

Статический момент нагрузки изменяется по квадратичному закону
 и
и

Из
уравнения (1-5) получим



Откуда
следует, что подводимое напряжение в
этом случае необходимо изменять
пропорционально квадрату частоты тока
 .
При этом сохраняется постоянным
соотношение:
.
При этом сохраняется постоянным
соотношение:
Так
как критический момент согласно (1-7) при

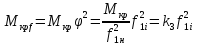
Будет изменяться пропорционально квадрату частоты тока.

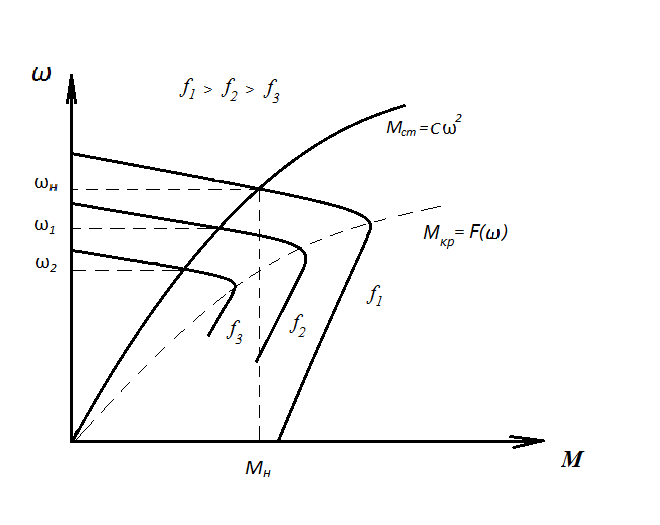
Рис.1-2
Механические характеристики асинхронного
двигателя при частотном регулировании
и статическом моменте

Если
в процессе частотного регулирования
скорости двигателя не изменять напряжения,
то с увеличением частоты тока значение
критического момента асинхронного
двигателя уменьшается.
 ,
с ротором
,
с ротором ,
при
,
при поток, а следовательно момент
поток, а следовательно момент будет уменьшаться.
будет уменьшаться.
Рис.1-3 Механические характеристики асинхронного двигателя при частотном регулировании и неизменном напряжении на статоре
§ 5.13. Системы частотного регулирования асинхронных двигателей
21.10.2010 18:37 Администратор
Структурная схема преобразователя частоты (рис. 5.44, a), питающегося от сети постоянного тока, содержит следующие основные элементы: входной фильтр 1, служащий для уменьшения пульсации тока в питающей сети; регулятор напряжения 2, позволяющий изменять напряжение на асинхронном двигателе в соответствии с выбранным законом регулирования при изменении частоты; собственно преобразователь частоты 3 (инвертор), поочередно подключающий фазы обмотки статора двигателя 4 к шинам разной полярности.
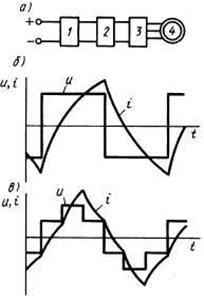
Рис. 5.44. Структурная схема (а) преобразователя частоты, питающегося от сети постоянного тока, и графики его выходных напряжения (б) и тока (в)
Рассматриваемая структурная схема является типичной. Она позволяет наиболее четко представить все функциональные зависимости, существующие в преобразователе частоты: переключение фаз обмотки двигателя, регулирование напряжения и фильтрацию переменных составляющих тока, не допуская их попадания в питающую сеть. Часто в эту схему вводят различные изменения, например после регулятора напряжения 2 включают еще один фильтр; иногда функции преобразователя частоты и регулятора напряжения совмещают в одном устройстве и т. п.
В зависимости от схемы преобразователя частоты его выходное напряжение имеет прямоугольную форму (рис. 5.44, б)
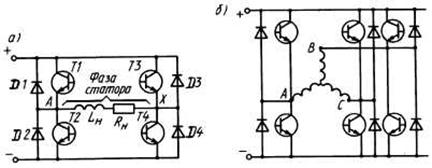
Рис. 5.45. Схемы питания одной фазы асинхронного двигателя (а) и трех
его фаз (б) от транзисторного мостового инвертора
или ступенчатую (рис. 5.44, в) форму. В соответствии с этим изменяется и ток i в фазах двигателя.
Принципиальные схемы питания частотно-регулируемых двигателей. На рис. 5.45, а показана однофазная мостовая схема транзисторного инвертора (без регулятора напряжения и фильтра), применяемого в настоящее время для регулирования частоты вращения двигателей мощностью до 10 кВт. Транзисторы можно представить в виде идеальных ключей, поочередно попарно включающихся: при включении транзисторов T1 и Т4 к началу фазы АХ подают положительный потенциал, а к концу ее—отрицательный. После их выключения и включения транзисторов Т2 и ТЗ к концу фазы АХ подают положительный потенциал, а к началу—отрицательный. Таким образом, на фазу АХ подается переменное напряжение и прямоугольной формы (рис. 5.44, б), основная гармоническая которого ul=(4Usinωt)/π. Частота f1 питающего напряжения определяется частотой переключения транзисторов. При активно-индуктивной нагрузке Rн-Lн, которую представляет фаза статора, ток в ней i отстает по фазе от напряжения. Для его замыкания в отрезки времени, когда напряжение изменяет свою полярность, служат обратные диоды DI...D4. Например, после закрытия транзисторов Т1 и Т4 ток в нагрузке некоторое время проходит в прежнем направлении—от А к X, замыкаясь через диоды D3, D2 и через источник питания (во встречном направлении), пока не уменьшится до нуля.
|
|
Схема трехфазного мостового транзисторного инвертора показана на рис. 4.46. Благодаря поочередному включению транзисторов ток последовательно проходит по контурам обмоток АВ-АС-ВС-ВА-СА-СВ-АВ, благодаря чему в двигателе создается вращающееся магнитное поле. Достоинством трехфазной мостовой схемы преобразователя является то, что В кривых фазных токов отсутствуют третьи гармонические.
В ряде случаев регулирование напряжения осуществляется без установки специального регулятора — «внутренними» силами инвертора. Для этого выходное напряжение инвертора
|
|
|
Рис. 4.47. Графики изменения напряжения, подаваемого на обмотку статора двигателя при широтноимпульсном регулировании (а) и при широтноимпульсной модуляции по синусоидальному закону (б) |
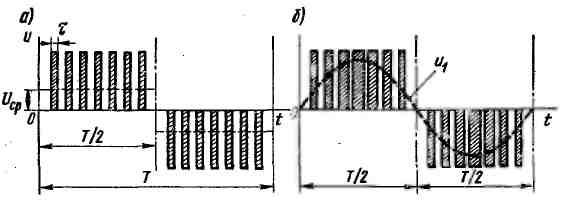
модулируется высокочастотными сигналами (рис. 4.47, а), при которых кратковременные импульсы напряжения сменяются паузами. Среднее напряжение за полупериод получается равным
(4.74)
Ucp = U ∑τ /0,5T = γU,
где ∑τ — сумма проводящих отрезков времени за полупериод T/2; γ = ∑τ/0,5T— коэффициент заполнения.
где ∑τ — сумма проводящих отрезков времени за полупериод Т/2; у = ∑τ/0,5Т-коэффициент заполнения.
Путем изменения соотношения между проводящими и непроводящими отрезками времени, т. е. изменения коэффициента заполнения, можно регулировать среднее значение выходного напряжения при неизменном значении входного напряжения. Рассмотренный метод регулирования называют широтно-импульсным.
При широтно-импульсном регулировании в мостовом инверторе (см. рис. 5.45, а) в течение одного полупериода один транзистор, подающий питание на фазу статора, включен все время (например, Т2), а другой—периодически с временами τ (в данном случае Т3). Во время пауз, т. е. когда транзистор Т3 закрыт, ток через нагрузку замыкается по контуру: транзистор Т2—диод D4 — нагрузка, т. е. минуя источник тока, благодаря чему во время пауз напряжение равно нулю.
При широтно-импульсном методе регулирования напряжения влияние высших гармонических значительно сильнее (особенно при малых γ), чем при прямоугольной форме напряжения. Для их уменьшения увеличивают число импульсов в полупериоде, т. е. частоту модуляции fи, делая ее не меньше чем в 12 раз выше частоты основной гармонической fм инвертора (машинной частоты).
При мощностях до сотен ватт это обстоятельство не создает заметных неудобств, так как частотные свойства
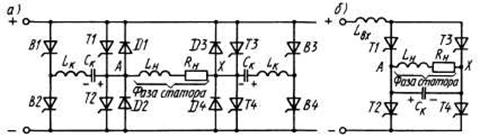
Рис. 5.47. Схема питания одной фазы асинхронного двигателя от инвертора
напряжения (а) и инвертора тока (б) на тиристорах
транзисторов очень высокие. При мощностях более 10 кВт применяют не транзисторы, а более мощные вентили — тиристоры, частотные свойства которых значительно ниже, вследствие чего применение широтно-импульсного регулирования требует специальных тиристоров (с повышенными динамическими свойствами), так как необходимая частота импульсов составляет примерно 5000...10000 Гц.
Некоторое улучшение спектрального состава выходного напряжения можно получить, применив широтно-импульсную модуляцию по синусоидальному закону (см. рис. 5.46,5), при которой ширина импульсов изменяется в течение полупериода; наибольшая ширина импульсов наблюдается в середине периода, а к началу и концу полупериода уменьшается.
На рис. 5.47,й приведена схема одной фазы инвертора на тиристорах при использовании широтно-импульсной модуляции. Кроме главных тиристоров Т1...Т4 и соответствующих им обратных диодов 1...4 фаза инвертора имеет еще два коммутирующих узла, состоящих из конденсатора Ск и реактора Lк, которые служат для запирания тиристоров. Конденсаторы Ск через вспомогательные тиристоры В1...В4 заряжаются от сети прежде, чем включаются главные тиристоры. Например, перед включением тиристоров Т1 и Т4 конденсаторы должны иметь полярность, показанную на рис. 5.47, а. По сигналу управления тиристоры Т1 и Т4 включаются и проводят ток какое-то время.
Для их запирания на вспомогательные тиристоры В1 и В4 подают импульсы управления и после включения этих тиристоров заряженные конденсаторы Ск подключаются к тиристорам Т1 и Т4 так, что разрядный ток конденсатора направляется против тока тиристора. В связи с этим ток через тиристоры Т1 и Т4 прекращается, а конденсаторы продолжают разряжаться через нагрузку и обратные диоды до тех пор, пока напряжение на них не изменит знак и оно станет равным напряжению питания (или несколько больше). После перезаряда конденсаторы оказываются подготовленными к запиранию тиристоров Т2 и ТЗ. Для запирания тиристоров Т2 и ТЗ (при широтно-импульсной модуляции) открывают вспомогательные тиристоры В2 и ВЗ. Приведенный пример показывает сложность выполнения инвертора на тиристорах, для которого кроме главных тиристоров требуются узлы запирания, состоящие из вспомогательных тиристоров, конденсаторов Ск и реакторов Lк. Это увеличивает массу и стоимость инверторов и снижает их надежность.
Кроме того, в инверторах рассмотренного типа (инверторах напряжения) возможны очень большие пики тока при малых частотах вращения двигателя. Это объясняется тем, что минимальная длительность приложения напряжения τmin довольно велика, так как она определяется временем перезаряда коммутирующего конденсатора. При малой частоте вращения двигателя ЭДС вращения в обмотке статора практически отсутствует и за период проводящего состояния инвертора ток в обмотке существенно возрастает.
Используют и другой тип инвертора — инвертор тока, в котором не может возникать больших пиков токов, а коммутирующие устройства существенно упрощаются (рис. 5.47, б). На входе такого инвертора включают мощный реактор Lвх, вследствие/чего ток в нем практически неизменен и равен току нагрузки (I≈Iн). При включенном состоянии тиристоров Т1 и Т4 ток в нагрузке проходит от начала фазы к концу, а коммутирующий конденсатор Ск заряжается с полярностью, показанной на схеме. Когда нужно изменить направление тока в нагрузке, подают отпирающие импульсы управления на тиристоры Т2 и ТЗ. При этом разрядный ток коммутирующего конденсатора ускоряет включение тиристоров Т2 и ТЗ и способствует выключению тиристоров Т1 и Т4. Затем конденсатор перезаряжается, изменяя свою полярность, и оказывается подготовленным к следующему циклу изменения тока в нагрузке. Недостатки инвертора тока—наличие мощного реактора и необходимость иметь на входе регулятор напряжения.
При питании инвертора от сети переменного тока его можно выполнить без коммутирующих узлов (инвертор с непосредственной связью). Каждая фаза такого инвертора (рис. 5.48, а) связана с каждой фазой сети двумя тиристорами, включенными встречно-параллельно. Поэтому каждую фазу двигателя можно подключить к трехфазной сети в любом сочетании с другой фазой. На рис. 5.48,6 показано образование из напряжения сети с периодом Тс выходного напряжения пониженной частоты с периодом Тм, которое подают на фазы двигателя. Недостатком рассматриваемого инвертора является то, что его максимальная выходная частота меньше частоты сети практически в 2...3 раза.
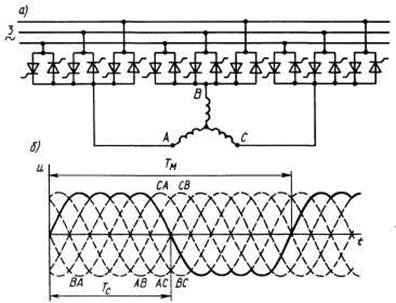
Рис. 5.48. Схема питания трехфазного асинхронного двигателя от
преобразователя частоты с непосредственной связью с сетью переменного тока (а) и графики изменения напряжения, подаваемого на фазу двигателя (б)
Поэтому подобные преобразователи частоты применяют только для питания мощных тихоходных асинхронных двигателей.
Система управления преобразователя частоты. Система управления должна регулировать выходные напряжения и частоту преобразователя по требуемому закону. Как показано выше, очень распространенным является регулирование при постоянном магнитном потоке двигателя Φ и постоянной частоте ротора f2, так как такой закон регулирования обеспечивает близкие к оптимальным условия работы двигателя во всем диапазоне частоты вращения при постоянном моменте нагрузки.
Для поддержания постоянного потока Φ при постоянной частоте ротора f2 необходимо обеспечить, что , так как постоянство Φ = const обусловливает неизменность намагничивающего тока I0≈Iμ=const, а постоянство I2=const и, следовательно, Μ=const — постоянство тока ротора I2. Таким образом, для частотного регулирования асинхронного двигателя можно применить систему управления, структурная схема которой приведена на рис. 5.49, а. Преобразователь частоты ПЧ получает питание от источника постоянного тока ИПТ и подает трехфазное напряжение на статор асинхронного двигателя АД. Система автоматического регулирования должна устанавливать в
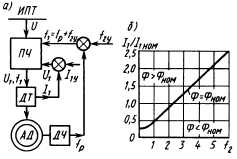
Рис. 5.49. Структурная схема
системы управления асинхронным
двигателем при частотном
регулировании (а) и зависимость
I1=f(f2) при Фm=const (б)
преобразователе ПЧ такие выходное напряжение U1 и частоту f1, чтобы в статоре двигателя проходил заданный ток Il, а ротор имел заданную частоту f2. Для этого система должна иметь два канала управления, один из которых задает U1 в соответствии с измеренным значением тока статора I1, а второй — частоту f2. В нее входят датчики ДТ и ДЧ тока I1 и частоты fp, пропорциональной частоте вращения ротора, и устройства, задающие сигналы уставки I1у и f2у, пропорциональные требуемым значениям тока и частоты f2. При этом частота f1=f2у+fp.
На рис. 5.49, б показана зависимость тока статора от частоты тока в роторе при постоянном магнитном потоке Ф = Фном, построенная для двигателя мощностью 100 кВт. Приведенная кривая соответствует оптимальному закону регулирования, так как при отклонении от нее в область больших токов магнитный поток возрастает и в магнитной цепи возникает повышенное насыщение, а при отклонении от нее в область меньших токов магнитный поток уменьшается, что приводит к снижению электромагнитного момента и возрастанию электрических потерь. Естественно, что специфические условия эксплуатации привода могут внести существенные коррективы в указанный закон регулирования I1 и f2 (например, если двигатель длительно работает с моментами, меньшими номинального).
При повышенных частотах вращения по сравнению с номинальной, как правило, осуществляется закон регулирования при постоянной мощности согласно (5.67). Однако иногда приходится работать в режиме «ослабления поля», когда пропорционально частоте вращения п2 изменяется частота питающего напряжения f1, а первичное напряжение U1 остается неизменным. При этом с повышением частоты f1 уменьшаются магнитный поток и максимальный момент двигателя. Такой метод регулирования используют только в том случае, если максимальная частота вращения незначительно превышает номинальную: nmax≤1,4/nном. При этом снижение максимального момента не слишком велико, а система управления существенно упрощается.
Обновлено 25.10.2010 10:52