

4.2. Модель схемы Кессны - Леви.
Рассмотрим ЦСС, структурная схема которой представлена на рис. 4.3 слева [11]. Система состоит из шести блоков: первый из них - перемножитель. Далее по порядку обработки следует комбинация из двух блоков: ограничителя и устройства усреднения.
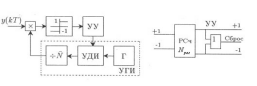
Рис. 4.3. Схема Кессны - Леви.
Функцию коррекции фазы опорного сигнала выполняет четвертый по порядку обработки блок системы – устройство добавления-исключения импульсов (УДИ). Фазу импульсной последовательности на выходе делителя частоты можно изменять за счет добавления или же исключения синхроимпульса из очередного периода опорного сигнала.
4.3. Цсс с перестроением параметров.
4.3.1. Целевая функция.
Для того чтобы знать, какие значения должны принимать параметры УУ, необходимо составить функцию, которая зависит от этих параметров и значение которой характеризует оптимальность их выбора.
Целевая функция
должна содержать в себе все показатели,
которые характеризуют качество системы.
В данном случае такими показателями
являются дисперсия ошибки слежения
 и среднее время до первого регулирования
и среднее время до первого регулирования
 .
.
Все дальнейшие
расчёты производятся при
 =4.
Хотя увеличение
=4.
Хотя увеличение
 и ведёт к уменьшению дисперсии ошибки
слежения, что следует из формулы
и ведёт к уменьшению дисперсии ошибки
слежения, что следует из формулы
 ,
,
где
 ,
но для реализации таких систем требуется
большая частота генератора синхроимпульсов
и, более того уменьшается полоса захвата
ЦСС [4.3]. В главе рассматривается
принципиальный метод построения системы
с изменением
,
но для реализации таких систем требуется
большая частота генератора синхроимпульсов
и, более того уменьшается полоса захвата
ЦСС [4.3]. В главе рассматривается
принципиальный метод построения системы
с изменением
 вне зависимости от
вне зависимости от
 .
Если же система такова, что
.
Если же система такова, что
 имеет иное значение, то необходимо
просто заново настроить систему (см.
далее).
имеет иное значение, то необходимо
просто заново настроить систему (см.
далее).
Пусть на вход схемы приходит прямоугольный периодический сигнал на фоне БШ с нормальным распределением и нулевым математическим ожиданием.
На рис. 4.4 построена
зависимость среднего времени до первого
регулирования
 от ОСШ
от ОСШ
 на входе при
на входе при
 =4,
8 и 16.
=4,
8 и 16.
Примечание: здесь
и в дальнейшем на графиках приняты
следующие обозначения : 1
-
 ,
2
-
,
2
-
 и 3
-
и 3
-
 .
.

Рис. 4.4. Зависимость
 от
от
 при
при
 =4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).
=4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).

Рис. 4.5. Зависимость
 от
от
 при
при
 =4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).
=4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).
На рис. 4.5 построена
зависимость дисперсии ошибки слежения
 от ОСШ
от ОСШ
 на входе при
на входе при
 =4,
8 и 16[4].
=4,
8 и 16[4].
Для того чтобы
составить целевую функцию, следует
сначала нормировать параметры, так как
они имеют разные диапазоны измерения.
В итоге
 и
и
 лежат в диапазоне
лежат в диапазоне
 .
Далее выберем весовые коэффициенты.
Например, примем
.
Далее выберем весовые коэффициенты.
Например, примем
 в 4 раза более значимым, чем
в 4 раза более значимым, чем
 .
Тогда целевая функция примет вид
.
Тогда целевая функция примет вид
 .
.

Рис. 4.6. Зависимость
 от
от
 при
при
 =4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).
=4
(цифра 1), 8 (цифра 2) и 16 (цифра 3).
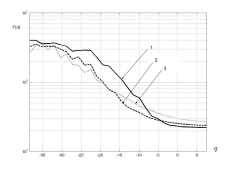
Рис. 4.7. Зависимость
 от
от
 при
при
 =4
(цифра 1), 8 (цифра 2) и 16 (цифра 3) в
логарифмическом масштабе по оси ординат.
=4
(цифра 1), 8 (цифра 2) и 16 (цифра 3) в
логарифмическом масштабе по оси ординат.
На графиках рис.
4.6, 4.7 изображена зависимость целевой
функции
 в зависимости от ОСШ
в зависимости от ОСШ
 на входе системы при различных значениях
размерности накопителя
на входе системы при различных значениях
размерности накопителя
 .
Графики пересекаются между собой, что
говорит о том, что при разных значениях
ОСШ для обеспечения оптимального приёма
(
.
Графики пересекаются между собой, что
говорит о том, что при разных значениях
ОСШ для обеспечения оптимального приёма
(
 ) необходимо использовать разные значения
) необходимо использовать разные значения
 .
Так, при
.
Так, при
 ,
при
,
при
 ,
а при
,
а при
 .
Здесь рассматривается диапазон значений
.
Здесь рассматривается диапазон значений
 ,
хотя
,
хотя
 может изменяться в пределах
может изменяться в пределах
 ,
тогда появятся новые области оптимальности.
,
тогда появятся новые области оптимальности.