

Тема лекции 10 Механические характеристики электродвигателей план лекции
1.Естественные и искусственные механические характеристики электродвигателей
Жесткостьмеханических характеристик
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика асинхронного двигателя
Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической
характеристикой двигателя, независимо
от рода тока, называют зависимость
угловой скорости вала электродвигателя
ω (далее – двигателя) от электромагнитного
момента двигателя
 ,
т.е зависимость ω (
,
т.е зависимость ω ( ).
).
Здесь
следует сделать важное замечание: в
соответствии с уравнением моментов, в
установившемся режиме
 =
=
 ,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма
–
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма
–
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β – это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода.
β
= (М2
–
М1)/(
ω2
–
ω1)=
Δ / Δω
/ Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β < 0, так как( ω2< ω1,
М1< М2) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристики электродвигателей.
Естественная
механическая
характеристика –
это
зависимость ω( ),
снятаяпри
нормальных условиях работы двигателя,
т.е. при номинальных параметрах
питающей сети и
отсутствии добавочных резисторов в
цепях обмоток двигателей.
),
снятаяпри
нормальных условиях работы двигателя,
т.е. при номинальных параметрах
питающей сети и
отсутствии добавочных резисторов в
цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе – напряжение, при переменном токе – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
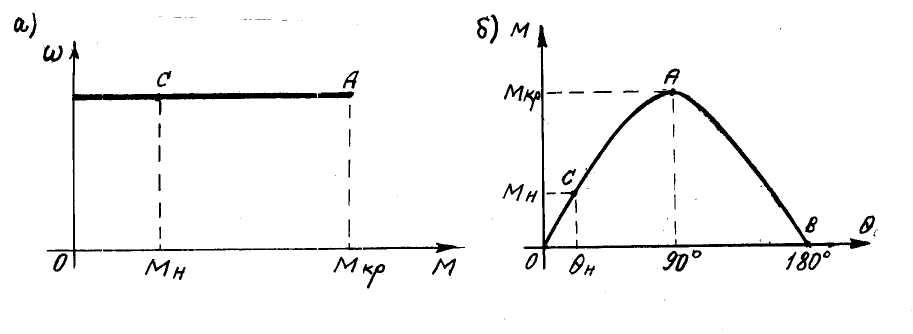
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора