

4. Синтез кулисного механизма
Кривошипно-кулисный механизм используют для преобразования вращательного движения кривошипа 1 в качательное или вращательное движение подвижной направляющей - кулисы 3, по которой перемещается камень 2 (рис. 10). Условие проворачиваемости кулисы состоит в том, что длина стойки а должна быть меньше длины кривошипа r.
Задача 8.
Дано: r, ход ползуна Н, λ=с/b и коэффициент изменения скорости Κν.
Определить: а, b,с (рис. 10).
Коэффициент Kν = φp/φx (1)
φp
+ φx
= 360º; отсюда получают
![]() и определяют
и определяют
![]() .
Размеры b и с определяются
таким образом: b=H/2,
c=λ·b.
.
Размеры b и с определяются
таким образом: b=H/2,
c=λ·b.
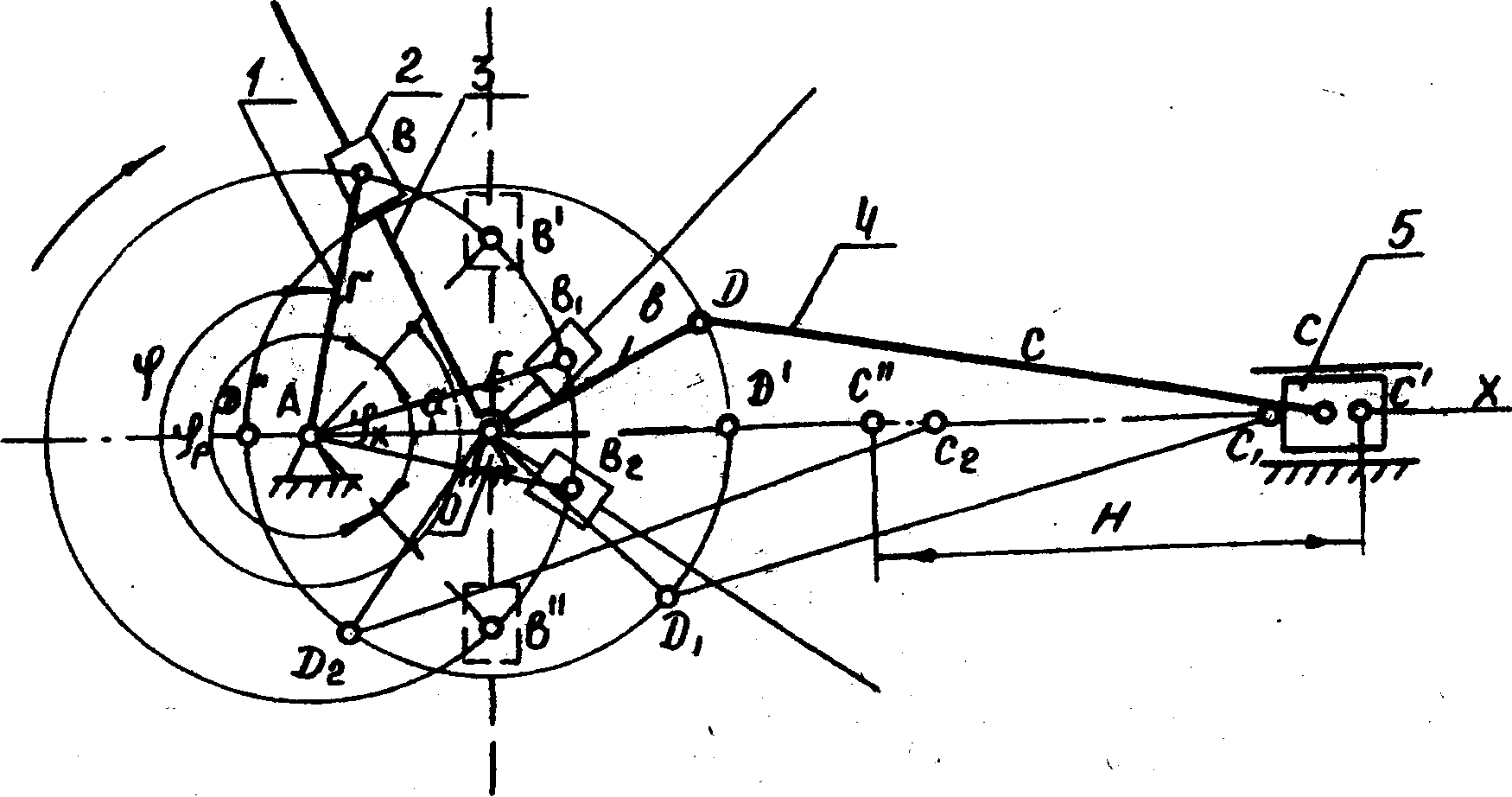
Рис. 10. Определение размеров звеньев кулисного механизма с вращающейся кулисой
Порядок построения схемы механизма
Выбирают направление Ах, на котором откладывают отрезок АЕ=а; из точек А и Ε строят окружности соответственно радиусов r и b; делят окружность радиуса r на n равных частей в направлении вращения кривошипа АВ (обычно n=12); за начало отсчета удобно принять начало холостого хода В', в ряде случаев - начало рабочего хода В"; из полученных точек Β',Β1,Β2...Β"...Β' начиная строят звено 3 в этих положениях и тем самым определяют положение точки D: D', D1, D2...D"...D'; радиусом DC=c делают засечки на прямой Ах, получая точки С', C1, С2...С"...С'. Соединяя точки Di с Сi, одинаковых индексов i, получают кинематические схемы механизма в n положениях.
Задача9.
Дано: расстояние d=AD между опорами кривошипа и кулисы, ход штанги 5 - Н, λ=EC/DC, коэффициент изменения средней скорости Κν. Определить: r, b, с, рис. 11.
По формуле (2) определяют величину угла
Θ, находят длину кулисы
![]() .
Отложив AD=d
и проведя крайние положения кулисы DC"
и DC' из прямоугольного
треугольника ADB', определяют
r = d·sin(0,5
Θ). Ось штанги 5 х-х
определяется размером h/2,
где h=b(l-cos
0,5Θ) - высота стрелы
сегмента С'С". Длина звена ЕС=с
определяется из условия с=λ·b.
Для варианта на рис. 11,а штанга
располагается несколько выше дуги
С'С".
.
Отложив AD=d
и проведя крайние положения кулисы DC"
и DC' из прямоугольного
треугольника ADB', определяют
r = d·sin(0,5
Θ). Ось штанги 5 х-х
определяется размером h/2,
где h=b(l-cos
0,5Θ) - высота стрелы
сегмента С'С". Длина звена ЕС=с
определяется из условия с=λ·b.
Для варианта на рис. 11,а штанга
располагается несколько выше дуги
С'С".
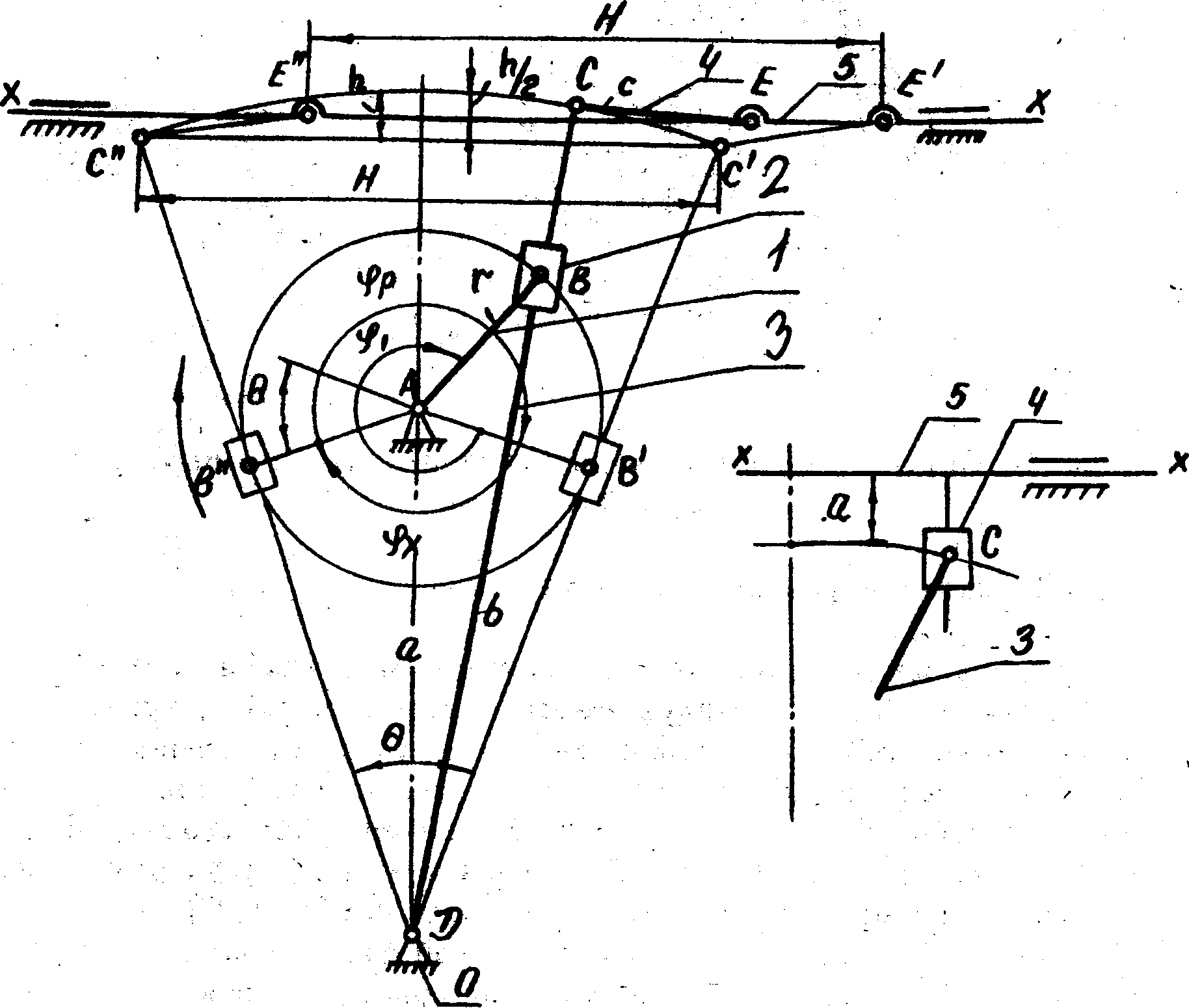
Рис. 11. Определение размеров кулисного механизма с качающейся кулисой
Рис. 11,а. Вариант соединения кулисы 3 со штангой 5 через камень 4
Обычно размер а, определяющий направление х-х, выбирают конструктивно: а=50...80 мм.
Задача 10.
Дано: а, φmax, υдоп.
Определить b, d и положение оси С качания цилиндра (рис. 12).
Такого типа коромыслово-кулисные механизмы применяются в гидро- или пневмодвигателях с качающимся цилиндром. Длина рабочей части штока 2 определяется величиной хорды В'В": b=(1,1...1,2)·В'В"; длина цилиндра 3 d=kb, где к=1,2...1,3 -коэффициент, учитывающий конструктивные размеры цилиндра.
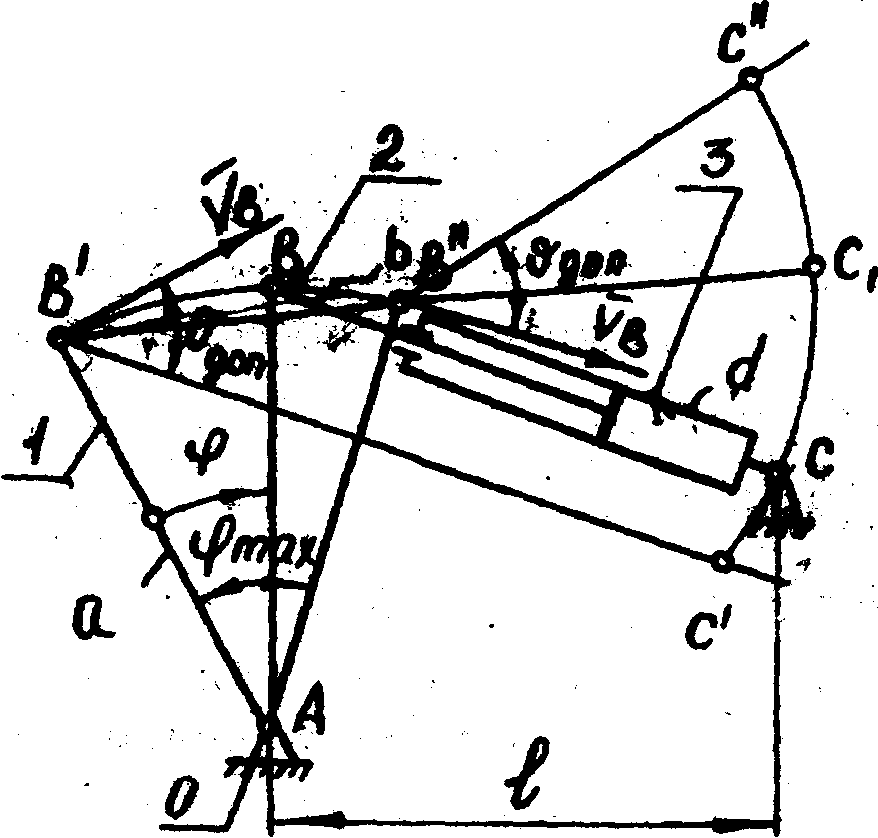

Рис. 12. Определение размеров коромыслово-кулисного механизма
Рис. 13. Синтез схемы механизма при разбивке хода штока S
Положение точки С можно выбрать в любом месте на луге С"С', радиус которой В"С"≥d, а ограничивающие лучи В'С' и В"С" проведены из точек В'В" под углами υдоп.
Если точку С1 выбрать на продолжении прямой В'В", то изменения угла давления о между крайними положениями АВ' и АВ" коромысла будут незначительными.
Примечание. В ряде случаев положение точки С задается расстоянием l, но все равно она должна располагаться между прямыми В'С' и В"С".
После определения размеров звеньев порядок построения схемы механизма в положении, определяемом углом φ, следующий: строят звено АВ в этом положении, соединяют точку В с С и отмечают длину штока b; начиная с точки С, строят цилиндр. Для построения n положений разбивают на это число угол φmax и производят для каждого из них построение схемы механизма. Число n определяется величиной угла φmax и может быть равно 6...10.
В тех случаях, когда на равные части нужно разделить ход штока S, поступают так (рис.13): соединяют точки В', В, В" с С, причем положение АВ взято при угле 0,5φmax. На В"С откладывают В"D1"=b, длину Штока. Радиусом CD1" переносят точку D1" на направление ВС, получают точку D". На ВС откладывают отрезок D"D'=S - ходу штока, который делят на n равных частей; из полученных точек D1…Di длиной штока b, как радиусом делают засечки на дуге В'В" и получают точки B1…Bi, которые соединяют с точкой С. Откладывая от точек В', B1…Bi...В" на полученных "своих", направлениях длину штока b, тем самым и определяют его положения. Такое построение схемы механизма за малостью угла B'CB" вносит несущественные, допустимые погрешности, но значительно упрощает синтез.