

2 (Сплошная линия),
4 (Штриховая линия) и
8 (Штрих - пунктирная линия).
При этом срыв
слежения более вероятен, чем при
 ,
потому что ПРВ рассогласования стала
ближе к границе срыва
,
потому что ПРВ рассогласования стала
ближе к границе срыва
 ,
что согласуется с выражением (2.6).
Рассуждения проиллюстрированы на рис.
2.11. На графике изображена зависимость
,
что согласуется с выражением (2.6).
Рассуждения проиллюстрированы на рис.
2.11. На графике изображена зависимость
 ,
полученная моделированием при
,
полученная моделированием при
 (сплошная линия) и
(сплошная линия) и
 (штриховая линия). Стрелкой показано
расстояние до границы срыва.
(штриховая линия). Стрелкой показано
расстояние до границы срыва.

Рис. 2.11. Зависимость
 при
при
 (сплошная линия)
и
(сплошная линия)
и
 (штриховая линия)
(штриховая линия)
Из графика на рис.
2.11 видно, что смещённая по частоте ПРВ
находится ближе к границе, поэтому срыв
слежения в ней более вероятен. Об этом
также свидетельствует максимум кривой,
т.е. у смещённой по частоте
 максимум немного ниже, чем у несмещённой.
Это происходит из-за более частых срывов,
которые увеличивают дисперсию и,
соответственно, уменьшают высоту пика.
максимум немного ниже, чем у несмещённой.
Это происходит из-за более частых срывов,
которые увеличивают дисперсию и,
соответственно, уменьшают высоту пика.
Из сравнительного анализа статистических характеристик, полученных аналитическим расчётом и моделированием, можно сделать вывод, что качественно результаты совпадают, однако некоторые формулы имеют жёсткие рамки по применению и дают лишь приближённый результат. Таким образом, в целом модель подтверждает состоятельность математического аппарата и позволяет внести в него коррекции для повышения точности, тем самым делая его более гибким для инженерных расчётов.
Математическая модель схемы и расчёт характеристик произведён с помощью универсальной интегрированной СКМ MATLAB 7.0, в частности системой визуального проектирования Simulink 6.0.
Глава 3. Сравнительный анализ цифровых систем синхронизации.
Наилучшую помехоустойчивость при передаче информации обеспечивает когерентный прием радиосигналов на фоне помех. Поэтому обязательным элементом квазикогерентных приемных устройств является система фазовой автоподстройки (ФАП) и её цифровой аналог – цифровая система синхронизации (ЦСС). Область применения ЦСС охватывает синтез частот и разнообразные системы автоматического управления [10, 11].
Функционирование ЦСС сводится к следующему[3,4]:
1) дискретизации входного сигнала синхронно с моментами формирования импульсов опорного сигнала;
2) накоплению и усреднению некоторого (возможно, случайного) числа выборок;
3) анализу знака усредненной выборки;
4) коррекции фазы опорного сигнала на плюс-минус один дискрет на каждом периоде в зависимости от знака усредненной выборки.
ЦСС используют пошаговую коррекцию фазы опорного сигнала [11]. В данной главе рассматриваются полностью цифровые системы, которые осуществляют обработку на частоте приходящего колебания [14].
Целью главы является определение схемы, обладающей наибольшей точностью слежения. На основе сравнительного анализа статистических характеристик различных математических моделей ЦСС сделано заключение, в котором изложены основные достоинства и недостатки каждой из схем. Предложена схема, которая обеспечивает наиболее качественный приём.
3.1. Структура математической модели цсс.
ЦСС отличаются друг от друга главным образом фильтром (устройством усреднения, УУ). В дальнейшем рассматриваются ЦСС, при работе которых будет важен только знак фазовой ошибки, в этом случае характеристика фазового детектора является прямоугольной.
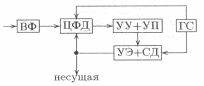
Рис. 3.1. Общая структурная схема.
Рассмотрим общую
структурную схему (рис. 3.1), в которой ВФ
– входной фильтр, ЦФД - цифровой фазовый
детектор, УУ+УП – устройства усреднения
и преобразования, УЭ+СД – управляемый
элемент со счётчиком-делителем, ГС –
генератор синхросигнала. Функционирование
ЦСС осуществляется следующим образом
[11]. На вход системы поступает аддитивная
смесь
 ,
где
,
где
 - сигнал,
- сигнал,
 -
шум. Эта смесь проходит предварительную
фильтрацию в ВФ. На вход ЦФД поступают
три сигнала: входной сигнал
-
шум. Эта смесь проходит предварительную
фильтрацию в ВФ. На вход ЦФД поступают
три сигнала: входной сигнал
 ,
опорный
сигнал
,
опорный
сигнал
 ,
формируемый
блоком УЭ+СД, и синхросигнал с блока ГС.
Предназначение блока - сформировать на
выходе цифровые коды, несущие
информацию о текущем фазовом рассогласовании
в системе. Далее коды поступают на УУ+УП,
которое определённым образом накапливает
их, оценивает результат и затем
вырабатывает положительный или
отрицательный импульс. Этот импульс
является управляющим для УЭ+СД, т.е. он
корректирует фазу опорного сигнала на
один дискрет в зависимости от полярности
импульса.
,
формируемый
блоком УЭ+СД, и синхросигнал с блока ГС.
Предназначение блока - сформировать на
выходе цифровые коды, несущие
информацию о текущем фазовом рассогласовании
в системе. Далее коды поступают на УУ+УП,
которое определённым образом накапливает
их, оценивает результат и затем
вырабатывает положительный или
отрицательный импульс. Этот импульс
является управляющим для УЭ+СД, т.е. он
корректирует фазу опорного сигнала на
один дискрет в зависимости от полярности
импульса.

Рис.3.2. Входной сигнал и возможные состояния опорного сигнала.
На рис. 3.2 внизу
изображён входной сигнал, а вверху
возможные состояния фазы опорного
сигнала. Всего таких состояний может
быть
 .
При увеличении рассогласования система
из состояния «N»
переходит в состояние «–N»
и, наоборот, из «N»
в «–N».
Таким образом, ЦСС представляет собой
замкнутую систему, следящую за фазой
входного сигнала [15, 17].
.
При увеличении рассогласования система
из состояния «N»
переходит в состояние «–N»
и, наоборот, из «N»
в «–N».
Таким образом, ЦСС представляет собой
замкнутую систему, следящую за фазой
входного сигнала [15, 17].