

5.3. Промышленные роботы
Для замены труда людей на тяжелых физических работах известный писатель К. Чапек в 1920 г. в своей фантастической пьесе RUR (Россумовские универсальные роботы) предложил использовать механических рабочих-роботов. Название «робот» образовано от чешского слова «robota», что означает тяжелый подневольный труд. Идею создания робота породило стремление заменить человека на тяжелых работах. Поэтому можно определить робот как автомат, осуществляющий механические действия, подобные действиям человека при выполнении физической работы.
Технико-экономическое и социальное значение применения промышленных роботов. В условиях ускоренного научно-технического прогресса, когда происходит частая смена объектов производства и повышаются требования к качеству продукции, технологические системы должны быть быстропереналаживаемыми на выпуск новой продукции по более прогрессивной технологии. В этих условиях использование промышленных роботов на основных технологических операциях, на вспомогательных и транспортных работах позволяет создавать многофункциональные, легко переналаживаемые технологические системы. Такие системы образуют принципиально новые технические средства, способные оперативно реагировать при изменении объектов производства.
Применение промышленных роботов в автоматизированных технологических системах позволяет освободить человека от непосредственного участия в производственном цикле. Замена человека роботом облегчает переход на двух- и трехсменную работу, что существенно повышает степень использования технологического оборудования. Широкие возможности открывает применение роботов на пути создания принципиально новых технологических процессов, которые не будут связаны с ограниченными физическими возможностями человека (грузоподъемности, быстродействия, повторяемости и т. д.).
В этих условиях требуется разработка новых принципов организации и управления работой технологической системы на базе применения ЭВМ и микропроцессорной техники.
Важное социальное значение применения роботов состоит не только в повышении культуры производства, но и в оздоровлении условий труда. Замена ручного труда машинным с участием промышленных роботов приведет к ликвидации производственного травматизма и многих профзаболеваний.
Социальное значение использования роботов состоит в том, что реализация целевой функции общественного производства, направленного на всестороннее развитие личности, требует расширения фонда свободного времени. При выполнении этого условия может происходить реальное развитие потребностей и их удовлетворение. При использовании достижений НТР свободное время станет действительным мерилом богатства общества.
Классификация промышленных роботов. Промышленные роботы классифицируются по назначению, конструктивным параметрам, способу управления, по быстродействию и точности движений. Классификационные деления представлены в табл. 5.1.
Таблица 5.1
Классификация промышленных роботов
Классификационный признак |
Классификационные деления |
|
Группа |
Тип, параметр |
|
Назначение
|
Основные, вспомогательные |
Универсальные, специализированные, специальные |
Конструктивные показатели
|
Тип приводов
Грузоподъемность
Число манипуляторов
Параметры рабочей зоны
Подвижность Способ размещения
Исполнение
|
Пневматический, гидравлический, электрический Сверхлегкие (до 1 кг), легкие (св. 1 до 10 кг), средние (св. 10 до 200 кг), тяжелые (св. 200 до 1000 кг), сверхтяжелые (св. 1000 кг)
Одноманипуляторные, двухманипуляторные и т. д.
Прямоугольная, цилиндрическая, сферическая, угловая
Подвижные, стационарный Напольные, подвесные, встраиваемые
Нормальное, пылезащитное, влагозащитное и др. |
Способ управления
Быстродействие
Точность
|
Программный, адаптивный, интеллектуальный
Позиционирование, отработка заданной траектории |
Позиционное, контурное
Малое (до 0,5 м/с), среднее (св. 0,5 до 1 м/с), высокое (св. 1,0 м/с)
Малая (св. 1 мм), средняя (от 0,1 до 1 мм), высокая (до 0,1 мм)
|
В зависимости от характера выполняемых функций в ходе реализации технологического процесса промышленные роботы делятся на основные и вспомогательные. Если назначение робота связано с выполнением основной технологической операцией, т. е. с изменением состояния предмета труда (сварка, пайка, сборка и т. п.), то такие роботы принято считать основными. Роботы, выполняющие вспомогательные технологические приемы (установка заготовок в приспособление, удаление отходов из рабочей зоны прессов, контроль размеров и т. п.), составляют группу вспомогательных автоматов.
Основные и вспомогательные роботы по степени универсальности делятся на универсальные, специализированные и специальные. Универсальные роботы предназначены для выполнения различных технологических операций и могут работать в различных технологических процессах, с различными видами оборудования. Универсальные роботы могут, например, устанавливать заготовку на токарный станок, производить разливку металла в формы и выполнять окраску изделий.
Специализированные промышленные роботы выполняют однородные технологические операции и приемы в определенном параметрическом диапазоне (например, обслуживание штамповочного пресса или токарного станка).
Специальные роботы предназначены для выполнения только конкретной технологической операции или приема (например, сборочный робот для сочленения двух деталей или для установки камня в часовой механизм).
Широкие технические возможности универсальных роботов отражаются, как правило, на их высокой стоимости: чем выше специализация промышленного робота, тем ограниченнее его технические возможности и ниже стоимость.
В роботах нашли применение все известные типы приводов: пневматические, гидравлические и электрические. В некоторых конструкциях роботов имеются комбинированные приводы: пневмогидравлические, пневмоэлектрические и т. п. В комбинированных приводах максимально используются достоинства отдельных типов приводов и компенсируются их недостатки.
Основными исполнительными устройствами промышленных роботов являются манипуляторы - многозвенные механизмы с управляемыми приводами, по всем степеням подвижности. Манипуляторы робота под действием его системы управления совершают движения, подобные движениям рук человека в его трудовой деятельности. В зависимости от конструктивного построения технологической система и характера выполняемых роботами действий их конструкции могут быть выполнены с одним или несколькими одинаковыми манипуляторами. Большинство промышленных роботов имеет один манипулятор.
Параметры рабочей зоны манипулятора определяют область его пространства, в пределах которой робот может осуществлять рабочие действий. Рабочая зона манипулятора - это пространство, в котором находится его рабочий орган при всех возможных положениях звеньев манипулятора. Форма рабочей зоны определяется типом системы координат, в которой осуществляется движение рабочего органа манипулятора, и числом степеней подвижности манипулятора (рис. 5.6).
По способу управления промышленные роботы делятся на программные, адаптивные и интеллектуальные.
Роботы с программным управлением работают по заранее заданной жесткой программе. Они не реагируют на окружающую их обстановку и монотонно выполняют программные циклы. Это так называемые роботы первого поколения.
Роботы с адаптивным управлением работают по заранее заданному алгоритму управления. Они имеют средства очувствления (техническое зрение, устройства ориентации, датчики усилий и т. д.) и реагируют на изменение окружающей обстановки и меняющиеся условия работы, разрабатывают программу управления по обходу препятствий, выбору необходимых деталей и т. д. Такие роботы составляют группу роботов второго поколения.
Интеллектуальное управление наряду с очувствлением и развитой системой обработки внешней информации имеют внутреннюю систему самообучения, которая выбирает и запоминает наиболее эффективные программные приемы выполнения рабочих действий. Такая развитая система управления наделяет робот искусственным интеллектом. Эта группа роботов относится к третьему поколению.
Быстродействие и точность являются главными показателями работы роботов. Эти параметры взаимосвязаны и характеризуют динамические свойства роботов. Классификационные деления по быстродействию и точности приведены в табл.5.1. Большинство (около 80 %) современных роботов имеет среднее быстродействие, а оставшаяся часть их общего парка - высокое быстродействие. Быстродействие робота определяет, с одной стороны, производительность технологической системы, а с другой - точность. Чем выше быстродействие робота, тем выше его производительность, но ниже точность. Быстродействие современных роботов является недостаточным, его требуется увеличить в 2 - 3 раза с сохранением необходимой точности работы.
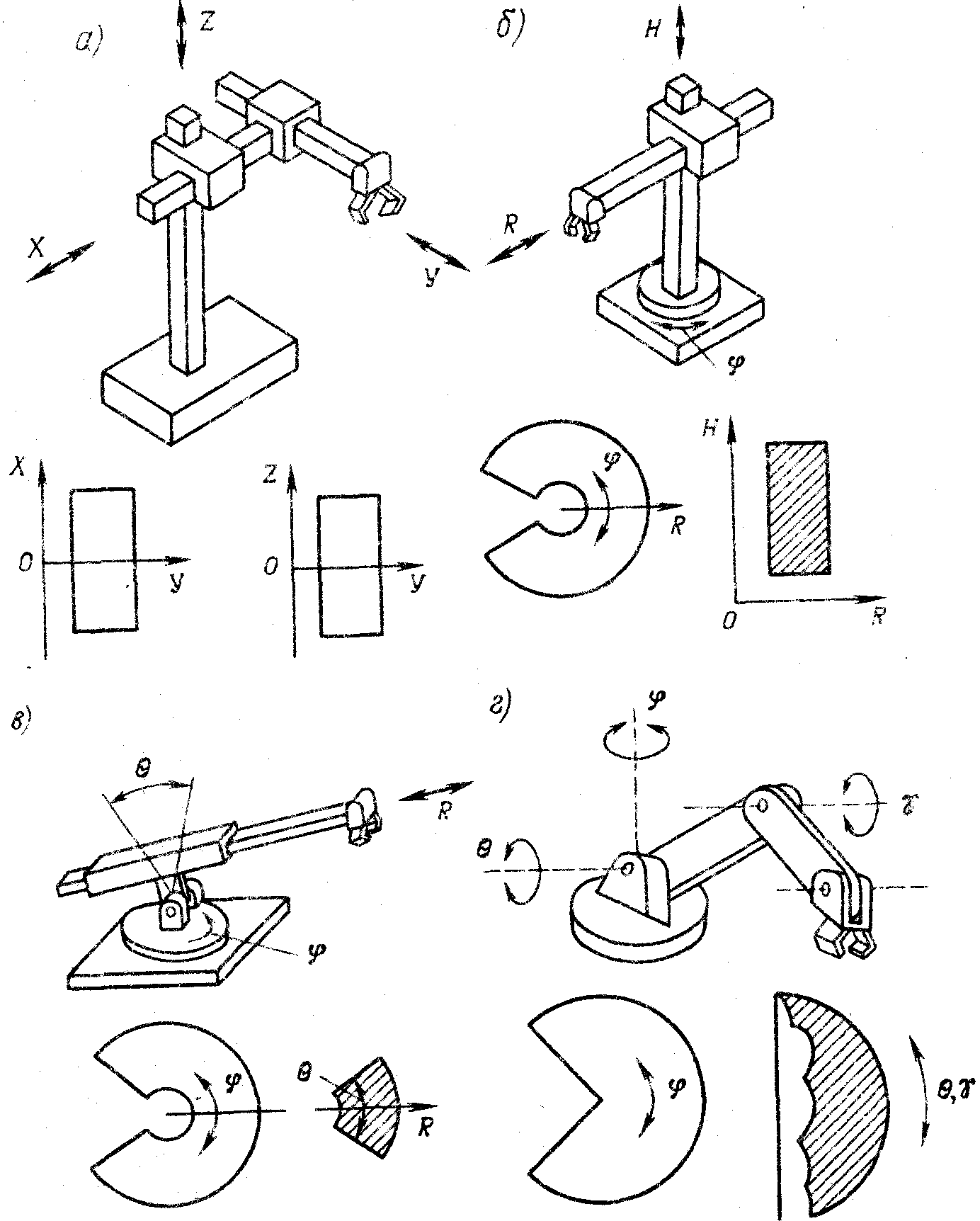
Рис. 5.6. Схемы и рабочие зоны манипуляторов
Точность манипулятора выражается результирующей погрешностью позиционирования или отработки заданной траектории. Большинство промышленных роботов в мире имеют среднюю точность. В электронной промышленности используются роботы с точностью до единиц микрометров. Погрешность манипулирования роботов для транспортных работ превышает 1 мм.
Наряду с классификационными подразделениями промышленные роботы характеризуются параметрами, оценивающими их технический уровень (удельную грузоподъемность, выходную мощность манипулятора, управляемость и т. п.). Эти показатели служат для оценки качества конструкции робота и предназначены для оптимизации параметров при проектировании и экономической оценке роботов,
Компоновочные схемы и целевые механизмы промышленных роботов. В состав промышленного робота входят один или несколько механических манипуляторов, которые состоят яз нескольких кинематических пар с поступательным или угловым перемещением. На манипуляторе устанавливается рабочий орган в виде захватного устройства (охвата) или специального инструмент (пульверизатор, сварочная головка и т. п.). Манипулятор и захватное устройство снабжаются силовыми приводами. Под важные роботы имеют устройство передвижения. Управление движениями манипулятора, захватного устройства и механизма передвижения осуществляется системой автоматического управления с необходимым набором чувствительных элементов.
Компоновочная схема робота УМ-1, предназначенного для выполнения вспомогательных операций при автоматизации технологических процессов в машиностроении, приведена на рис. 5.7.

Рис. 5.7. Компоновочная схема робота УМ-1
Для автономного функционирования в условиях большой неопределенности и изменчивости объекта и внешней среды применяют роботы с интеллектуальным управлением. При интеллектуальном управлении наряду с решением задач по управлению перемещениями манипулятора производится моделирование внешней среды, выполняется логический анализ сложных задании и планируются собственные действия. Интеллектуальные роботы обладают способностью обучаться понятиям и распознавать сигналы и объекты, а также накапливать наиболее удачные программные действия и синтезировать из них новые программы.
В структуре управления выделены два главных уровня управления: стратегический и тактический. На стратегическом уровне решаются задачи по принятию решений и планирование поведения робота, а также задачи распознавания и моделирования среды. На тактическом уровне производится планирование и программирование движений, а также синтезирование алгоритмов адаптивного управления приводами исполнительных механизмов, обеспечивающие фактическое осуществление программного движения.
Заключение
Исторически сложилось, что именно машиностроение составляет основу научно-технического прогресса в различных отраслях народного хозяйства. Непрерывное совершенствование и развитие машиностроительной отрасли неразрывно связано с прогрессом производства технологического оборудования – литейного, кузнечно-прессового, сварочного, металлорежущего. Современный этап деятельности предприятий, выпускающих технологическое оборудование, характеризуется переходом от выпуска отдельных машин к выпуску комплексов машин, обеспечивающих производство разных видов изделий от начала до конца и придания этим комплексам гибкости, т.е. возможности приспособления к разным условиям производства, разным изделиям, разному уровню механизации и автоматизации.
Для технологического оборудования, выпускаемого в настоящее время, характерно быстрое расширение сферы применения программного управления с использованием микропроцессорной техники. Эффективность проектирования и внедрения передовой технологии, комплексной механизации и автоматизации процессов производства технологического оборудования обеспечивается широко развитой специализацией производства на основе стандартизации, унификации и агрегатирования деталей и узлов
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Ансеров Ю.М., Салтыков В.А., Семин В.Г. Машины и оборудование машиностроительных предприятий: Учебник для инженерно-экономических специальностей вузов. – Л.: Политехника, 1991. – 365 с.
2. Зайгеров И.Б. Оборудование литейных цехов. – Минск: Высш. шк., 1980. – 368 с.
3. Ковка и штамповка: Справочник. В 4-х томах/Ред. совет: Е.И.Семенов и др. – М.: Машиностроение, 1985-1987.
4. Сварка в машиностроении: Справочник. В 4-х томах. – М.:Машиностроение, 1978-1979.
5. Колесов И.М. Основы технологии машиностроения. Высш. шк., 1999. – 592 с.