковше является результатом приведения сил, действующих внутри ковша, к режущей кромке, по правилу Пуансо.
Горизонтальная сила P1 в процессе работы может приобретать
R
максимальное значение из условия сцепления колес с опорной поверхностью:
P1max СЦ mэg, (6.9)
P2max
 P1max
P1max
Рис. 6.4
где mэ – эксплуатационная масса машины с грузом в ковше; СЦ –
коэффициент сцепления колес с опорной поверхностью; g – вес единицы массы, g=9,81 Н/кг.
Для размерного ряда колесных фронтальных погрузчиков сила
P1max |
зависит от массы машины и коэффициента сцепления (табл. |
|
6.1), |
при этом коэффициент сцепления для срезанного |
грунта |
СЦ =0,6 0,8, т.е. зависит от вида грунта и его влажности. |
|
|
Максимальная вертикальная сила P2max на режущей |
кромке |
|
ковша может задаваться из условия недопустимости вывешивания заднего моста при черпании и копании грунта. На практике это условие обеспечивается настройкой предохранительных клапанов гидроцилиндров подъема стрелы.
Для прочностных расчетов рабочего оборудования типоразмерного ряда фронтальных погрузчиков силу P2max (кН) можно принимать равной удвоенной грузоподъемности погрузчика:
|
|
P2max 2QП g. |
(6.10) |
||
|
Предельные значения сил P1max , P2max |
Таблица 6.1 |
|||
|
|
|
|||
|
|
|
|
|
|
Тип |
Грузоподъ- |
Эксплуата- |
Максимальная |
Максимальная |
|
горизонтальная сила |
вертикальная |
|
|||
машины |
емность |
ционная масса |
( СЦ 0,7) P1max , кН |
сила P2 max , кН |
|
|
QП , т |
машины mэ, кг |
|
||
ПК-2 |
2,2 |
7500 |
51,45 |
43,164 |
|
ПК-3 |
3,0 |
10150 |
69,63 |
58,86 |
|
ПК-7 |
7,0 |
27270 |
187,07 |
137,2 |
|