

Статические моменты судовых механизмов
Статический момент (момент сопротивления) пропорционален частоте вращения (рис.4.2, кривая 2). В такой режим входит двигатель постоянного тока при динамическом торможении, когда якорь двигателя замкнут на резистор, а ток возбуждения не изменяется.
Статический момент (момент сопротивления) не зависит от частоты вращения (кривая 3). Характерно для подъемных кранов, лебедок, поршневых насосов при подъеме воды на постоянную высоту, транспортеров, конвееров с постоянной передвигаемой массой. Для пуска и ускорения таких механизмов двигатель должен развивать пусковой момент значительно больший их статического момента.
Данные
о статическом моменте (моменте
сопротивления)
механизма приводятся в технической
инструкции. Для некоторых механизмов
статический момент (момент
сопротивления) зависит от траектории движения
исполнительного механизма (от угла
поворота). Например, в поршневом
компрессоре, ножницах для резки металла,
приводе рулевого устройства (Рис.4.3).
зависит от траектории движения
исполнительного механизма (от угла
поворота). Например, в поршневом
компрессоре, ножницах для резки металла,
приводе рулевого устройства (Рис.4.3).

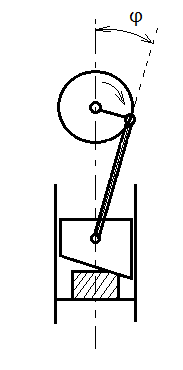
Рис
4.3 Механическая характеристика поршневого
компрессора. Статический момент
сопротивления
 зависит от траектории движения
исполнительного механизма.
зависит от траектории движения
исполнительного механизма.
Иногда
статический момент изменяется из-за изменения свойств
обрабатываемого механизмами материала
(вещества). И закономерности изменения
момента сопротивление от скорости
нельзя выразить ни графически, ни
аналитически (например камнедробилки,
бетономешалки).
изменяется из-за изменения свойств
обрабатываемого механизмами материала
(вещества). И закономерности изменения
момента сопротивление от скорости
нельзя выразить ни графически, ни
аналитически (например камнедробилки,
бетономешалки).
Для электродвигателей угловая скорость и элетромагнитный момент связаны одинаковой зависимостью и обуславливают друг друга.
Статические моменты судовых механизмов могут быть функциями различных величин и поэтому признаку делятся на пять классов.
Моменты,
не зависящие от параметров движения
 = const
(для грузоподъемных механизмов).
= const
(для грузоподъемных механизмов).
Моменты, зависящие от скорости:
 =
f(ω)
для электромеханических преобразователей.
Центробежных насосов, вентеляторов.
=
f(ω)
для электромеханических преобразователей.
Центробежных насосов, вентеляторов.Моменты, зависящие от пути (угла поворота)
 =f(α).
Для шпилей, брашпилей.
=f(α).
Для шпилей, брашпилей.Моменты, зависящие от скорости и угла поворота.
 =f(
=f( ).
Для электромеханических рулевых
устройств.
).
Для электромеханических рулевых
устройств.Моменты, зависящие от времени
 = f
(t).
Для
буксирных лебедок.
= f
(t).
Для
буксирных лебедок.
В общем случае статический момент механизма выражается уравнением,
 +
(
+
( )
) (4-9)
(4-9)
где:
 –начальный
статический момент, создаваемый трением.
–начальный
статический момент, создаваемый трением.
 –номинальный
момент нагрузки, соответствующий
номинальной
–номинальный
момент нагрузки, соответствующий
номинальной
скорости
 .
.
x – коэффициент нагрузки (выбирается в зависимости от характера нагрузки).

 показатель
степени, определяющий характер зависимости
показатель
степени, определяющий характер зависимости
 от
от
 угловой
скорости
угловой
скорости
 ,(
,( 1
<
1
< < 2) выбирается от
< 2) выбирается от 1
до +2( для вентиляторов 2).
1
до +2( для вентиляторов 2).
 (4-10)
(4-10)
Изображение характеристик исполнительного механизма при работе в электроприводе с разными двигателями
Все электродвигатели обладают свойством саморегулирования (подробно свойство саморегулирования будет рассмотрено далее) и развивать момент равный моменту сопротивления механизма [гер 444].
Любой производственный механизм после включения электродвигателя, через некоторое время, входит в установившийся режим при этом скорость двигателя устанавливается постоянной.
Установившемуся
режиму соответствует равновесие
статического момента сопротивления
механизм – и электромагнитного момента двигателя
–
и электромагнитного момента двигателя
–
 при
определённой скорости,
т.е.
при
определённой скорости,
т.е.

После достижения равновесия между моментами в электроприводе устанавливается постоянная или установившаяся скорость движения.
Значение
установившейся
скорости
легко определить графически, если
механическую характеристику
 механизма (например вентилятора –
кривая 1 (рис 4.2) построить в осях
механизма (например вентилятора –
кривая 1 (рис 4.2) построить в осях , вместо
, вместо (на графике
(на графике (
( )
в
одном масштабе
(рис. 4.4).
)
в
одном масштабе
(рис. 4.4).
На рисунке 4.4 приведены механические характеристики трёх видов двигателей (синхронного СД, асинхронного АД, двигателя постоянного тока ДПТ) и механизма с вентиляторной механической характеристикой . Точки пересечения характеристик (а, в, с) соответствуют установившемся скоростям валов двигателей и вентилятора при подключении вентилятора отдельно к каждому из двигателей.
Механическая
характеристика двигателя и механизма
позволяет определить скорость, момент,
мощность и диапазон
регулирования скорости D
=
 , если её нужно регулировать двигателем.
, если её нужно регулировать двигателем.
Механическая характеристика необходима так же для определения времени перехода от одной скорости к другой, например, при пуске и остановке, так как от времени перехода зависит производительность и экономичность показателей всего устройства.
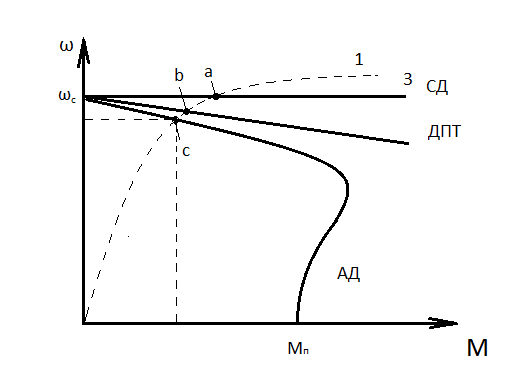
Рис.
4.4 Механические характеристики

Любые
изменения
нагрузки
рабочего механизма, включение или
выключение двигателя, подключение
резисторов в силовую цепь двигателя,
изменение напряжения и т.д. – все эти
изменения приводят к ускорению
 или замедлению
или замедлению скорости привода ипоявлению
динамического момента
скорости привода ипоявлению
динамического момента
 ,
которыйнагружает
либо разгружает
вал
электродвигателя
,
которыйнагружает
либо разгружает
вал
электродвигателя
 .
(4-11)
.
(4-11)
Что бы определить возможные перегрузки двигателя (по моменту и мощности) во времени нужно знать, как изменяется момент, и мощность двигателя во времени (в течение рабочего цикла), то есть иметь нагрузочную диаграмму элетропривода.