

9. Теорема жуковского
Если силу, приложенную к какой-либо точке звена плоского механизма, перенести параллельно самой себе в одноименную точку повернутого на 90° плана скоростей, то момент этой силы относительно полюса плана скоростей будет пропорционален ее мощности.
На основании общего уравнения динамики - сумма мощностей всех внешних сил, приложенных к n звеньям механизма, и сил инерция звеньев равна нулю:
![]()
По условию теоремы Жуковского, это уравнение равносильно уравнению моментов относительно полюса повернутого плана скоростей (рычага Жуковского)
![]()
Это уравнение можно применять для нахождения величины уравновешивающей силы Fy или уравновешивающего момента My.
Рассмотрим на примере
механизма рис. 10, а. Строим повёрнутый
на 90° план скоростей механизма и переносим
векторы всех внешних сил и сил инерции
звеньев параллельно самим себе в
соответствующие изображающие точки
плана скоростей (рис. 16). Моменты
![]() и
и
![]() представлены в
виде пар сил так, чтобы
представлены в
виде пар сил так, чтобы
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
Определим величину
.
Определим величину
![]() ,
,
приложим силу
![]() в точке е повернутого плана скоростей.
в точке е повернутого плана скоростей.
В формуле
![]() = … м/мм
- масштабный коэффициент
схемы
механизма. Вектор
силы
= … м/мм
- масштабный коэффициент
схемы
механизма. Вектор
силы
![]() ,
величину которой предстоит определить,
приложен в точке b
плана скоростей.
,
величину которой предстоит определить,
приложен в точке b
плана скоростей.
Уравнение моментов сил, действующих на рычаг Жуковского:
![]()
![]()
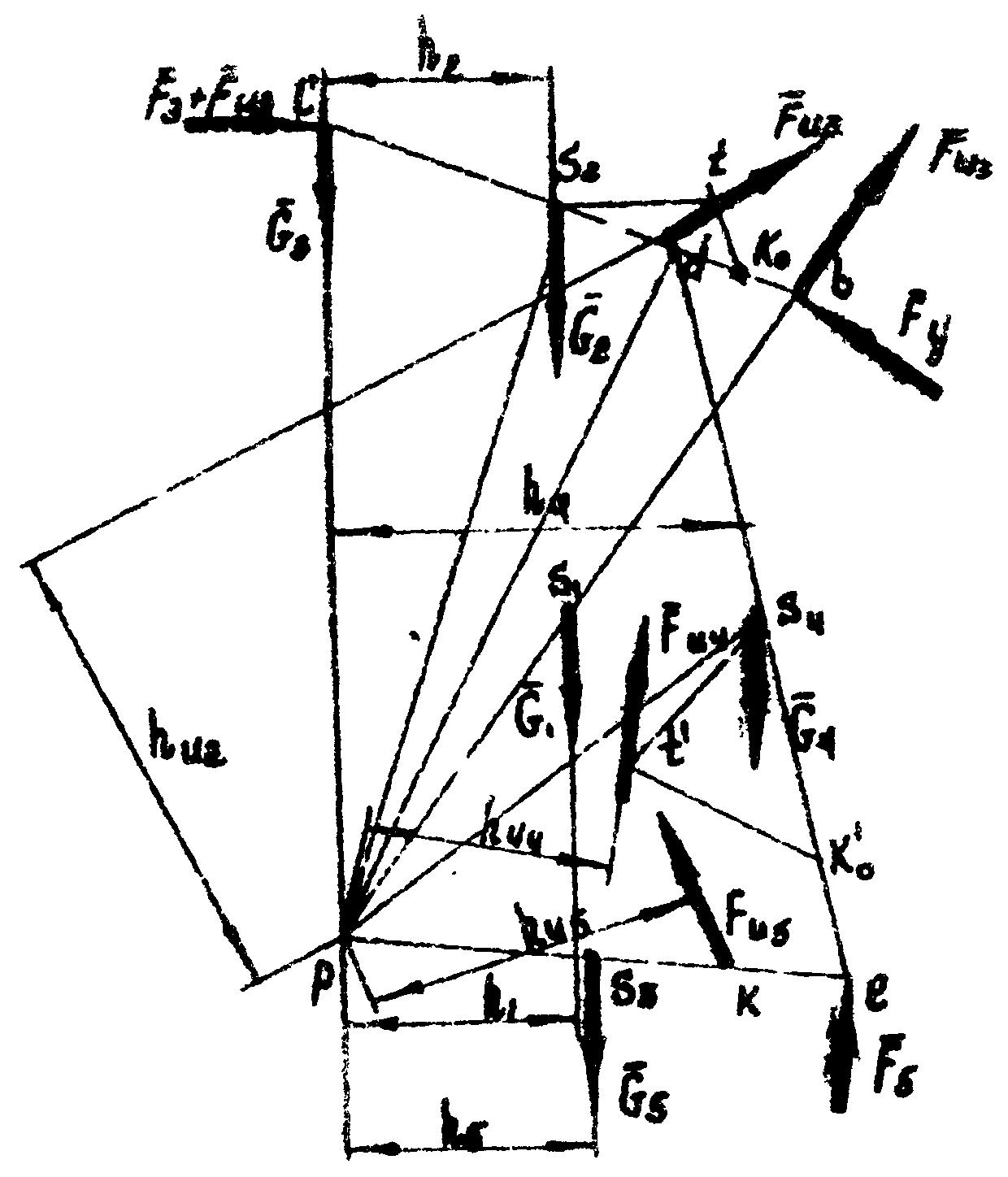
Рис. 16. Рычаг Жуковского
1. Цель и методы определения момента инерции маховика
Целью определения момента инерции маховика является регулирование движения, т.е. обеспечение таких соотношений между силами и массами звеньев, при которых амплитуда колебаний угловой скорости начального звена не выходит за пределы, определяемые коэффициентом неравномерности движения машины.
Исследование осуществляется решением уравнения движения в энергетической форме с предварительным переходом от исходного механизма к динамической модели.
При этом используются как аналитические, так и графические методы, причем последние применяются при упрощении решения и большей его наглядности. При расчете маховика используется кинематический анализ, теории динамики, элементы конструирования и т.п.
2. Исходные данные, выбор динамической модели, кинематический анализ механизма
Для определения момента инерции маховика должны быть заданы или предварительно определены кинематическая схема механизма, положения центров масс, массы и моменты инерции звеньев, законы изменения сил движущих и сил сопротивления, средняя угловая скорость начального звена, коэффициент неравномерности движения машины и другие дополнительные данные, например коэффициенты трения, полезного действия и т.п.
В качестве звена приведения (динамической модели) обычно выбирают входной вал рабочей машины (рис. 1).

Рис. I Динамическая модель механизма:
![]() — приведенный момент
сил движущих;
— приведенный момент
сил движущих;
![]() — приведенный момент
сил сопротивления;
— приведенный момент
сил сопротивления;
Iп — приведенный момент инерции звеньев механизма
В курсовых проектах
рассматриваются
![]() механизмы,
в которых приведенные моменты сил
сопротивления
и
сил движущих
и приведенный момент
инерции Iп
являются функциями
обобщенной координаты — угла поворота
звена приведения φ.
механизмы,
в которых приведенные моменты сил
сопротивления
и
сил движущих
и приведенный момент
инерции Iп
являются функциями
обобщенной координаты — угла поворота
звена приведения φ.
Для определения приведенных моментов сил и приведенных моментов инерции нужно знать отношения скоростей. Эти отношения могут быть получены аналитически, например методом замкнутых векторных контуров [1] или с помощью планов возможных скоростей, построение которых рассмотрено ниже; и в том или в другом случае нужно задавать, если она не задана, угловую скорость звена приведения, считая для простоты ее величину постоянной во всех положениях. После чего по формулам плоского или сложного движения определяются скорости всех требуемых точек механизма.
Рассмотрим в качестве примера механизм высадочного ползуна автомата для высадки головок заклепок и винтов (рис. 2).
Кривошип 1 получает движение от электродвигателя через зубчатые механизмы и передает его на шатун 2, и далее — рабочее звено — ползун 3.
Определение скоростей
начинаем со скорости точки В:
![]() lAB;
lAB;
![]() .
Далее переходим к
скорости точки С
.
Далее переходим к
скорости точки С
![]()
Выбираем масштабный
коэффициент плана скоростей
![]() ;
тогда отрезок, изображающий
;
тогда отрезок, изображающий
![]() на плане,
на плане,
![]() .
.
Строим план скоростей (рис. 2,б). Скорости центров масс звеньев S1 и S2 определены с использованием свойства подобия плана скоростей и звеньев 1 и 2:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.

Рис. 2. Кинематическая схема механизма высадочного ползуна: 1 - кривошип, 2 - шатун, 3 - ползун