

Тема лекции 2 Силы и моменты, действующие в системе электропривода план лекции
Определение «статический момент»илимомент сопротивления механизма.
Виды статических моментов (активный и реактивный)
Приведение статических моментов к валу электродвигателя
Расчёт мощности электродвигателя на примере упрощенного электропривода лебёдки
Приведение моментов инерции к одной оси вращения.
Приведение масс, движущихся поступательно, к валу двигателя
Виды статических моментов (активный и реактивный)
Определение «статический момент»
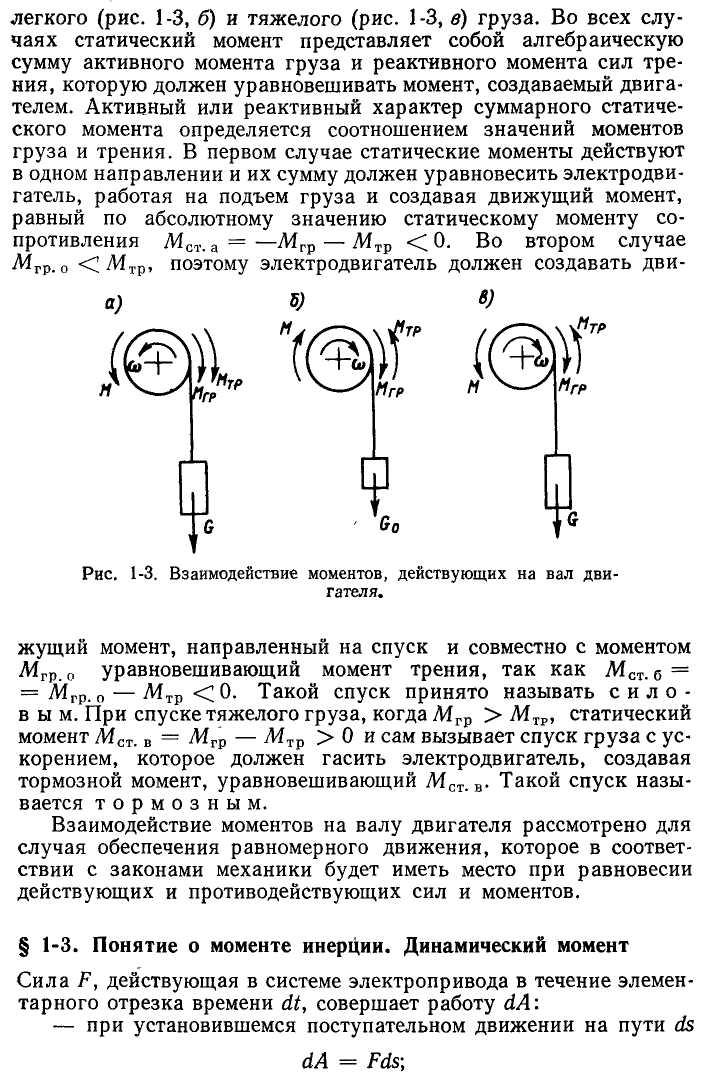
В состав каждого электропривода входит рабочая машина, например, насос, грузовая лебедка, рулевая машина и т.п.
Каждая такая машина имеет рабочий орган, предназначенный для выполнения полезной работы. К рабочим органам относятся: у насоса - крыльчатка, у грузовой лебедки – крюк для подвески груза (гак), у рулевого устройства – перо руля и т.п.
Рабочая машина соединяется с двигателем через передаточное устройство (редуктор, понижающий или повышающий скорость врашения вала двигателя, ремень, муфту, и т.д.). В узлах рабочей машины, в передаточном устройстве, а также и в двигателе при движении, возникают силы трения и инерции.
Силы трения и инерции препятствуют передаче механической энергии от двигателя к рабочему органу, снижают коэффициент полезного действия электропривода и создают момент, направленный противоположно электромагнитному моменту двигателя.
Момент, включающий затраты механической энергии двигателя на выполнение полезной работы и преодоление всех механических потерь в системе электропривода, (в том числе и механических потерь в двигателе трение в подшипниках, инерцию вращющихся частей двигателя) называют статическим моментом( или в некоторых литературных источниках его называют моментом сопротивления)
Таким образом, к валу электродвигателя в системе электропривода приложены два момента:
1) электромагнитный момент, создаваемый двигателем;
2) статический момент (момент сопротивления) механизма, создаваемый рабочей машиной (исполнительным механизмом).
Важно подчеркнуть, что статический момент (момент сопротивления) механизма имеет механическую природу.
Статический момент (момент сопротивления) механизма включает две составляющих, соответствующих:
полезной работе, выполняемой рабочей машиной (например в подьёмнике это преодоление силы тяжести, создаваемой весом груза, для вентилятора, компрессора это преодоление сил трения крыльчатки в технологической среде);
работе, затраченной на преодоление сил трения и инерции всех устройств электропривода: в редукторах, в муфтах, соединяющих вал двигателя с исполнительным механизмом, шкивах, ремнях, цепях и т.д. (в том числе и на преодоление механических потерь в электродвигателе, возникающих за счёт трения в подшипниках и инерции ротора или якоря).
Полезная работа совершается призводственным механизмом во время
выполнения соответствующей технологической операции. При совершении полезной работы происходит деформация материала (резка, ковка и т.д.) или изменяется потенциальная энергия тел (например в подьемных механизмах при подъёме или спуске грузов).
В некоторых механизмах совершение полезной работы происходит при незначительном превышении момента двигателя по сравнению с моментом трения и инерции (например передвижение крана по горизонтальным напраляющим и т.п.).
Работа трения и все механические потери, в призводственном механизме, при расчётах учитывается коэффициентом полезного действия (КПД) механических передач привода.
Например,
при подьёме груза на высоту
h
считают, что силы трения как бы увеличивают
вес груза на некоторое дополнительное
значение
на высоту
h
считают, что силы трения как бы увеличивают
вес груза на некоторое дополнительное
значение
 .
Тогда работа
А
при подьёме
груза записывается следующим образом:
.
Тогда работа
А
при подьёме
груза записывается следующим образом:
А
= h( +
+ ).
(2.1)
).
(2.1)
В
насосах потери учитываются
некоторой фиктивной доплнительной
высотой подачи
 .
Момент, создаваемый силами трения,
всегда направлен против движущего
момента привода.
.
Момент, создаваемый силами трения,
всегда направлен против движущего
момента привода.
Направление действия статических моментов
В зависимости от выполняемой электроприводом операции каждый из моментов может быть как движущим, так и тормозным.
Движущими или положительными называют моменты, направленные в сторону движения и вызывающие или способствующие движению.
Тормозные или отрицательные моменты направлены навстречу движению и препятствуют ему.
Различают два вида статических моментов: активные (потенциальные) и реактивные.
Активным (или потенциальным) статическим моментом называют момент, который вне зависимости от направления движения всегда действует в одну сторону. Активные моменты называют потенциальными, так как они связаны с изменением потенциальной энергии. Такие моменты создают, например: масса поднятого груза, силы упругости предварительного сжатых, растянутых или скрученных упругих пружин .
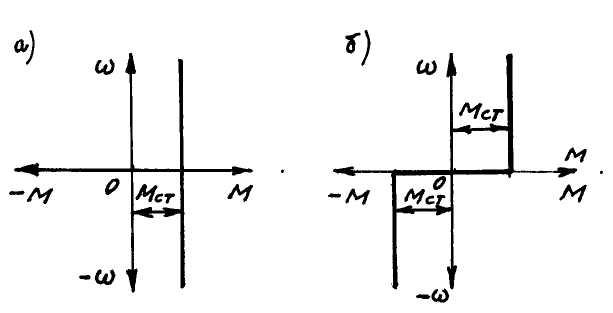
Рис. 1.2. Активный (а) и реактивный (б) статический моменты
В системе координат ω (М) связь угловой скорости ω и статического активного момента М показана при помощи вертикальной линии, проходящей через 1-й и 4-й квадранты (рис. 1.2, а).
Активный
статический
момент –М ,созданный подвешенным грузом определяется
следующей формулой
,созданный подвешенным грузом определяется
следующей формулой
М =GR
= const,
=GR
= const,
Где: G – вес груза; R – радиус барабана лебедки.
Активный статический момент имеет одно и то же значение при любой скорости, в том числе при скорости, равной нулю. Кроме того, направление этого момента не зависит от направления перемещения груза (вверх или вниз), это объясняется тем, что направление действия силы тяжести груза не зависит от того, поднимают, или опускают груз.
Реактивным статическим моментом называют момент, возникающий как реакция среды на движение электромеханической системы. Реактивный момент действует только во время движения и всегда навстречу ему. Поэтому при изменении направления движения реактивный момент изменяет направление действия и во всех случаях будет тормозным (отрицательным).
Реактивный момент создают силы трения, например, трение крыльчатки вентилятора о воздух, трение шестерней в редукторе и т.п.
В системе координат ω(М) связь угловой скорости ω и статического момента М показана при помощи вертикальных линий, проходящих через 1 –й и 3–й квадранты (рис. 1.2, б).
В общем случае статический момент представляет собой алгебраическую сумму моментов во всех частях рабочей машины. Если в электроприводе вентилятора создается только статический реактивный момент, то в электроприводе лебедки действую одновременно два момента – активный, созданный подвешенным грузом, и реактивный, созданный силами трения в редукторе и в двигателе.
Поэтому в общем случае статический момент находится как алгебраическая сумма реактивного и активного моментов, т.е.
М
 = ± М
р ± М
а. (2.2)
= ± М
р ± М
а. (2.2)