

2328
.pdfвверх или вниз при |
|
отсутствии |
|
вертикальных |
|
ускорений. Этим |
|
свойством не |
|
обладают известные |
|
неровности, |
|
задаваемые в теории |
Рис.10.9 |
трактора и |
|
автомобиля. |
|
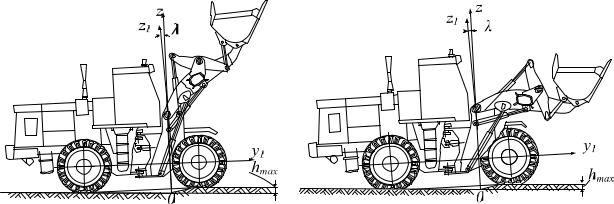
При въезде переднего моста погрузчика на ли-
нейную неровность остов погрузчика начинает поворачиваться в вертикальной плоскости Oyz с постоянной угловой скоростью (рис. 10.10), определяемой по формуле [67]
|
|
|
|
|
x |
|
Vz |
|
Vд tg |
, |
(10.28) |
|||||
L |
|
|||||||||||||||
|
|
|
|
|
|
|
|
L |
|
|||||||
где L– база погрузчика. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
z |
1 |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
О |
1 |
1 |
|
|
max |
О |
y |
y |
|
|
max |
Рис. 10.10
Особенность уравнения (10.28) состоит в том, что угловая скорость x остается постоянной в течение времени движения

колеса по неровности, определяемого по формуле t1 ymax .
Vд
Известно положение о том, что угловые характеристики тела при плоском движении не зависят от выбора полюса на этом теле. Поэтому, приняв за полюс точку крепления стрелы на портале, определим скорость движения поршня в гидроцилиндре стрелы, вызванную линейным воздействием выступа:
V1 VГЦC xh4 ,
где h4 –плечо гидроцилиндра стрелы; V1 – скорость поршня
гидроцилиндров стрелы.
Полученная скорость является начальным условием, возбуждающим колебания рабочего оборудования по дифференциальному уравнению (10.23).
Начальное условие колебательного процесса рабочего оборудования погрузчика имеет вид: при t=0 V0 VПГЦ xh4;
V0 0.
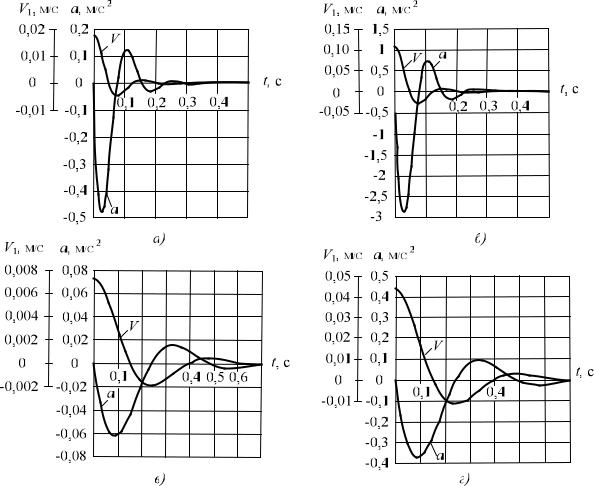
Следовательно, математически моделируя в дифференциальном уравнении (10.23) возбуждающее воздействие по скорости V0 V1, можно возбуждать переходные процессы (рис. 10.11 – 10.13) затухания этой скорости движения в гидроцилиндре. Процесс затухания скорости V1 движения поршня сопровождается появлением ускорения поршня и его затуханием. Максимум пика ускорения amax позволяет определить максимальную силу инерции ФГЦС от приведенной к поршню массы рабочего оборудования:
ФГЦС mПРamax,
где ФГЦС – сила инерции поршня гидроцилиндра стрелы; amax –
величина пика ускорения силы инерции приведенной массы рабочего оборудования, возбужденная линейной неровностью.
Полученная сила инерции поршня ФГЦС позволяет определить
динамическое давление в гидросистеме, вызванное единичным линейным выступом:
p |
д |
|
ФГЦС |
. |
||
|
||||||
|
|
|
2 |
|
||
|
|
|
||||
|
|
|
|
Dc |
|
|
|
|
|
|
|||
|
|
|
2 |
|
|
|
|
|
|
|
4 |
||
|
|
|
|
|
||
На рис. 10.11 приведены для примера переходные процессы, возбуждаемые в гидроприводе стрелы погрузчика ПК-3. При движении погрузчика ПК-3 на транспортном режиме с грузом в ковше (mПР = =78432 кг) для стрелы внизу со скоростью Vд=0,5 м/с
возникает пик ускорения amax=0,475 м/с2 (рис. 10.11,а). При движении со скоростью Vд=3 м/с для стрелы внизу пик ускорения
составляет amax=
=2,8 м/с2 (рис. 10.11,б). При движении с поднятой стрелой при скорости Vд=0,5 м/с пик ускорения составляет amax=0,06 м/с2 (рис.
10.11,в), а при движении со скоростью Vд=3 м/с amax=0,375 м/с2
(рис.10.11,г).
Рис. 10.11
Рассмотрим результаты, полученные для погрузчика ПК-15 на транспортном режиме (стрела внизу), для скоростей движения погрузчика Vд=0,5 м/с (рис. 10.12,а) и Vд=3 м/с (рис. 10.12,б).
Для погрузчика ПК-15 со стрелой, поднятой в верхнее предельное положение, имеем пики ускорения, для скоростей Vд=0,5 м/с и Vд=3 м/с имеем соответственно amax=0,055 м/с2; amax=0,33 м/с2 (рис. 10.12,б,в,г).
Аналогичные результаты получены для супертяжелого погрузчика ПК-75 на транспортном режиме движения со стрелой внизу (рис. 10.13,а,б) и с поднятой стрелой (рис. 10.13,в,г) при скоростях движения Vд=0,5 м/с и Vд=3 м/с.
В рассмотренных случаях возбуждения переходных процессов рабочего оборудования (см. рис. 10.11, 10.12, 10.13) использованы разные параметры линейного выступа (табл. 10.7).
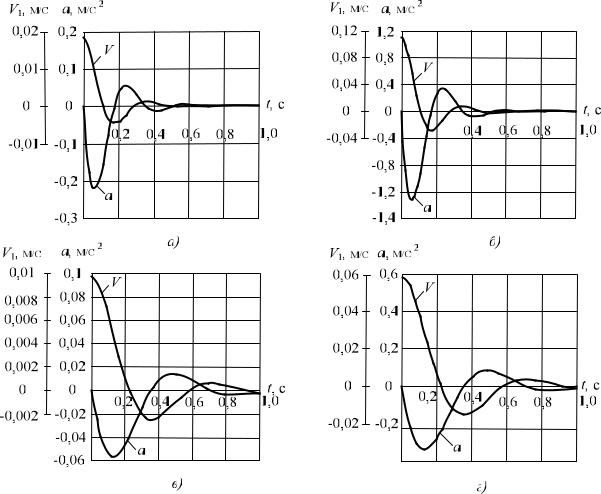
Рис. 10.12
Таблица
10.7
Параметры линейной неровности для погрузчиков
Тип погрузчика |
Высота линейного |
Длина линейного |
|
выступа hmax , м |
выступа ymax , м |
||
|
|||
|
|
|
|
ПК-3 |
0,10 |
0,5 |
|
|
|
|
|
ПК-15 |
0,15 |
1,0 |
|
|
|
|
|
ПК-75 |
0,20 |
1,5 |
|
|
|
|
На рис. 10.14 – 10.16 показаны зависимости динамических давлений в гидроцилиндрах стрелы для рассматриваемых трех
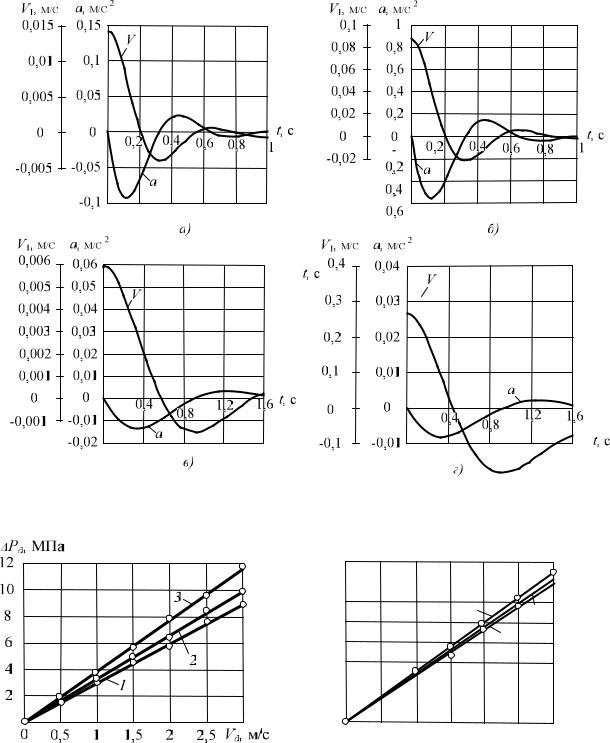
типов погрузчиков ПК-3 (рис. 10.14), ПК-15 (рис. 10.15) и ПК-75 (рис. 10.16). Три кривые на этих рисунках соответствуют разным положениям стрелы: 1 – кривая для стрелы внизу в транспортном положении; 2 – для горизонтального положения стрелы; 3 – для верхнего предельного положения стрелы.
Рис. 10.13
Pд, МПа
8
7 
6 |
3 |
2 |
|
5 |
|||
|
1 |
||
4 |
|
||
|
|
3
2 
1 
0 0,5 1 1,5 2 2,5 Vд, м/с
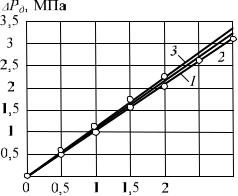
Рис. 10.14 |
Рис. 10.15 |
Полученные зависимости позволяют, используя уравнение номинального давления гидросистемы рC рС.CТ рд , определить допустимую скорость движения погрузчика, удовлетворяющую условию рC рНОМ . Графики рис.10.14–10.16 позволяют сделать важные выводы. Для погрузчика средней грузоподъемности ПК-3 статическое давление гидросистемы составляет рС.CТ =6,05 МПа, поэтому допустимая скорость движения при соблюдении условия (10.27) может составить Vд=1,5 2 м/с. При этом коэффициент динамичности процесса примерно равен Kд=2, в результате давление в гидроцилиндрах стрелы практически удваивается, но не превышает номинального расчетного значения. Из графиков рис. 10.14–10.16 видно, что погрузчики тяжелые и супертяжелые менее чувствительны к неровностям, заданным в табл. 10.7.
Полученные результаты  свидетельствуют о
свидетельствуют о 
 необходимости создания устройств для фронтального погрузчика, снижающих динамические давления в гидроцилиндрах стрелы при движении погрузчика по
необходимости создания устройств для фронтального погрузчика, снижающих динамические давления в гидроцилиндрах стрелы при движении погрузчика по 






 неровной опорной поверхности.
неровной опорной поверхности.
Рис. 10.16
10.7. Устройство защиты гидропривода фронтального погрузчика при движении по неровностям опорной поверхности
На рис.10.17,а,б показан наезд на неровность фронтального погрузчика с максимально поднятой стрелой и со стрелой в горизонтальном положении.
б)
а)
Рис. 10.17
В обоих случаях ковш загружен материалом и фронтальный погрузчик движется на максимальной транспортной скорости
Vд VдТ max .
На рис. 10.18 представлена гидросистема защиты рабочего оборудования погрузчика с двумя гидроцилиндрами стрелы и одним уравновешивающим пневмоцилиндром.

Рис. 10.18
Устройство защиты гидропривода фронтального погрузчика содержит колесный тягач 1, рабочее оборудование 2, гидроцилиндры подъема стрелы 3, уравновешивающий пневмогидроцилиндр 4, газовый баллон 5, гидроамортизатор 6, обратный клапан 7, регулируемый дроссель 8, клапан «ИЛИ» 9, гидронасос 10, распределитель 11, гидробак 12. Сущность способа защиты гидропривода фронтального погрузчика от внешних воздействий состоит в расширении функциональных возможностей системы на разных режимах работы фронтального погрузчика.
Помимо основных функций подъема, опускания рабочего оборудования гидропривод обеспечивает возможность гашения колебаний поршня в гидроцилиндре при запертых окнах распределителя, а также позволяет гасить колебания при подъеме стрелы с грузом в начальный момент разгона при открытых окнах распределителя.
Сущность работы устройства в режиме подъема после наполнения ковша материалом состоит в выполнении операции разгона рабочего оборудования из неподвижного состояния в режим равномерного подъема груза, при котором возникают большие силы инерции и повышается давление рабочей жидкости в поршневых полостях гидроцилиндров стрелы, в результате чего

осуществляется сброс небольшого объема рабочей жидкости в гидроамортизатор.
Для подъема ковша погрузчика после заполнения его материалом осуществляют включение золотника распределителя 11 вниз. Рабочую жидкость от гидронасоса 10 подают в поршневые полости гидроцилиндров 3 стрелы. Начало подъема рабочего оборудования сопровождается появлением значительных сил инерции рабочего оборудования и увеличением давления в поршневых полостях гидроцилиндров стрелы. В результате чего часть жидкости сбрасывается через обратный клапан 7 в гидроамортизатор 6. После разгона рабочего оборудования и установления постоянной скорости поворота стрелы давление в рабочих полостях гидроцилиндров 3 стрелы снижается и рабочая жидкость из гидроамортизатора 6 через регулируемый дроссель 8 возвращается в поршневые полости гидроцилиндров 3 стрелы. Таким образом, в процессе подъема, опускания поршень обеспечивает гашение колебаний при открытых окнах распределителя.
Предложенная гидросистема на транспортном режиме работает следующим образом. Движение фронтального погрузчика с грузом в ковше происходит со стрелой, поднятой в транспортное положение, показанное на рис. 10.10. При подходе колес погрузчика к неровности, имеющей длину ymax и высоту hmax, оператор с существующей гидросистемой рабочего оборудования обычно снижает скорость движения или выполняет маневры с целью объезда неровности. В обоих рассмотренных случаях снижается производительность погрузчика. Предложенный способ позволяет переезжать неровности без снижения скорости движения погрузчика. Наезд колес погрузчика на неровность происходит за
время t1 ymax , где Vд – скорость движения погрузчика с грузом в
Vд
ковше.
За время t1 происходит поворот остова тягача относительно оси заднего моста вместе с рабочим оборудованием и возникает угловая скорость стрелы и груза, в результате которых в поршневых полостях гидроцилиндров стрелы повышается давление рабочей жидкости. При некотором давлении настройки гидроамортизатора происходит сброс небольшого объема рабочей