

4.2. Реверс изменением направления тока в обмотке якоря
Для реверса двигателя первым способом применяют схему реверсивного мостика, состоящую из контактов В1, В2 «Вперёд» и H1, H2 «Назад» (рис. 13.4.).
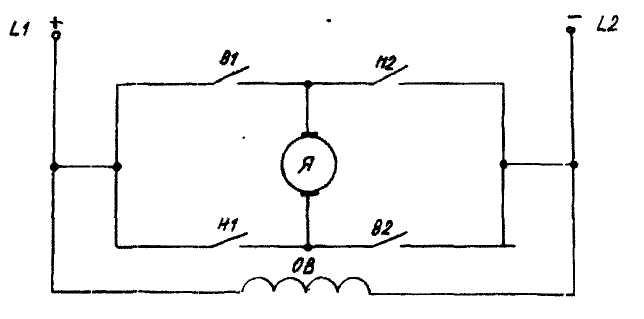
Рис. 13.4. Схема реверса двигателя постоянного тока изменением направления тока в обмотке якоря
Пары контактов В1-В2 и Н1-Н2 замыкаются поочерёдно. При направлении «Вперёд» замкнуты контакты В1 и В2, цепь тока через обмотку якоря такая: «плюс» - В1 – обмотка якоря - В2 - «минус».
При направлении «Назад» замкнуты контакты H1 и Н2, цепь тока через обмотку якоря такая: «плюс» - H1 - обмотка якоря - Н2 - «минус».
Таким образом, при работе «Вперёд» ток через обмотку якоря протекал в направлении сверху вниз, при работе «Назад» - снизу вверх. При этом направление тока в параллельной обмотке возбуждения не изменялось.
Реверс изменением направления тока в параллельной обмотке возбуждения
Для реверса двигателя вторым способом применяют ту же схему реверсивного мостика, однако, меняют местами обмотку якоря и обмотку возбуждения (рис. 13.5).
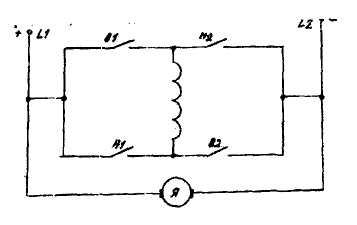
Рис. 13.5 Схема реверса двигателя постоянного тока изменением направления тока в обмотке возбуждения
При направлении «Вперёд» замкнуты контакты В1 и В2, цепь тока через обмотку возбуждения такая: «плюс» - В1 - обмотка возбуждения - В2 - «минус».
При направлении «Назад» замкнуты контакты H1 и Н2, цепь тока через обмотку возбуждения такая: «плюс» - H1 - обмотка возбуждения - Н2 - «минус».
Таким образом, при работе «Вперёд» ток через обмотку возбуждения протекал в направлении сверху вниз, при работе «Назад» - снизу вверх.
При этом направление тока в обмотке якоря не изменялось.
Однако этот второй способ на практике не применяют из-за недостатков:
при переключении контактов В1, В2 и H1, H2 существует момент времени, когда контакты К1, К2 уже разомкнулись, а контакты Н1,Н2 ещё не замкнулись. В этот момент ток в обмотке возбуждения равен 0, поэтому магнитный поток Ф, а значит, и противоЭДС обмотки якоря Е = k*ω*Ф = 0.
При этом ток якоря двигателя увеличивается до значения
I =
(U
– E
)
/ R
=
(U
– E
)
/ R = (
U
– 0 ) / R
= (
U
– 0 ) / R =
U
/ R
=
U
/ R =
I
=
I ,
,
который в десятки раз больше номинального, что недопустимо;
2. одновременно в обмотке возбуждения индуктируется ЭДС самоиндукции
е =–
LdI
=–
LdI /
dt
/
dt
которая в десятки раз больше напряжения сети из–за крайне малого значения времени dt, в течение которого ток возбуждения убывает до нуля (т.к. контакты В1, В2 и Н1,Н2 переключаются практически мгновенно).
Под действием этой ЭДС происходит пробой изоляции витков обмотки возбуждения.
Следует обратить внимание на то, что при изменении полярности напряжения питающей сети двигатель постоянного тока не реверсирует.
Это объясняется тем, что при переброске концов одновременно изменяется направление тока как в обмотке двигателя, так и в параллельной обмотке возбуждения, а знак электромагнитного момента не изменяется:
М'
= с (–
I )(–
Ф)
= М
)(–
Ф)
= М
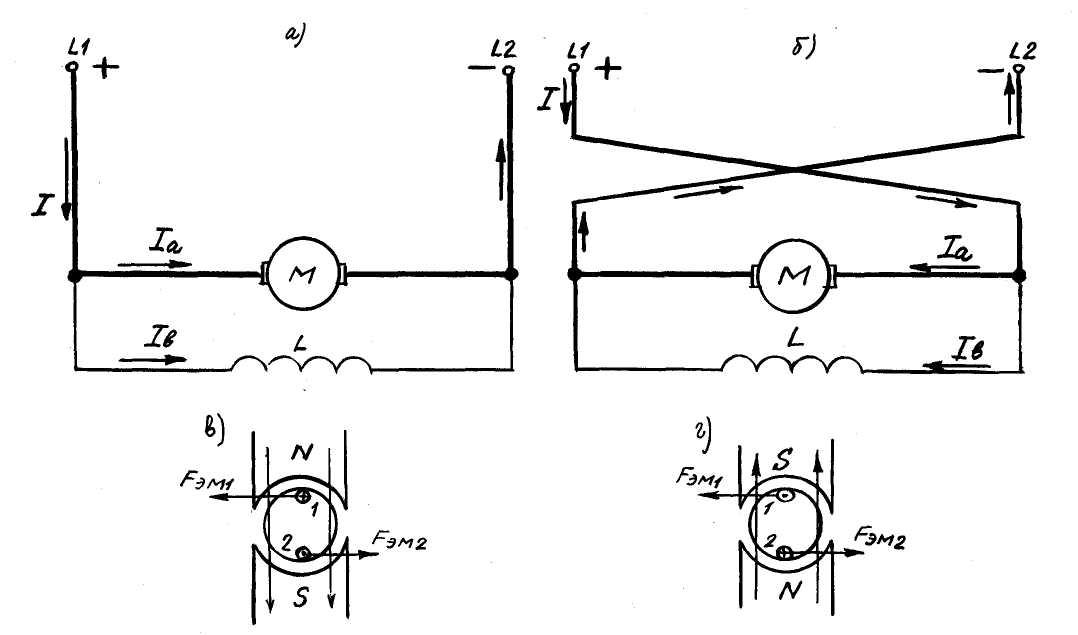
Рис. 13.6 Схема включения двигателя постоянного тока при прямой (а) и обратной (б) полярности напряжения питающей сети
На
рис. 13.6(а) а ток якоря I и
ток возбуждения I
и
ток возбуждения I протекают
в направлении слева направо, а при
изменении полярности – в направлении
справа налево (рис. 13.6 б).
протекают
в направлении слева направо, а при
изменении полярности – в направлении
справа налево (рис. 13.6 б).
Реверс при этом не происходит.
Сказанное подтверждается на рис 13.6(в) и 13.6(г).
На
рис. 13.6(в) произвольно выбрана полярность
полюсов N
и S
и направление тока в верхнем проводнике
(крестик) и нижнем (точка). Направление
электромагнитных сил F и
F
и
F
 найдено по правилу левой руки. Якорь
вращается в направлении против часовой
стрелки.
найдено по правилу левой руки. Якорь
вращается в направлении против часовой
стрелки.
Если изменить полярность питающей сети, то одновременно изменится полярность полюсов (на рис. 13.6г верхний полюс – S, а нижний – N) и направление тока в обмотке якоря (в верхнем проводнике – точка, в нижнем – крестик ).
Применяя
правило левой руки, находим, что
направление электромагнитных сил F и
F
и
F
 не
изменилось, реверс не произошел.
не
изменилось, реверс не произошел.