

Введение сопротивления в цепь статора
Введение во все фазы статора АД одинаковых активных или индуктивных сопротивлений применяется для улучшения пусковых характеристик, а так же для регулирования угловой скорости двигателя (с помощью индуктивных сопротивлений).
Улучшение пусковых характеристик происходит за счет (ограничения) уменьшения толчков пускового тока мощных двигателей при необходимых пусковых моментах.
Для определения рабочего тока двигателя используем упрощенную схему замещения:
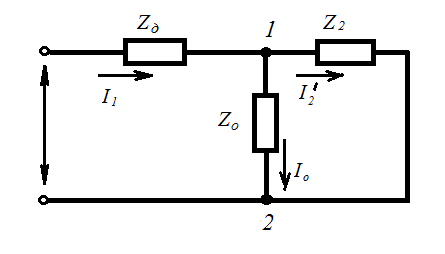
Рис.14.10
Схема замещения фазы асинхронного
двигателя при включении добавочного
сопротивления
 в цепь статора.
в цепь статора.
В
общем
случае
 – добавочное сопротивление включает
индуктивную и активную составляющую.
Добавочное сопротивление включено
перед обмоткой статора.
– добавочное сопротивление включает
индуктивную и активную составляющую.
Добавочное сопротивление включено
перед обмоткой статора.
Ток в добавочном сопротивлении:
 (14-9)
(14-9)
Напряжение
 между точками 1 и 2, это напряжение
намагничивающей цепи и рабочего контура
(приведенного сопротивления ротора).
между точками 1 и 2, это напряжение
намагничивающей цепи и рабочего контура
(приведенного сопротивления ротора).
 (14-10)
(14-10)
Где
 – напряжение сети, приложенное к фазе
статора.
– напряжение сети, приложенное к фазе
статора.
Получим
ток рабочего контура
 – (приведенный к статору ток ротора):
– (приведенный к статору ток ротора):

Подставив
значение тока
 –в
уравнение электромагнитного момента:
–в
уравнение электромагнитного момента:
 (14-12)
(14-12)
Можно
построить механические характеристики
двигателя при включении в цепь статора
добавочного активного
 или
или
 индуктивного
сопротивления.
индуктивного
сопротивления.
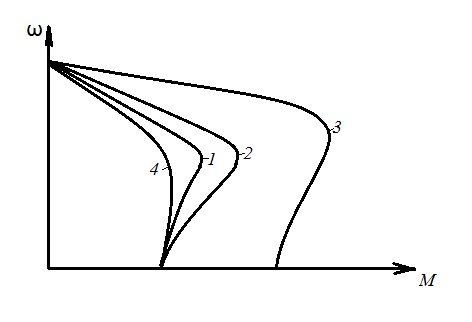
Рис.14.11 Механические характеристики асинхронного двигателя при включении в цепь статора: 1 – активного сопротивления, 2 – индуктивного сопротивления, 3 – естественная характеристика, 4 – при пониженном напряжении сети.
Значение
сопротивления, включаемого в цепь
статора, определяется пусковым током
при пониженном напряжении
 .Это
ток
.Это
ток
 ,
который желательно иметь при пуске и
его можно
представить
как часть
,
который желательно иметь при пуске и
его можно
представить
как часть
 от тока прямого пуска
от тока прямого пуска (или нормального пуска):
(или нормального пуска):

Включаемые в цепь статора добавочные сопротивления определяются следующими выражениями:
а) в случае включения активного сопротивления в цепь статора для двигателей мощностью менее 50квт
 (14-13)
(14-13)
б)или в случае включения индуктивного сопротивления сопротивления в цепь статора для двигателей мощностью более 50квт
где
:

 .
.
Для
более точного определения пускового
значения косинуса
 существует
следующее выражение (14-15).
существует
следующее выражение (14-15).
 (14-15).
(14-15).
где:
 косинус
номинальный
косинус
номинальный
 –кратность
пускового момента
–кратность
пускового момента
 Iп/
Iн
–
кратность
пускового тока
Iп/
Iн
–
кратность
пускового тока
 –отношение
потерь в меди статора к суммарным потерям
в номинальном режиме (можно принять
–отношение
потерь в меди статора к суммарным потерям
в номинальном режиме (можно принять
 )
)
 к.п.д.
двигателя при номинальном режиме
к.п.д.
двигателя при номинальном режиме
 номинальное
скольжение.
номинальное
скольжение.
Из
механических характеристик следует,
что с введением в цепь статора добавочных
сопротивлений уменьшаются критические
моменты и критическое скольжение, кроме
того, активное сопротивление повышает
 при пуске и увеличивает потери энергии.
при пуске и увеличивает потери энергии.
Для двигателей мощностью более 50кВт, с целью уменьшения пусковых токов, в цепь статора включают индуктивное сопротивление.
При пуске с помощью индуктивного сопротивления потери энергии уменьшаются, а вместе с ним уменьшается и нагрузка на первичные двигатели судовых генераторов.
Недостатком обоих методов пуска (введением активного или индуктивного сопротивления в цепь статора) является уменьшение напряжения, подаваемого на обмотку статора и как следствие снижение пускового момента. Поэтому эти методы пуска применяют для механизмов, имеющих незначительные статические моменты сопротивления при пуске это насосы, вентиляторы, компрессоры.
Кратность пускового момента:

Значение индуктивного сопротивления выбирают таким образом, чтобы получить:

Тогда
для двигателя с номинальным скольжением
 пусковой момент будет
пусковой момент будет .
.