

Реостатный пуск двигателей с фазным ротором
Асинхронные двигатели с фазным ротором (АД с ФР) пускают в ход с помощью резисторов, включаемых в цепь ротора, что позволяет уменьшить пусковой ток и увеличить пусковой момент двигателя (рис.14.5).
Для
пуска двигателя включают линейный
контактор КЛ, через контакты которого
обмотка статора двигателя подключается
к питающей сети «напрямую». Контакты
КУ1 и КУ2 контакторов ускорения при пуске
должны быть разомкнуты. Тем самым
последовательно в каждую из трех фазных
обмоток ротора вводятся обе ступени
добавочных (пусковых) резисторов R и R
и R .
.

Рис. 14.5 Схема пуска асинхронного двигателя с фазным ротором
Пусковые резисторы увеличивают общее (эквивалентное) сопротивление цепей фазных обмоток ротора, что (см. выше) приводит, с одной стороны, к уменьшению пускового тока, с другой – к увеличению пускового момента.
Когда
двигатель разгонится до скорости 30-40%
номинальной, отключают первую ступень
R ,
для чего замыкают контакты КУ1.
,
для чего замыкают контакты КУ1.
Двигатель
с броском тока продолжает разгоняться,
и при скорости 60-70% номинальной отключают
вторую ступень R ,
для чего замыкают контакты КУ2.
,
для чего замыкают контакты КУ2.
Двигатель
после отключения резисторов R и R
и R продолжает разгоняться до номинальной
скорости.
продолжает разгоняться до номинальной
скорости.
Отключение резисторов можно производить вручную – при помощи контроллеров, или полуавтоматически – при помощи более сложных по устройству магнитных станций. Следует отметить, что, кроме указанных достоинств – увеличенный пусковой момент, меньший пусковой ток, двигатели специального исполнения имеют существенные недостатки:
более сложное устройство обмоток роторов;
наличие щеточного устройства у двигателей с фазным ротором, снижающее надежность двигателя;
худшие эксплуатационные характеристики: меньшие значения коэффициента полезного действия и коэффициента мощности.
На судах из перечисленных выше типов двигателей специального исполнения ограниченное применение нашли двигатели с двумя клетками на роторе – в электроприводах грузовых лебедок ( суда польской постройки типа «Муром» ), и более широкое применение – двигатели с фазным ротором. Их применяют на многих сериях судов в электроприводах грузовых кранов и брашпилей.
Рассмотрим пуск двигателя с фазным ротором
Асинхронные двигатели с фазным ротором применяются при большом статическом моменте на валу, когда асинхронный двигатель с короткозамкнутым (к.з.) ротором не может, при пониженном напряжении, развить достаточный пусковой момент.
 (14-2)
(14-2)
 –сложный
коэффициент ( +АД –Ген );
–сложный
коэффициент ( +АД –Ген );
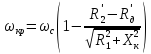
 –скорость
вращения магнитного поля статора, не
зависит от сопротивления цепи ротора
–скорость
вращения магнитного поля статора, не
зависит от сопротивления цепи ротора
 и следовательно скорость вращения
магнитного поля статора не изменяется
при изменении сопротивления цепи ротора
от нулевого значения для естественной
механической характеристики (ЕМХ)
и следовательно скорость вращения
магнитного поля статора не изменяется
при изменении сопротивления цепи ротора
от нулевого значения для естественной
механической характеристики (ЕМХ) до максимального значения
до максимального значения (Рис 14.6).
(Рис 14.6).
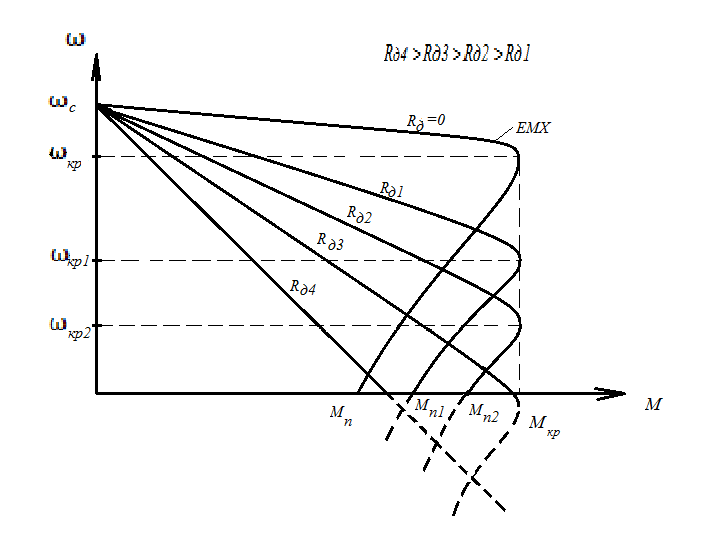
Рис
14.6 Механические характеристики АД с
фазным ротором при разных значениях
сопротивления в цепи ротора
 (
( )
)
Включением
активного сопротивления в цепь ротора
уменьшают толчки пускового тока и
регулируют
 .
Различные добавочные сопротивления в
цепи ротора
.
Различные добавочные сопротивления в
цепи ротора (
( )
позволяют получить семейство механических
характеристик с общей скоростью
вращающегося магнитного поля статора–
)
позволяют получить семейство механических
характеристик с общей скоростью
вращающегося магнитного поля статора–
 , независящей от сопротивления в цепи
ротора.
, независящей от сопротивления в цепи
ротора.
Критический
момент
двигателя (14-2)
 независит
от активного сопротивления в цепи ротора
(на рис. 14.6 величина
независит
от активного сопротивления в цепи ротора
(на рис. 14.6 величина не изменяется при увеличении
не изменяется при увеличении ).
С увеличением
).
С увеличением в цепи ротора увеличивается только
критическое скольжение и уменьшается
критическая скорость, а критический
момент не изменяется.
в цепи ротора увеличивается только
критическое скольжение и уменьшается
критическая скорость, а критический
момент не изменяется.
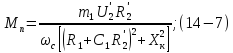
 (14-3)
(14-3)
при


Пусковой
момент
 увеличивается до критического
(максимального) момента
увеличивается до критического
(максимального) момента при выполнении условия:
при выполнении условия:
 ,
,
тогда
критическая скорость становится равной
нулю
 .
.
При
дальнейшем увеличении
 сопротивления
в
цепи ротора критическая скорость
сопротивления
в
цепи ротора критическая скорость
 принимает отрицательные значения, а
пусковой момент
принимает отрицательные значения, а
пусковой момент начинает уменьшаться (рис. 14.6).
начинает уменьшаться (рис. 14.6).
На
механических характеристиках АД при
разных сопротивлениях ротора наблюдается
одно и то же максимальное (критическое)
значение момента
 (рис. 14.6).
(рис. 14.6).
По сравнению с двигателями постоянного тока асинхронные двигатели при прочих равных условиях дольше разгонятся до рабочей скорости и имеют меньший пусковой момент.
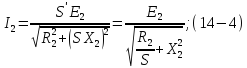
Уравнение
(14-5) для
 соответствует неподвижному ротору с
сопротивлениями
соответствует неподвижному ротору с
сопротивлениями и
и , в котором (роторе) создается ток
, в котором (роторе) создается ток по действием ЭДС
по действием ЭДС так как
так как
 (14-5)
(14-5)
В
начале пуска
 имеет наименьшее значение из-за большого
индуктивного сопротивления, так как
частота тока ротора имееет максимальное
значение (при пуске
имеет наименьшее значение из-за большого
индуктивного сопротивления, так как
частота тока ротора имееет максимальное
значение (при пуске ).
А момент двигателя пропорционален
активной составляющей тока ротора
).
А момент двигателя пропорционален
активной составляющей тока ротора и
и (так как активная составляющая мала).
Большой пусковой ток не опасен для АД
так как пусковой ток
(так как активная составляющая мала).
Большой пусковой ток не опасен для АД
так как пусковой ток содержит большую реактивную составляющую
из-за большого индуктивного сопротивления
ротора
содержит большую реактивную составляющую
из-за большого индуктивного сопротивления
ротора .В
начале пуска при
.В
начале пуска при индуктивное
сопротивление ротора имеет максимальное
значение.
индуктивное
сопротивление ротора имеет максимальное
значение.



 для
АД нормального исполнения
для
АД нормального исполнения
 –для
АД специального исполнения
–для
АД специального исполнения

Рис.14.7 Схема замещения фазы асинхронного двигателя

Рис.
14.8 Электромеханическая I(M)
и механические характеристики (M)
асинхронного двигателя при при разных
значениях сопротивления цепи ротора,
(M)
асинхронного двигателя при при разных
значениях сопротивления цепи ротора,
 – пусковой момент двигателя с
повышенным скольжением
– пусковой момент двигателя с
повышенным скольжением