

5. Условия кинетостатической определимости кинематических цепей
Paccмотрим вопрос об определении реакций в различных кинематических парах механизмов, считая, что трение в них отсутствует.
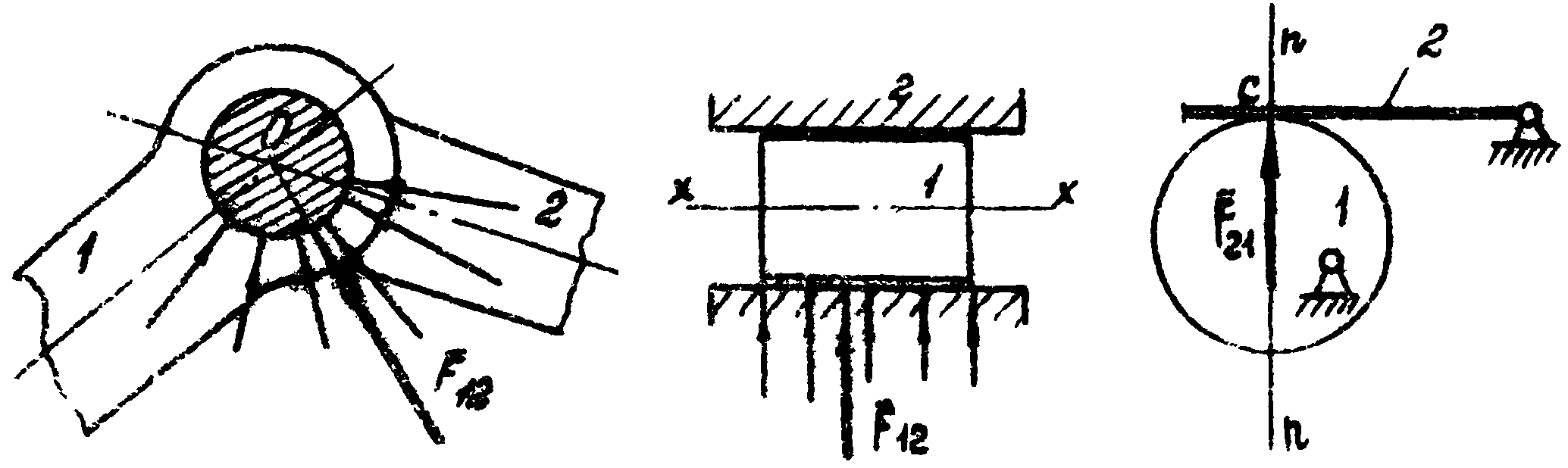
Рис. 7
Рис.
8
Рис. 9
Во вращательной паре V
класса (рис. 7) результирующая сила
реакции
![]() проходит через центр
0 шарнира. Величина и направление этой
реакции не известны.
проходит через центр
0 шарнира. Величина и направление этой
реакции не известны.
В поступательной паре V класса (рис. 8) реакция перпендикулярна к оси движения Х-Х. т.е. она известна по направлению, но не известна по точке приложения и величине.
В паре IV
класса (рис. 9) реакция
![]() ,
приложена в точке С соприкосновения и
направлена по общей
нормали n-n,
проведенной в
точке С, т.е.
известны ее
направление и
точка приложения и
не известна
величина.
,
приложена в точке С соприкосновения и
направлена по общей
нормали n-n,
проведенной в
точке С, т.е.
известны ее
направление и
точка приложения и
не известна
величина.
Таким образом, для определения реакций в каждой из низших пар (V класса) необходимо найти две неизвестные величины, а для определения реакций высшей паре (IV класса) - только одну. Обозначим число подвижных звеньев кинематической цепи через n, число пар V класса - через p5, а число пар IV класса - через p4. Так как для каждого звена, совершающего плоское движение, можно написать три уравнения равновесия, то общее число уравнений при n звеньях будет равно 3n. Число неизвестных, которое необходимо определить для пар У класса равно 2p5, а для пар 1V класса p4, и условие кинетостатической определимости кинематической цепи может быть записано
3n = 2p5 + p4 (4)
Любой механизм с парами 1V класса может быть заменен механизмом с парами V класса. Тогда очевидно, достаточно ограничиться рассмотрением цепей, звенья которых входят только в пары V класса. Уравнение (4) может быть переписано так
3n = 2p5
откуда n = 2/3 p5
Числа звеньев и пар связаны между собой соотношением
n = 2, 4, 6, 8, …
p5 = 3, 6, 9, 12, …
Но эти сочетания звеньев и пар представляют группы Ассура, следовательно, последние является кинетостатически определимыми цепями. Поэтому рациональным является определение реакций в кинематических парах из равновесия отдельных групп.
6. Определение реакций в кинематических парах
6.1. Группы 2 класса 1 и 2 видов
Рассмотрим на примере шестизвенного механизма (рис. 10). Будем считать, что внешние силы, приложенные к звеньям (силы тяжести G, сила производственного сопротивления F3 и момент М5)· заданы, а силы инерции определены, так как известны массы и моменты инерции звеньев и построен план ускорений.
При силовом исследовании механизм расчленяется на группы Ассура и выделяется входное звено со стойкой. При этом действие отсоединенных при расчленении механизма звеньев заменяется реакциями, которые для каждой группы определяется при помощи уравнений кинетостатики аналитически или построением плана сил.
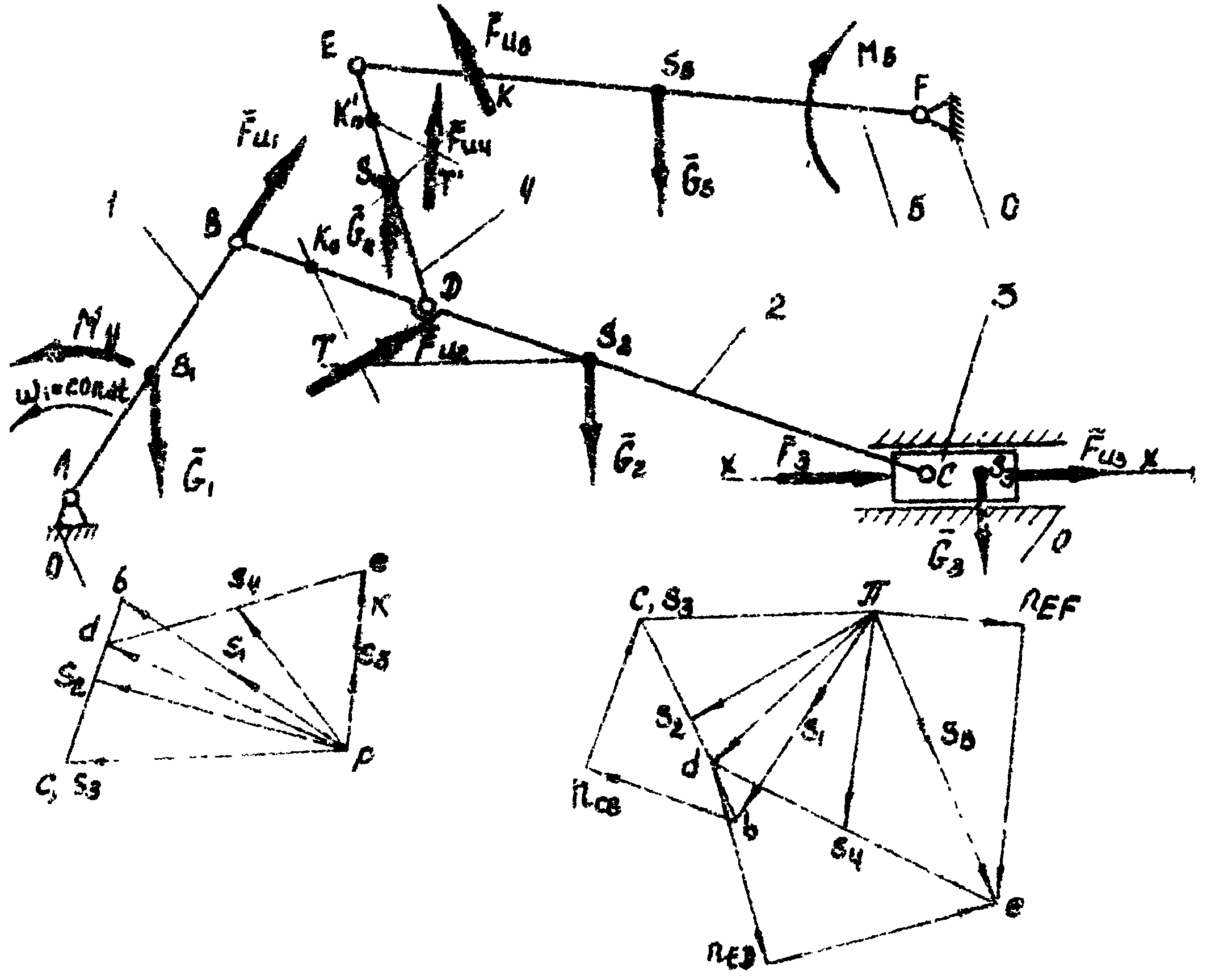
Рис. 10а. Схема
механизма
Силовой расчет начинается с группы, которая в процессе образования механизма присоединена последней, и заканчивается расчетом входного звена. Рассматриваемый механизм состоит из стойки О, входного звена 1, группы 2, 3 и группы 4, 5.
Силовое исследование
выполняем сначала для группы 4, 5, для
чего группу освобождаем от связей и
вместо них прикладываем к элементам
кинематических пар D
и F
реакций
![]() и
и
![]() .
.
Примечание.
Условимся реакцию на звено a
со стороны эвена b
обозначать
![]() ,
По третьему закону
механики
,
По третьему закону
механики
![]() .
.
Рассматриваемая группа II
класса, 1 вида. Порядок расчета группы
этого вида следующий. Каждую из реакций
и
раскладываем на две составляющие, одну,
нормальную, по оси звена (![]() и
и
![]() )
и вторую, тангенциальную, под прямым
углом к оси звена (
)
и вторую, тангенциальную, под прямым
углом к оси звена (![]() и
и
![]() )
(рис. 10, б). Составляем уравнение равновесия
для звена 5 в виде уравнения моментов
сил относительно точки Е, при этом
неизвестная составляющая реакции
исключается.
)
(рис. 10, б). Составляем уравнение равновесия
для звена 5 в виде уравнения моментов
сил относительно точки Е, при этом
неизвестная составляющая реакции
исключается.
![]()
Откуда
![]()
Если
![]() окажется отрицательной, то это значит,
что направление противоположно тому,
которое было предварительно принято.
окажется отрицательной, то это значит,
что направление противоположно тому,
которое было предварительно принято.
Составляем уравнение равновесия для звена 4, при этом исключается.

Составляем векторное уравнение равновесия для группы 4, 5.

Рис. 10.б,в:
б) группа 4,5
II
класса, 1 вида
в) группа 2,3
II класса,
2 вида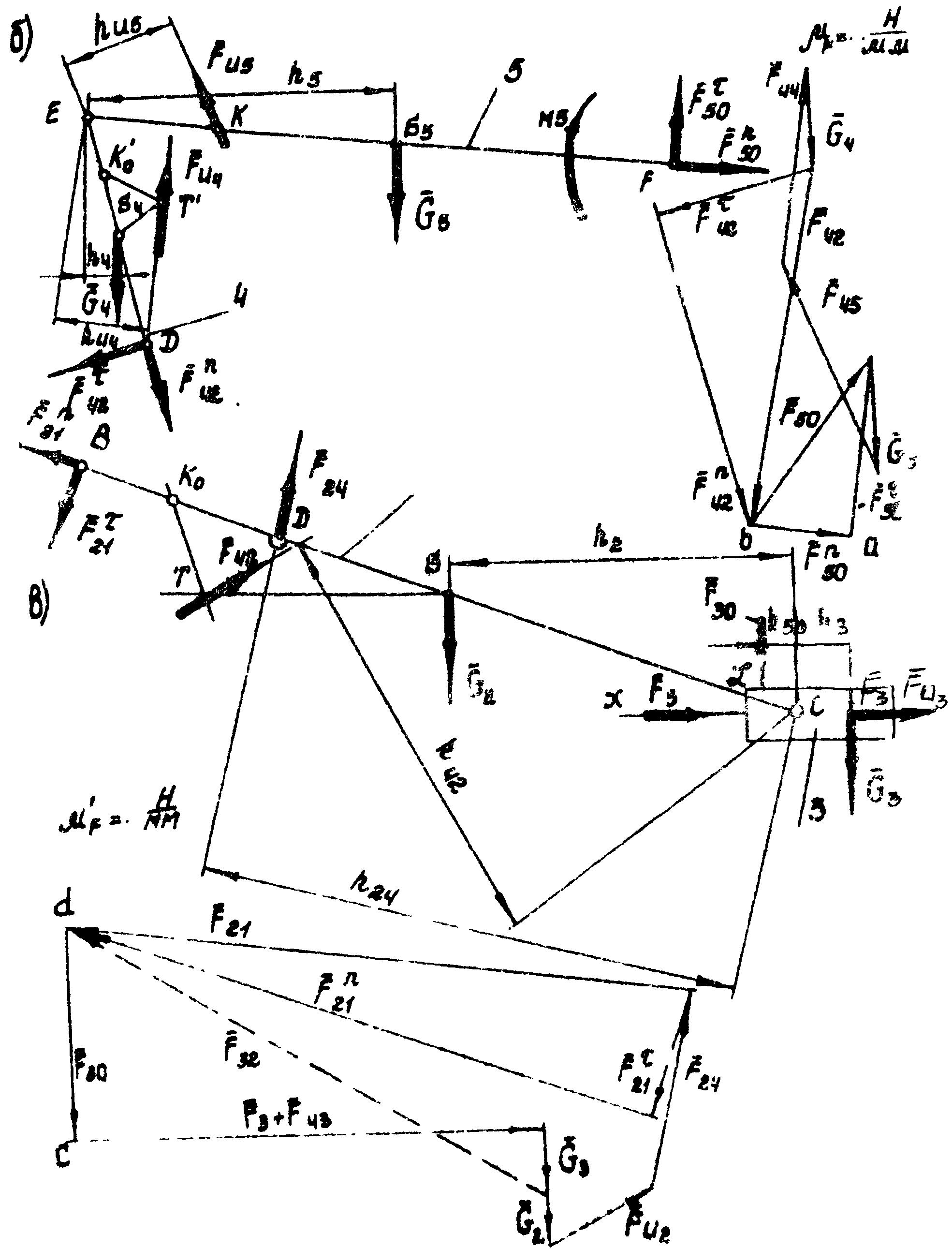
Исходя из уравнения строим
план сил для группы 4, 5 (рис, 10, б) в
следующей последовательности: начиная
от произвольной точки a
откладываем известные по величине и
направлению векторы сил
![]() .
Из конца вектора проводим прямую,
параллельную
,
а из начала
прямую, параллельную
.
В точке b
пересечения этих пряных замыкается
силовой многоугольник и определяются
реакции
и
.
Масштабный коэффициент плана сил µF
выбирается произвольно и имеет размерность
Н/мм.
.
Из конца вектора проводим прямую,
параллельную
,
а из начала
прямую, параллельную
.
В точке b
пересечения этих пряных замыкается
силовой многоугольник и определяются
реакции
и
.
Масштабный коэффициент плана сил µF
выбирается произвольно и имеет размерность
Н/мм.
Путем графического сложения составляющих векторов определяем величину и направление полных реакций в шарнирах D и F.
![]() и
и
![]() .
.
При построении плана сил следует сначала сложить векторы всех сил, действующих на звено 5, а затем - на звено 4, или наоборот. Тогда из плана сил легко можно определить реакцию в среднем шарнире.
![]()
Переходим к группе 2, 3, II
класса, 2 вида. Освобождаем ее от связей
и вместо них прикладываем неизвестные
реакции
![]() и
и
![]() ;
последняя перпендикулярна направляющей
ползуна Х-Х (рис10, в).
;
последняя перпендикулярна направляющей
ползуна Х-Х (рис10, в).
Составляем уравнение равновесия для звена 2.
![]()
откуда
![]()
Составляем векторное уравнение равновесия для группы 2, 3.

и строим согласно уравнению
план сил. Для
этого от произвольной точки С
последовательно откладываем известные
по величине векторы сил
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Далее проводим линии, параллельные
реакции
.
Далее проводим линии, параллельные
реакции
![]() (из начала
)
и
(из начала
)
и
![]() (из конца
)
до их взаимного пересечения в точке d;
замыкаем план сил и
определяем величины
и направления этих реакций.
(из конца
)
до их взаимного пересечения в точке d;
замыкаем план сил и
определяем величины
и направления этих реакций.
Геометрически сложив и , находим полную реакцию в шарнире В:
![]() =
+
.
=
+
.
Реакцию в шарнире С определяем из плана сил согласно уравнению
![]() .
.
Для определения точки z приложения составляем уравнение равновесия для звена 3 в виде
![]() ,
,
откуда
![]() .
.