6.2. Группы II класса 3 и 5 видов
Определим реакции в парах
поперечно-строгального станка, считая,
что внешние силы, приложенные к звеньям
(силы тяжести G,
силе производственного сопротивления
![]() ),
заданы, а силы инерции подсчитаны (рис.
11, а).
),
заданы, а силы инерции подсчитаны (рис.
11, а).
Расчленяем механизм на структурные группы: группа 4, 5; группа 2, 3 и входное звено - кривошип 1 со стойкой 0.
Силовое исследование выполняем сначала для более удаленной от входного звена группы 4, 5, для чего эту группу освобождаем от связей и вместо них прикладываем к элементам освобожденных пар неизвестные реакции (рис. 11, б). Эта группа 5 вида. Порядок расчета. Составляем векторное уравнение равновесия отдельно для звена 5.

строим согласно этому
уравнению план сил, из которого определяем
неизвестные реакции
и
![]() ;
направлены эти реакции соответственно
;
направлены эти реакции соответственно
![]() ,
,
![]() .
Построение плана сил: от произвольной
точки a
откладываем последовательно друг за
другом известные векторы сил
,
.
Построение плана сил: от произвольной
точки a
откладываем последовательно друг за
другом известные векторы сил
,
![]() ,
,
![]() .
Из начала
проводим линию, параллельную
,
а из конца
- параллельную
до их взаимного пересечения
в точке b,
замыкаем план сил и определяем
величины неизвестных реакций. Масштабный
коэффициент плана сил µр
=… Н/мм. Составляем векторное уравнение
равновесия для звена 4
.
Из начала
проводим линию, параллельную
,
а из конца
- параллельную
до их взаимного пересечения
в точке b,
замыкаем план сил и определяем
величины неизвестных реакций. Масштабный
коэффициент плана сил µр
=… Н/мм. Составляем векторное уравнение
равновесия для звена 4

строим согласно
этому уравнению план
сил, замыкая который
определяем
![]() .
.
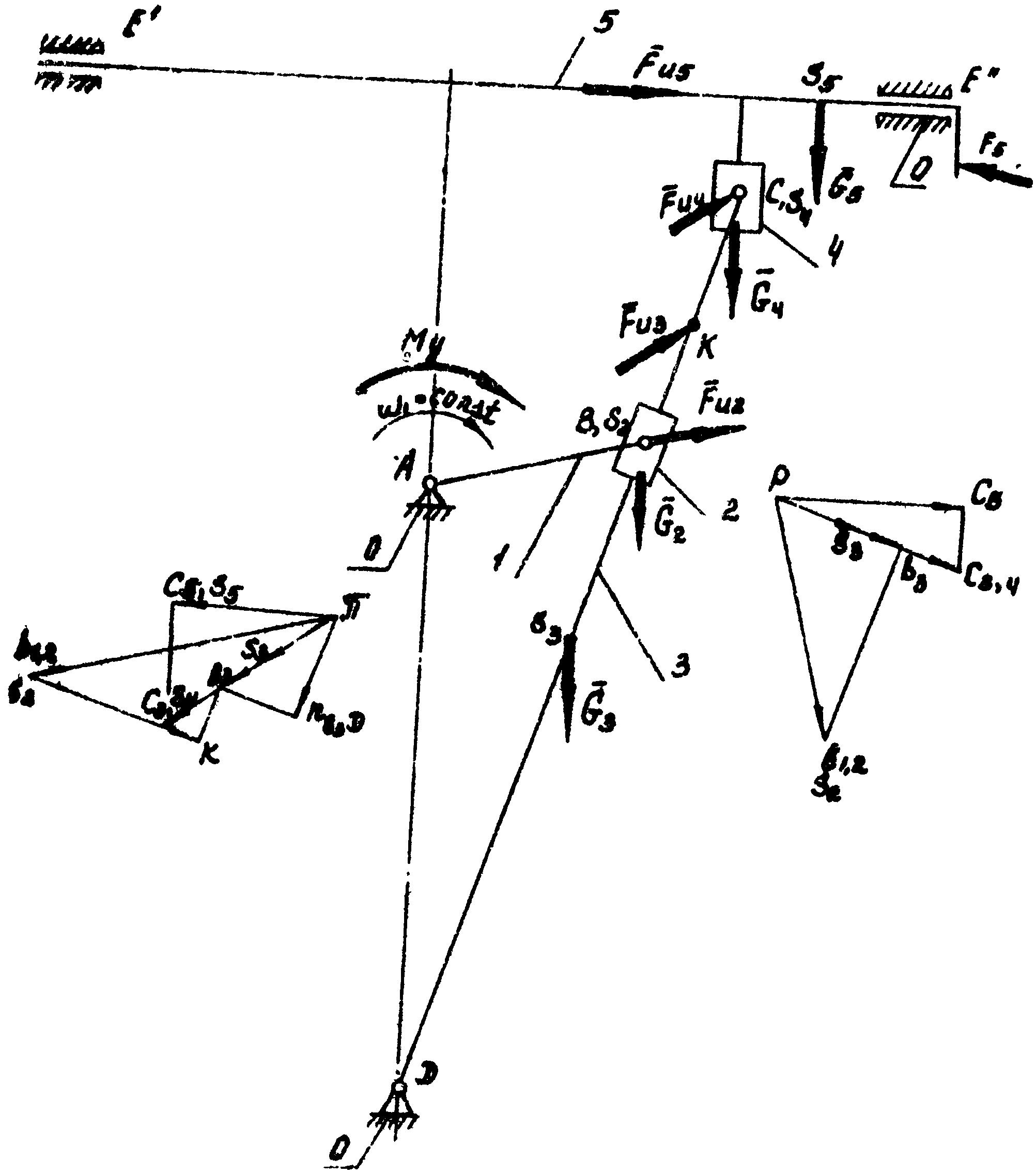
Рис. 11.а. Схема механизма
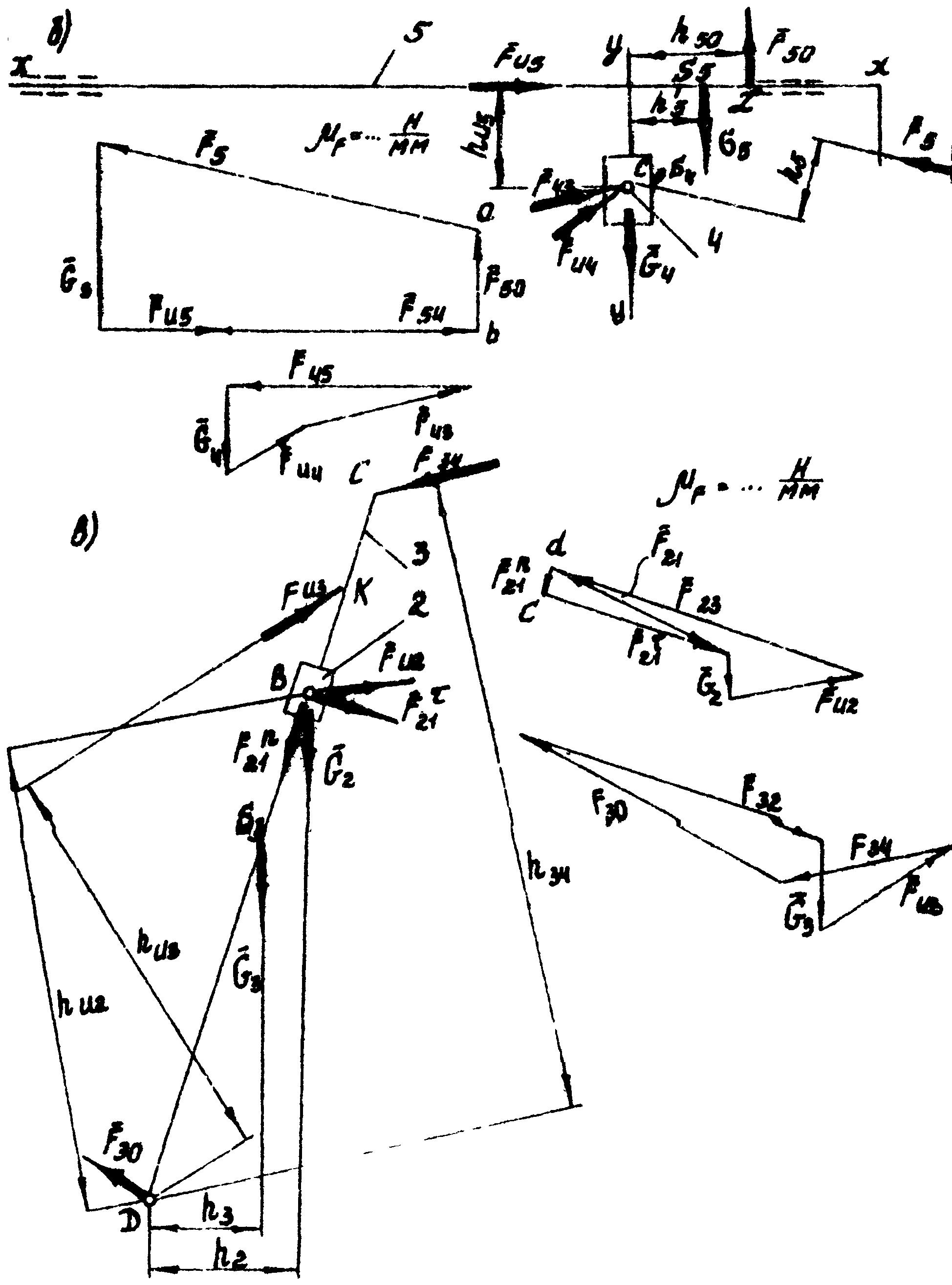
Рис. 11.б,в: б) группа 4,5, II класса, 5 вида; в) группа II класса, 3 вида
Для определения точки z
приложения реакции
![]() составляем уравнение
моментов всех сил,
действующих на группу, относительно
точки С:
составляем уравнение
моментов всех сил,
действующих на группу, относительно
точки С:
![]() .
.
Отсюда определяем
![]()
Для определения положения
точки N
приложения реакции
составляем уравнение
моментов всех сил, действующих на звено
4, относительно той же точки С. В
рассматриваемом примере точка N
совпадает с точкой
С, т.к. линии действия сил, приложенных
к звену 4 (![]() )
проходят через точку С.
)
проходят через точку С.
Переходим к рассмотрению
группы 2, 3, третьего вида, освободив её
от связей и вместо них к элементам
освобожденных пар приложив неизвестные
реакции
(![]() ,
,![]() ),
а со стороны исследованной группы 4, 5 в
шарнире С - yже
известную реакцию
),
а со стороны исследованной группы 4, 5 в
шарнире С - yже
известную реакцию
![]() (рис. 11,в). Составляем уравнение моментов
сил действующих на группу 2, 3, относительно
точки D:
(рис. 11,в). Составляем уравнение моментов
сил действующих на группу 2, 3, относительно
точки D:
![]()
Откуда определяем
![]()
Составляем векторное уравнение равновесия для звена
решаем его построением
плана сил, откладывая от произвольной
точки С последовательно
![]() ,
,
![]() ,
,
![]() .
Из начала
проводим линию, параллельную
,
а из конца
- параллельную
.
Из начала
проводим линию, параллельную
,
а из конца
- параллельную
![]() до их взаимного пересечения
в точке d.
Далее,
до их взаимного пересечения
в точке d.
Далее,
![]() .
.
По векторному уравнению равновесия сил для звена 3
строим план сил и находим .
Реакция
![]() (или
)
будет проходить через некоторую
точку Р, положение которой определится
из уравнения моментов сил звена 3
относительно точки Д
(или
)
будет проходить через некоторую
точку Р, положение которой определится
из уравнения моментов сил звена 3
относительно точки Д
![]() ,
,
отсюда
![]() .
.
В нашем случае точка Ρ совпадает с B, т.к. все силы, действующие на звено 2, сходятся в точке В.
Из рассмотренных примеров видно, что для групп Ассура II класса различных видов разработаны специальные методы их силового исследования. В целях наглядного представления этих методов применительно к силовым расчетам групп различных видов предлагается табл.1.
Примечание. Примеp расчета с группой II класса 4 вида в пособии не приводится, так как эта группа в проекцияx встречается редко. При необходимости такового смотри табл.1.
Силовой расчёт групп Ассура
Схемы групп |
Порядок расчета |
|
Группа 1 вида
|
Заменить реакцию
составляющими
Заменить реакцию
|
|
Составить |
Определить |
|
1)
2)
3)
4)
|
|
|
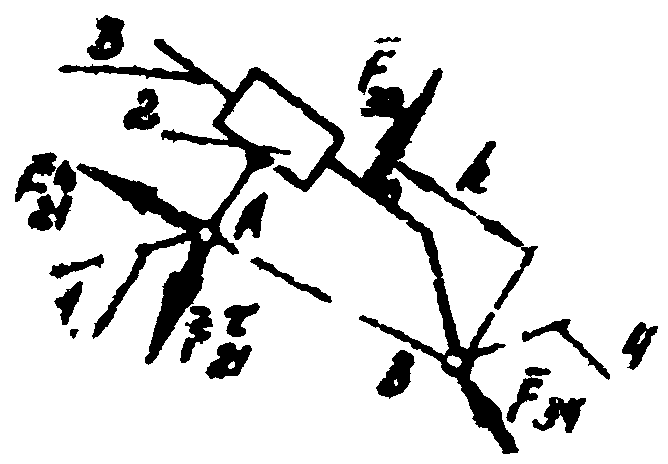
Группа 2 вида
|
Заменить реакцию составляющими и . |
|
Составить |
Определить |
|
1) для звена 2 2) для группы 2, 3
3)
4) для звена 3 |
|
|
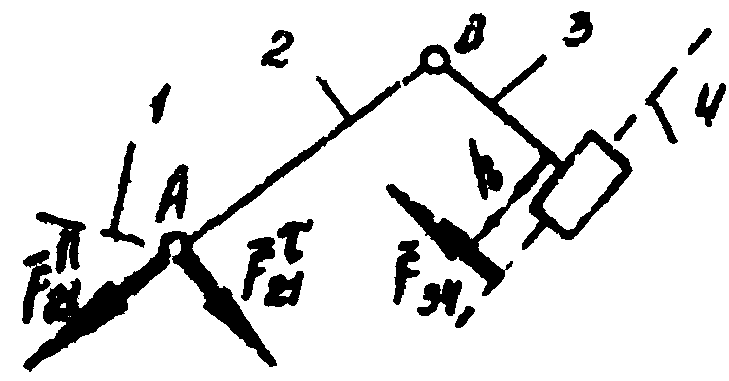
Группа 3 вида
|
Заменить реакцию составляющими и . |
|
Составить |
Определить |
|
1)
2) для звена 2 3) для звена 3 4) для звена 3 |
|
|
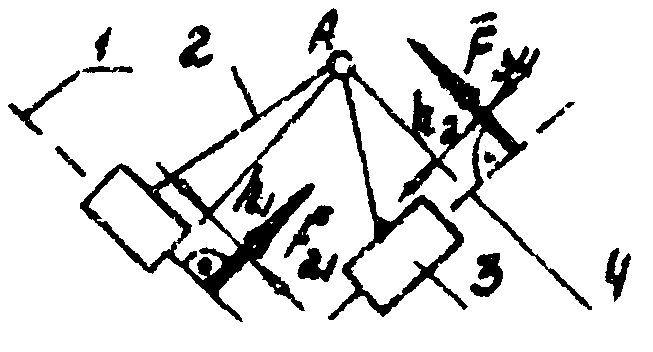
Группа 4 вида
|
Составить |
Определить |
1) для группы 2, 3 2) для звена 2
3)
4)
|
|
|
Группа 5 вида
|
Составить |
Определить |
1) для звена 3 2) для звена 2 3) для звена 2
4)
|
|
|