

Различают два основных вида механических характеристик судовых исполнительных механизмов:
Крановые, когда при изменении скорости в широких пределах статический момент не изменяется ( рис. 4.1а, характеристика 1 ).
Такая характеристика описывается уравнением
 (ω)
(ω) =
сonst
(4- 6 )
=
сonst
(4- 6 )
т.е.
статический момент механизма
 не зависит от ω
не зависит от ω скорости дигателя.
скорости дигателя.
Вентиляторные, у которых статический момент механизма пропорционален квадрату скорости ( рис. 4.1а, характеристика 2 ).
Такая характеристика описывается уравнением
 =
=
 + Δ
+ Δ , (4-
7 )
, (4-
7 )
где
 – момент холостого хода, без нагрузки
на валу дигателя ;
– момент холостого хода, без нагрузки
на валу дигателя ;
Δ = сω
= сω – момент, создаваемый рабочим органом
механизма при выполнении полезной
работы (с – постоянный коэффициент, ω
– угловая скорость вала механизма).
– момент, создаваемый рабочим органом
механизма при выполнении полезной
работы (с – постоянный коэффициент, ω
– угловая скорость вала механизма).
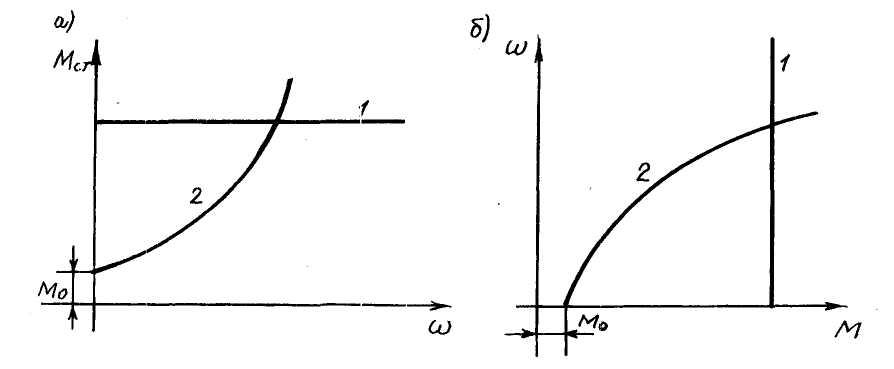
Рис.
4.1. Механические характеристики механизмов
с крановыми характеристиками 1 и
вентиляторными 2: а – в системе координат
 (ω)
момент
функция
скорости ;
б – преобразованные в
системе координат скорость функция
момента ω(
(ω)
момент
функция
скорости ;
б – преобразованные в
системе координат скорость функция
момента ω( ).
).
Крановые характеристики имеют механизмы грузовых кранов, лебедок, брашпилей, т.е. механизмов, работа которых связана с преодолением действия силы тяжести. Статический момент крановых механизмов определяется следующим выражением
 =
GD/2
= const, (
4-8 )
=
GD/2
= const, (
4-8 )
где G – вес груза (у брашпилей – вес якоря с цепью);
D – диаметр грузового барабана(для брашпилей – якорного барабана, барабана швартовной лебёдки).
Вентиляторные характеристики имеют: центробежные насосы вентиляторы, гребные винты, компрессоры и другие механизмы, для которых сопротивление технологической среды (вода, масло, газы) зависит от квадрата скорости рабочего органа (крыльчатка, лопости и тд.).
У
механизмов с вентиляторными
характеристиками условия пуска –
легкие, т.к. при пуске на валу механизма
действует небольшой момент холостого
хода ,
создаваемый только силами трения в
элементах привода, а момент, создаваемыйтрением
о среду равен нулю сω
,
создаваемый только силами трения в
элементах привода, а момент, создаваемыйтрением
о среду равен нулю сω =
0
при
пуске так как
=
0
при
пуске так как
 .
.
Однако
при
увеличении угловой скорости –
 трение лопастей о воздух, воду или
другую среду увеличивается ипо
мере разгона статический момент механизма
резко увеличивается за счет того, что
к моменту холостого хода
трение лопастей о воздух, воду или
другую среду увеличивается ипо
мере разгона статический момент механизма
резко увеличивается за счет того, что
к моменту холостого хода
 ,
добавляется тормозящий момент момент
Δ
,
добавляется тормозящий момент момент
Δ = сω
= сω ,
пропорциональный квадрату скорости.
,
пропорциональный квадрату скорости.
Для изображения механических характеристик двигателей в теории электропривода принято использовать систему координат
ω( ),
),
а для механических характеристик механизмов – «перевернутую» систему координат
 (ω).
(ω).
Применение разных систем координат для двигателей и механизмов создает трудности при рассмотрении электромеханических свойств электропривода, состоящего из электродвигателя и механизма.
Поэтому
на практике для
изображения механических характеристик
двигателей и механизмов принята единая
система координат ω( ),
т.е система, принятая для механических
характеристик электродвигателей.
),
т.е система, принятая для механических
характеристик электродвигателей.
В
этой системе координат
ω( ),
механические характеристики механизмов
показаны на рис. 4.1б.
),
механические характеристики механизмов
показаны на рис. 4.1б.

Рис.4.2
Механические
характеристики исполнительных механизмов
в
системе координат
ω( ):1
– статический момент сопротивления
механизма пропорционален квадрату
угловой скорости; 2 – статический
момент сопротивления механизма
пропорционален угловой частоте вращения;
3 – статический момент сопротивления
механизма не зависит от угловой частоты
вращения вала механизма.
):1
– статический момент сопротивления
механизма пропорционален квадрату
угловой скорости; 2 – статический
момент сопротивления механизма
пропорционален угловой частоте вращения;
3 – статический момент сопротивления
механизма не зависит от угловой частоты
вращения вала механизма.