

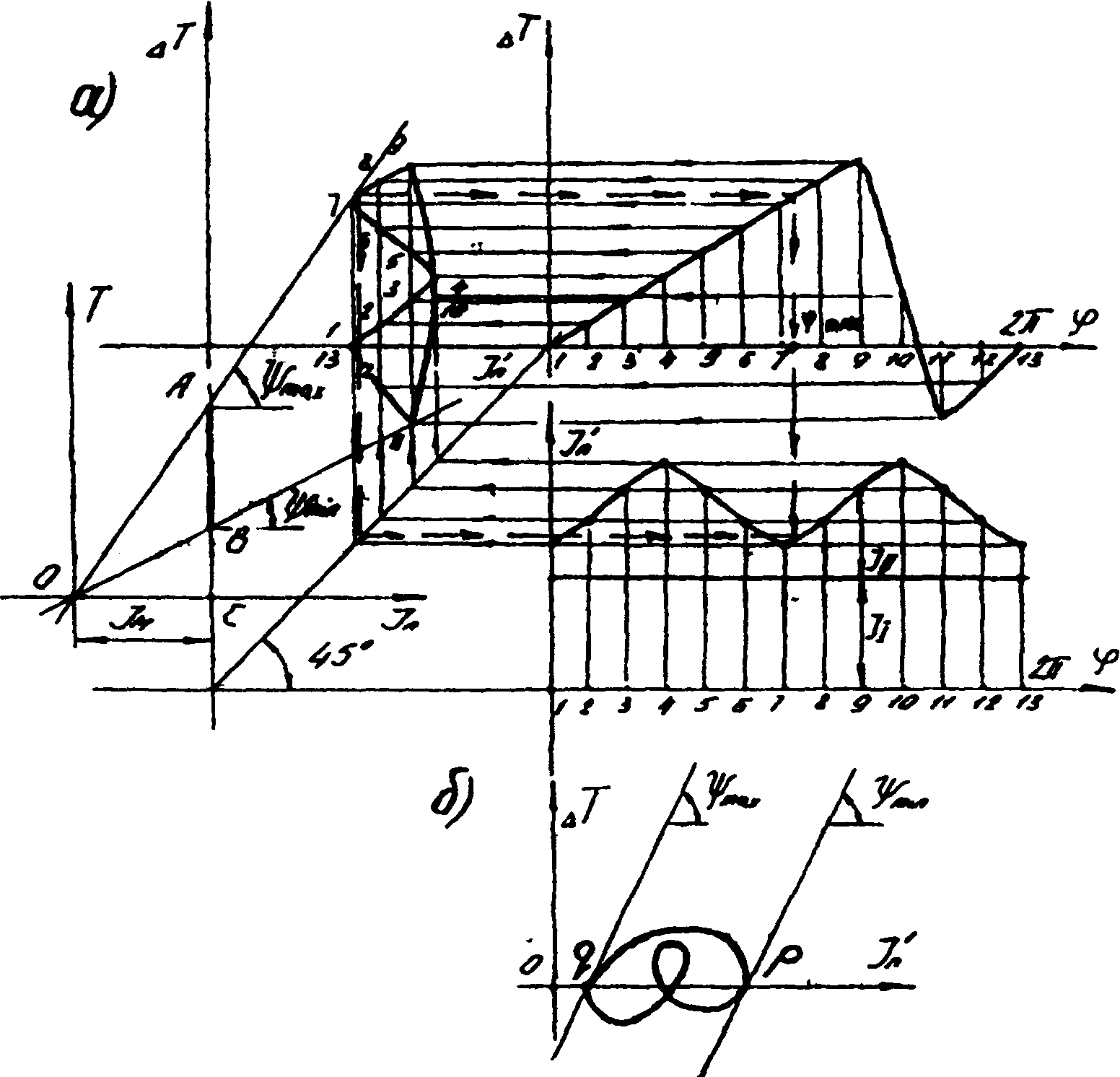
4. Построение графика энергомасс
Из графиков ΔΤ(φ) и Ιп(φ) исключаем угол φ строим график энергомасс ΔΤ(Ιп) (рис.4).
Искомые точки для построения графика находят на пересечении соответствующих линий со стрелками (рис. 4, а). Кривая получается последовательным соединением точек. Она может иметь самый разный вид, но всегда должна быть замкнута за цикл установившегося движения.
По формулам
![]() и
и
![]()
![]()
определяем углы
![]() и
и
![]() ,
под которыми проводят касательные к
кривой энергомасс, пересекающиеся в
точке О — начале новой системы координат
IпОТ.
Момент инерции маховика
1м
= μ1(
,
под которыми проводят касательные к
кривой энергомасс, пересекающиеся в
точке О — начале новой системы координат
IпОТ.
Момент инерции маховика
1м
= μ1(![]() ).
Однако часто точка О
уходит за пределы чертежа, тогда момент
инерции
).
Однако часто точка О
уходит за пределы чертежа, тогда момент
инерции
![]()
При больших значениях
и
касательные не
пересекают ось ΔΤ
на чертеже, и в этом случае для определения
![]() используют следующую
зависимость:
используют следующую
зависимость:
![]() ,
,
где
![]() и
и
![]() — на рис. 4, б.
— на рис. 4, б.
![]() =…Дж/мм
=…Дж/мм
![]() =…рад/мм
=…рад/мм
![]() =…кг*м2/мм
=…кг*м2/мм
Рис. 4. График энергомасс (диаграмма Ф.Виттенбаура)
5. Определение размеров маховика
Маховик - колесо с массивным ободом, и его момент инерции с достаточной точностью можно выразить по формуле
![]()
Здесь m — масса обода маховика, кг; D - диаметр, м, определяющий положение центра масс обода (рис. 5). Подставив в формулу (1), получаем:
![]() (2)
(2)
mD2 - называется маховым моментом, или характеристикой маховика.
Развертка обода (рис. 5)
позволяет определить массу обода
маховика
![]() ,
,
где
![]() —
плотность материала обода;
—
плотность материала обода;
=7800 кг/м3 — плотность стали;
=7100 кг/м3 — плотность чугуна.
Рекомендуемые отношения
![]() ...0,45;
...0,45;
![]() 0,25...0,35.
0,25...0,35.
Тогда m
=
![]() ,
(3)
,
(3)
Подставив в выражение (2) и
преобразовав относительно D
получим:
 (4)
(4)
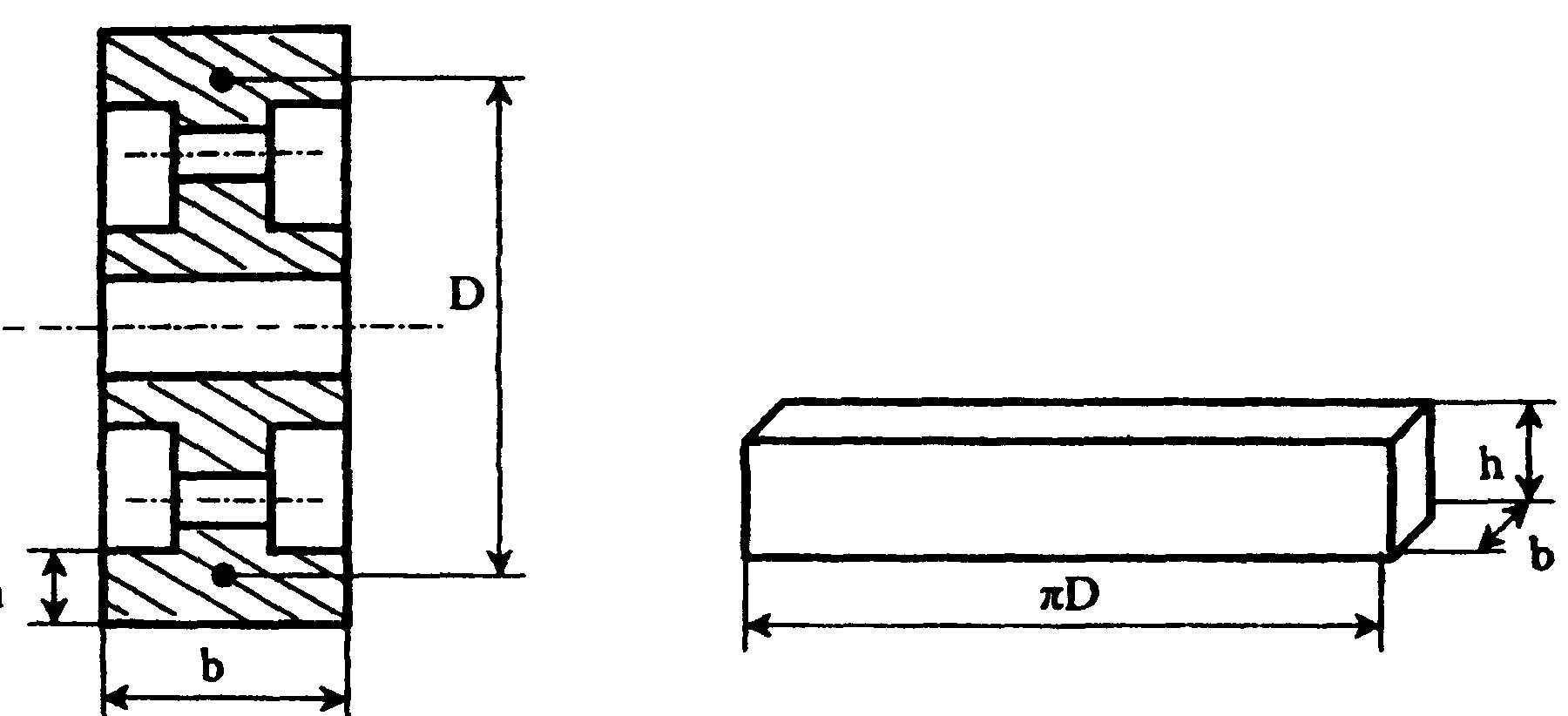
Рис. 5. Эскиз маховика
Получив D в метрах по формуле (3) определяют массу обода m. Масса маховика тм = 1,3m. Здесь коэффициент 1,3 учитывает массу ступицы и спиц, размеры которых выбирают конструктивно.
При больших значениях D и т маховик лучше пересчитать и установить на более быстроходный, например вал двигателя. Момент инерции маховика пересчитывают из условия равенства кинетических энергий
![]()
Откуда
 .
.
Диаметр на новом валу
 (5)
(5)
1. Цель синтеза планетарных зубчатых механизмов
При синтезе планетарных зубчатых механизмов выбирается тип редуктора, определяются числа зубьев колес, при которых обеспечивается ряд условий синтеза, производится расчет их радиусов и построение схемы редуктора.
2. Основные понятия и определения
Зубчатые механизмы с движущимися геометрическими осями некоторых колес называются планетарными зубчатыми механизмами. Колеса с подвижными осями называются сателлитами, подвижное звено, в котором помещены оси сателлитов, - водилом; вращающиеся вокруг неподвижных осей колеса, по которым обкатываются сателлиты называются центральными, или солнечными; неподвижное центральное колесо называется опорным (рис. I). Планетарные механизмы подразделяются на планетарные редукторы, которые обладают одной степенью подвижности (V = I) и обязательно имеют опорное звено, и дифференциальные механизмы, для которых W > I (рис. 2).
Передаточное отношение для планетарного редуктора - постоянная величина, для дифференциального механизма - переменная.
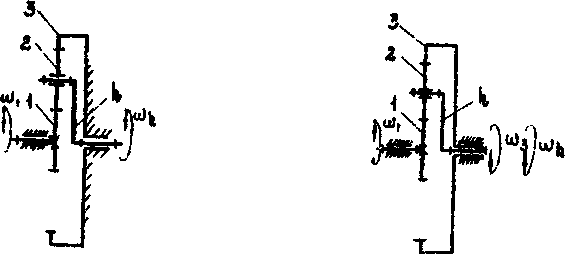
Рис. I. Схема планетарного редуктора
1 - центральное или солнечное колесо;
2 - сателлит;
3 - опорное колесо;
4 – водило.
Рис 2. Схема дифференциального механизма
1 - солнечное колесо;
2 – сателлит;
3 - центральное колесо;
4 – водило.
Как видно из рисунков, планетарный редуктор можно превратить в дифференциал, если освободить опорное колесо и сообщить ему вращение.
У планетарных механизмов имеется обычно несколько симметрично расположенных сателлитов. Их вводят с целью сокращения общих габаритов механизма (снижается усилие в зацеплении), разгрузки подшипников центральных колес, улучшения уравновешивания водила.
Планетарные зубчатые редукторы получили широкое распространение благодаря компактности и малому весу по сравнению с рядовыми передачами.
На рис. 3а,б приведены типовые схемы планетарных редукторов (названия звеньев такие же, как и на рис.1).
Важнейшей кинематической
характеристикой планетарного редуктора
является передаточное отношение от
первого колеса к водилу h
при опорном третьем колесе
![]() , которое определяется
по формуле Виллиса
, которое определяется
по формуле Виллиса
![]() (1)
(1)
где - передаточное отношение так называемого преобразованного механизма, представляющего рядовую зубчатую передачу, полученную сообщением всем звеньям рассматриваемого планетарного редуктора угловой скорости ωh, т.е. путем применения метода обращения движения.
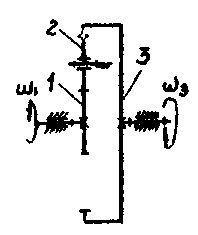
На рис. 4 показана схема преобразованного механизма для редуктора типа А .
![]()
 выражается через числа
зубьев механизмов и
формула (1) принимает вид
выражается через числа
зубьев механизмов и
формула (1) принимает вид
1) для сх. А
![]() ,
,
![]() ,
,
2) для сх. B
![]() (2)
(2)
3) для
сх. С
![]()
Рис. 4. Схема прообразованного механизма: 1 и 3 – центральные колёса; 2 – промежуточное колесо.
Все схемы А, В, С, С’ можно подразделить на две группы:
1) редукторы с
![]() >0
(сх. С, С’);
>0
(сх. С, С’);
2) с <0 (сх.А и В).
Механизмы 1-ой группы, как правило, работают в качестве понижающих частоту вращения передач при входном звене - водиле; они позволяют получить большое передаточное отношение ( , для сх. С’ до 10000), но при этом имеют низкий коэффициент полезного действия. Обычно такие механизмы используют в несиловых передачех. В силовых передачах их применяют при сравнительно небольших значениях (до 30..100). Схема С' предпочтительней, чем сх. С.
Механизмы 2-ой группы имеют широкое применение в силовых передачах. Передаточное отношение - 1,1...14. К.п.д. η = 0,96...0,98. Для сх. А наилучший диапазон изменения = 3...8.