

Регулирование скорости асинхронного двигателя изменением частоты тока статора
Изменяющийся
по частоте
 ток статора приводит к изменению угловой
скорости поля статора
ток статора приводит к изменению угловой
скорости поля статора
и
пропорционально изменяется скорость
ротора. Из выражения (1-1) следует, что
регулирование скорости двигателя
изменением скорости вращающегося
магнитного поля статора
 происходит без значительного изменения
скольжения и позволяет получать различные
скорости на жестких механических
характеристиках.
происходит без значительного изменения
скольжения и позволяет получать различные
скорости на жестких механических
характеристиках.
С
помощью электромашинных и полупроводниковых
устройств можно плавно изменять частоту
тока статора
 ,
а следовательно и скорость двигателя.
Скорость двигателя можно увеличить
вверх до
,
а следовательно и скорость двигателя.
Скорость двигателя можно увеличить
вверх до
 от номинальной и уменьшать в
от номинальной и уменьшать в раз от номинальной.
раз от номинальной.
Верхний предел скорости ограничивается механической прочностью ротора, нижний – особенностями роботы преобразователей частоты.В настоящее время наиболее целесообразно применение тиранзисторных преобразователей частоты, в которых происходит сначала выпрямление переменного тока частоты сети, а затем инвертирование в переменный ток нужной частоты.
Для
сохранения постоянной (неизменной)
перегрузочной способности двигателя
на всех скоростях и поддержания постоянных
значений КПД и
 ,
одновременно с изменением частоты тока,
необходимо изменять напряжение,
подводимое к двигателю.
,
одновременно с изменением частоты тока,
необходимо изменять напряжение,
подводимое к двигателю.
Перегрузочная
способность лвигателя не будет изменяться
при изменении частоты тока статора,
если отношение критических моментов
двигателя
 при всех частотах тока
при всех частотах тока и соответствующих напряжениях
и соответствующих напряжениях будет равно отношению соответствующих
статических моментов нагрузки
будет равно отношению соответствующих
статических моментов нагрузки .
.
 (16-12)
(16-12)
Подставим в уравнение (16-12) значения критических моментов из известного ранее соотношения:

И получим:
После преобразования получим (1-3):
Где
:
 – статические моменты при скоростях,
соответствующих частотам
– статические моменты при скоростях,
соответствующих частотам и
и ;
;
 и
и
 напряжения при тех же частотах тока
статора.
напряжения при тех же частотах тока
статора.
Из
уравнения (16-13) следует, что с изменением
частоты
 нужно так же изменить и величину
подводимого к двигателю напряжения
нужно так же изменить и величину
подводимого к двигателю напряжения .
Т.е.для
каждой частоты
.
Т.е.для
каждой частоты
 необходимо соответствующее этой частоте
напряжение
необходимо соответствующее этой частоте
напряжение
 .
.
Закон изменения напряжения определяется характером зависимости статического момента от скорости.
Если пренебречь моментом холостого хода рабочего механизма, то уравнение статического момента можно записать в виде

Подставив значения статических моментов (16-14) в уравнение (16-13) получим
 (16-15)
(16-15)
откуда

где
: – относительная частота напряжения,
подаваемого на статор двигателя;
– относительная частота напряжения,
подаваемого на статор двигателя;
 –показатель
степени, определяющий закон изменения
напряжения с изменением частоты тока
статора.
–показатель
степени, определяющий закон изменения
напряжения с изменением частоты тока
статора.
С
изменением частоты тока будут изменяться
синхронная скорость поля статора
 и индуктивные сопротивления обмоток
двигателя.
и индуктивные сопротивления обмоток
двигателя.
Двигатель будет развивать критический момент при критическом скольжении для данной частоты тока

Рассмотрим регулирование напряжения для наиболее распространенных законов изменения нагрузки.
1.Статический момент не изменяется с изменением скорости

При этом уравнение (1-5)

при
обозначим
 – постоянный коэффициент
– постоянный коэффициент
и
получим
или
Из
( )
следует, что подводимое к двигателю
напряжение должно изменятся пропорционально
изменению частоты тока, для сохранения
постоянного отношения
)
следует, что подводимое к двигателю
напряжение должно изменятся пропорционально
изменению частоты тока, для сохранения
постоянного отношения .
При этом критический момент
.
При этом критический момент (в соответствии с (16-18)) остается без
изменений, то есть обеспечивается
постоянная перегрузочная способность
двигателя.
(в соответствии с (16-18)) остается без
изменений, то есть обеспечивается
постоянная перегрузочная способность
двигателя.
Соответствующие изменения напряжения при частотном регулировании обуславливаются необходимостью сохранения величины магнитного потока при разных частотах тока статора.
Если
пренебречь падением напряжения в обмотке
статора то можно считать, что сщгласно
уравнению 14-15 [
 ]
]

Откуда
получаем отношение
 ,
пропорционально потоку
,
пропорционально потоку ,
который должен оставаться постоянным
,
который должен оставаться постоянным
Если
нарушить это условие, т.е. при
 изменять только частоту тока статора
изменять только частоту тока статора ,
то:
,
то:
а)
с уменьшением частоты тока статора
 ,
поток
,
поток будет увеличиваться, это вызоветувеличение
потерь от намагничивающего тока;
будет увеличиваться, это вызоветувеличение
потерь от намагничивающего тока;
б)
с увеличением частоты тока статора
 ,
поток
,
поток уменьшиться, что при неизменном
уменьшиться, что при неизменном – статическом моменте сопротивления
механизма, вызовет увеличение сопротивления
току ротора, (соответственно рост
температуры).
– статическом моменте сопротивления
механизма, вызовет увеличение сопротивления
току ротора, (соответственно рост
температуры).
Таким образом, в обоих случаях двигатель будет перегреваться при моменте на валу, даже меньшем номинального значения.
Из
уравнения
(1-8) следует, что при постоянном статическом
моменте
 ,
, ,
критический момент остается неизменным
,
критический момент остается неизменным ,
а критическое скольжение
,
а критическое скольжение увеличивается с уменьшением частоты,
это вызвано уменьшением индуктивного
сопротивления
увеличивается с уменьшением частоты,
это вызвано уменьшением индуктивного
сопротивления пропорционально
пропорционально .
. .
.
При увеличении критического скольжения критический момент наблюдается при меньшей скорости ротора.
При
низких частотах индуктивное сопротивление
 становится соизмеримым с независящим
от частоты активным сопротивлением
статора
становится соизмеримым с независящим
от частоты активным сопротивлением
статора .
И при низких частотах,падение
напряжения
на сопротивлении
.
И при низких частотах,падение
напряжения
на сопротивлении
 более
чувствительно снижает значение магнитного
потока
и вызывает уменьшение критического
момента двигателя (кривая
более
чувствительно снижает значение магнитного
потока
и вызывает уменьшение критического
момента двигателя (кривая
 и
и на рис.1-1).
на рис.1-1).
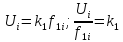
Рис.
1-1 Механическая характеристика
асинхронного двигателя при частотном
регулировании и
 ,
, .
.
При
малых значениях индуктивности
 значительно увеличивается критическое
скольжение. Поэтому для поддержания
постоянного критического момента при
малых частотах напряжения снижают
медленней, чем частоту тока статора.
(Пунктирные кривые для
значительно увеличивается критическое
скольжение. Поэтому для поддержания
постоянного критического момента при
малых частотах напряжения снижают
медленней, чем частоту тока статора.
(Пунктирные кривые для и
и ).
).