

2.2. Плотность распределения вероятности рассогласования.
Одной из основных
характеристик системы является плотность
распределения вероятностей (ПРВ)
рассогласования
 .
.
В аналитических расчётах используется метод, согласно которому искомое распределение является решением уравнения ФПК, которое в стационарном режиме имеет вид
 ,
,
где
 - ОСШ, которое может быть рассчитано как
- ОСШ, которое может быть рассчитано как
 ,
а
,
а
 [11].
[11].
Несмотря на то,
что уравнение и его решение получены
для непрерывных систем, можно
воспользоваться результатами, если
принять шаг дискретизации по времени
 достаточно малым. Такое допущение имеет
право на существование, потому что в
главе рассматривается бесфильтровая
ФАС, в которой текущее состояние системы
определяется только предыдущим состоянием
и входным воздействием.
достаточно малым. Такое допущение имеет
право на существование, потому что в
главе рассматривается бесфильтровая
ФАС, в которой текущее состояние системы
определяется только предыдущим состоянием
и входным воздействием.
Решить аналитически уравнение ФПК достаточно трудно, поэтому решение удобно представить в виде ряда Фурье
 ,
(3)
,
(3)
коэффициенты
которого рассчитываются с помощью
модифицированной функции Бесселя
 .
.
Для упрощения
расчётов и проверки аналитических
зависимостей приравняем в уравнении
(2.2) параметры
 ,
,
 и обозначим нормированную расстройку
и обозначим нормированную расстройку
 .
Перепишем уравнение с учётом введённых
обозначений
.
Перепишем уравнение с учётом введённых
обозначений
 .
(2.4)
.
(2.4)
Таким образом, уравнение записано относительно безразмерных величин.
Тогда при условии
 получим
получим
 .
.
При малых значениях ОСШ и отсутствии частотной расстройки справедливо равенство
 ,
,
которое в пределе принимает форму [11], т.е.
 .
.

Рис. 2.2. Зависимость
 ,
полученная
,
полученная
моделированием (линия с прямоугольником) и
расчётом (линия с окружностью).
Произведём
параллельно моделирование и расчёт при
заданных параметрах и
 дБ.
дБ.
На рис. 2.2. построены
две ПРВ
 ,
полученные моделированием (линия с
прямоугольником) и аналитическим
расчётом (линия с окружностью).
,
полученные моделированием (линия с
прямоугольником) и аналитическим
расчётом (линия с окружностью).
Из графика видно,
что в достаточно большой окрестности
 кривые совпадают, т.е. формулы дают
достоверный результат.
кривые совпадают, т.е. формулы дают
достоверный результат.
При наличии
частотной расстройки, т.е. при значениях
 расчёты намного усложняются.
расчёты намного усложняются.
Принцип работы
бесфильтровой системы в режиме частотной
расстройки без шума заключается в
следующем. Пусть в начальный момент
времени начальные фазы полезного сигнала
и УГ совпадают, тогда
 .
Детектор измеряет разницу фаз опорного
колебания и УГ и прибавляет её к фазе
УГ. Разница
.
Детектор измеряет разницу фаз опорного
колебания и УГ и прибавляет её к фазе
УГ. Разница
 ,
поэтому
,
поэтому
 ,
и фаза УГ не изменяется, т.е.
,
и фаза УГ не изменяется, т.е.
 .
Фаза полезного сигнала изменится на
.
Фаза полезного сигнала изменится на
 и станет
и станет
 .
В этом случае детектор определит разницу
.
В этом случае детектор определит разницу
 и произойдёт коррекция фазы УГ, т.е.
и произойдёт коррекция фазы УГ, т.е.
 ,
однако
,
однако
 ,
и разница на выходе детектора составит
,
и разница на выходе детектора составит
 .
.
Тогда
 ,
а
,
а
 .
.
Таким образом,
процесс будет повторяться с каждым
тактом, и при
 за счёт чередования «+» и «-» в формуле
получим
за счёт чередования «+» и «-» в формуле
получим
 .
.
Все дальнейшие рассуждения проведены относительно уравнения (2.4).
ПРВ в переходном режиме рассчитывается по разностной схеме, согласно которой производные заменяются разностями, т.е.
 ,
,
 ,
,
где параметры
 и
и
 задают точность вычислений по времени
и фазе соответственно [11]. Рассмотрим
задают точность вычислений по времени
и фазе соответственно [11]. Рассмотрим
 в стационарном режиме, т.е. когда все
переходные процессы закончились. Для
этого не будем последовательно решать
разностную задачу по отысканию
в стационарном режиме, т.е. когда все
переходные процессы закончились. Для
этого не будем последовательно решать
разностную задачу по отысканию
 ,
воспользуемся представленной ранее
формулой разложения
,
воспользуемся представленной ранее
формулой разложения
 в ряд (2.3). Вычисление коэффициентов
напрямую представляет собой трудоёмкую
задачу, однако для расчёта можно
воспользоваться рекуррентными
соотношениями, что заметно упрощает
решение. Эти разностные уравнения имеют
вид
в ряд (2.3). Вычисление коэффициентов
напрямую представляет собой трудоёмкую
задачу, однако для расчёта можно
воспользоваться рекуррентными
соотношениями, что заметно упрощает
решение. Эти разностные уравнения имеют
вид
и решаются при
начальных условиях
 ,
,
 [11]. Для решения системы необходимо знать
[11]. Для решения системы необходимо знать
 и
и
 ,
вычисление которых удобно производить
по приближённым формулам. При малых
значениях
,
вычисление которых удобно производить
по приближённым формулам. При малых
значениях
 коэффициенты могут быть найдены как
коэффициенты могут быть найдены как
 ,
,
 .
.
Построим ПРВ
рассогласования при значении
 ,
исходя из приближённых формул, и сравним
их с результатом моделирования.
,
исходя из приближённых формул, и сравним
их с результатом моделирования.
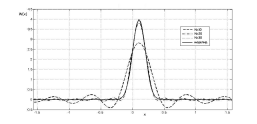
Рис. 2.3. Зависимость
 при
при
 ,
полученная
,
полученная
моделированием (сплошная линия) и расчётом при значениях