

Приведение статических моментов к валу электродвигателя
В простых по устройству механизмах рабочий орган соединен с электродвигателем непосредственно (напрямую).
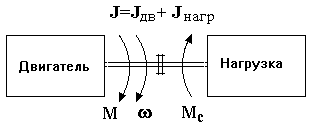
Рис. 1.2. Модель механической части простейшей механической системы
В простой механической системе на рис. 1.2 действуют два момента - электромагнитный момент М, развиваемый двигателем, и момент Мс, создаваемый нагрузкой, а также потерями механической части (трение); каждый момент имеет свою величину и направление.
Например, в электроприводе насоса его крыльчатка закреплена непосредственно на валу электродвигателя. В этом случае статический момент Мс, созданный крыльчаткой насоса, равен полезному электромагнитному моменту М на валу электродвигателя. То есть, передача энергии от электродвигателя к насосу происходит без потерь.
Для выбора двигателя в таком электроприводе по величине статического момента Мс, рассчитывается мощность и по каталогу выбирается подходящий по параметрам двигатель.
В более сложных по устройству механизмах, например, лебедках, брашпилях и т.п. используют передачи (редукторы). В этом случае в передаче возникают потери энергии, в результате чего статический момент механизма и полезный момент двигателя неодинаковы (для совершения работы полезный момент двигателя должен превышать статический момент, создаваемый механизмом).
Механическая часть электропривода может быть сложной кинематической системой с большим количеством различных элементов валов и шестерней со своими моментами и скоростями.
Для сведения любой реальной системы к простейшей модели на рис. 1.2. нужно выполнить ряд операций, называемых приведением моментов и моментов инерции к некоторому выбранному элементу, обычно - к валу двигателя.
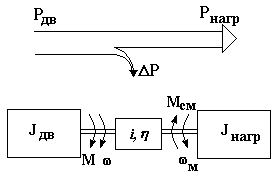
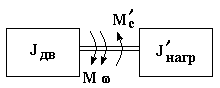
Иными словами, реальную механическую систему, например, показанную на рис. 1.3,а, нужно заметить эквивалентной системой (рис. 1.3,б), так, чтобы эта замена не отразилась на части системы, оставленной без изменений, то есть на двигателе.[Лотоцкий]
a)
б)
Рис. 1.3. К приведению Мст и Jнагр к валу двигателя
Каждый из элементов обладает упругостью, т.е. деформируется под нагрузкой, а в соединениях имеются воздушные зазоры.
В инженерных расчётах можно пренебречь зазорами и упругостью элементов и принять механические связи между элементами абсолютно жёсткими.
При таком допущении движение одного элемента полностью характеризует движение всех элементов устройств электропривода, поэтому движение в электроприводе можно рассматривать на движении одного любого элемента. чил.27
Замена механической системы, в которой элементы с разными массами совершают вращательное и поступательное движения с разными скоростями, на один эквивалентный элемент (звено), движущийся с одной скоростью, называется п р и в е д е н и е м. чек.15
В качестве такого элемента, чаще всего, принимают вал двигателя, а все вращающиеся и поступательно движущиеся элементы приводят к скорости вращения вала двигателя, хотя в общем случае, скоростью приведения может быть скорость любого элемента. Для сохранения неизменными свойств реальной системы, приведение проводится с учётом постоянства запаса кинетической энергии системы до и после приведения.
Расчёт
механической части электропривода
сводится
к расчёту
движения
обобщённого механического элемента,
имеющего
эквивалентную массу с приведенным
моментом инерции ,
на
эту массу воздействует электромагнитный
момент
двигателя
– М
и
(суммарный)
приведенный к
скорости вала двигателя, статический
момент (момент
сопротивления) –
М
,
на
эту массу воздействует электромагнитный
момент
двигателя
– М
и
(суммарный)
приведенный к
скорости вала двигателя, статический
момент (момент
сопротивления) –
М .
.
Статический
момент (момент
сопротивления) механизма
–
М включает
все механические потери в электроприводе,
в том числе и механические потери в
двигателе.чил.28.
включает
все механические потери в электроприводе,
в том числе и механические потери в
двигателе.чил.28.
Так как конечной целью расчёта сложных систем является выбор электродвигателя способного совершать полезную работу, то следует определить момент, который должен развивать двигатель для обеспечения установившегося (статического) режима работы.
Электропривод будет работать в установившемся (статическом) режиме (т.е. с постоянной скоростью), если момент двигателя будет равен по абсолютной величине и противоположно направлен статическому моменту сопротивления механизма. Чек.18