

1. Цель и методы синтеза механизмов
Целью кинематического синтеза механизма является проектирование его кинематической схемы, т.е. схемы, в которой имеются все необходимые размеры для определения движения звеньев по заданному закону движения начального звена. Задача синтеза состоит в определении недостающих размеров звеньев механизма.
В рассмотренных ниже задачах применены аналитические и графические методы, причем последние в тех случаях, когда они упрощают синтез и в тоже время не оказывают сколько-нибудь заметного влияния на свойства механизма. В некоторых задачах используются методы приближения функции, синтеза зубчатых передач и т.п.
2. Синтез кривошипно-ползунного механизма
Кривошипно-ползунный механизм (рис.1) применяется для преобразования вращательного движения кривошипа 1 в возвратно-поступательное движение ползуна 3, или, наоборот, возвратно-поступательного движения ползуна во вращательное движение кривошипа. Принятые обозначения:
r - длина кривошипа; l - длина шатуна; е - смещение направляющей ползуна х' - х' относительно оси Ах, λ = l/r; Η - ход ползуна; υ - угол давления (угол между х' - х' и шатуном); φ1 - угол поворота кривошипа; Kυ - коэффициент изменения средней скорости ползуна, определяется по формуле
![]() (1)
(1)
где φp - угол поворота кривошипа при рабочем (прямом) ходе ползуна; tp - время поворота кривошипа на φp; φx - угол поворота кривошипа при холостом (обратном) ходе; tx - время поворота на φx; Vc,ср.х и Vc,ср.р - соответственно средние скорости точки С при холостом и рабочем ходе ползуна определяются по формулам
![]()
Здесь φx / ω1 = tx, φp / ω1 = tp, tx + tp =T, где T = 60/n1 время одного оборота кривошипа в секундах; n1, об/мин - частота вращения его; ω1 = πn1/30, ω1, 1/с;
Θ, град. - угол между крайними положениями шатуна, определяется по формуле
![]() (2)
(2)
Для построения кинематической схемы механизма в положении, определяемом углом φ1, достаточно знать r, l, e.
После решения задачи синтеза механизма последовательность построения схемы механизма такая: выбирают направление Ax, проводят прямую х' - х', параллельную Ах на расстоянии е от нее; из точки А радиусом r описывают окружность, которую размечают в соответствии с заданным законом движения кривошипа; обычно принимают ω1 = const, в связи с чем удобно делить окружность на n равных частей в направлении ω1, например, n=12, при этом за начальное положение принимается, как правило, начало холостого хода, реже - рабочего. Из получаемых точек В', Β1, B2...B"...В' радиусом l делают засечки на прямой С'С", размечая таким образом, траекторию точки С: С', C1, C2...С"...С'. Соединяя последовательно точки В', Β1...Β' с точкой А и с соответствующими точками C', C1...С' получают кинематическую схему механизма в различных положениях.
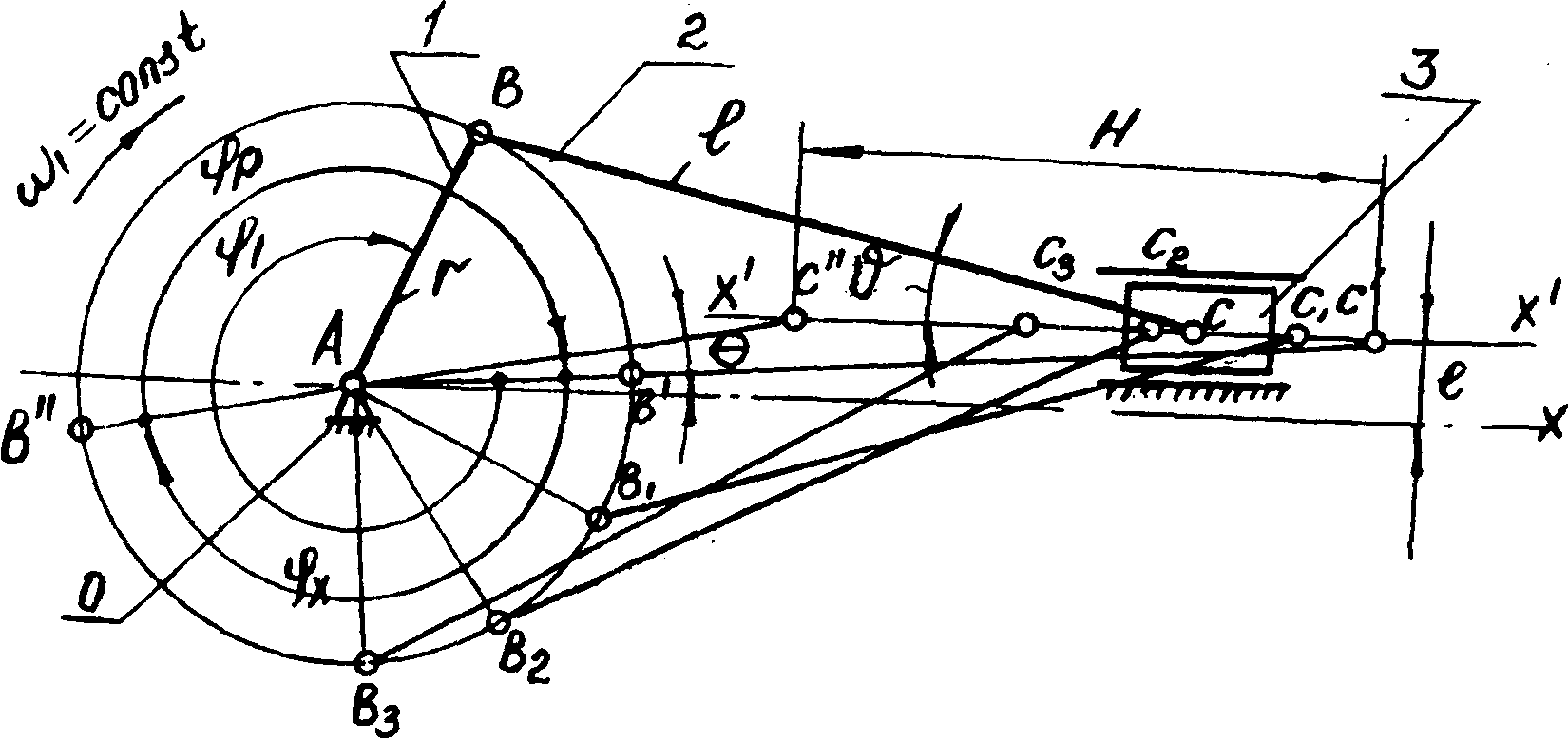
Рис. 1. Кривошипно-ползунный механизм
Ниже рассмотрены несколько задач синтеза кривошипно-ползунного механизма.
Задача 1.
Дано: Н, е, λ = l/г. Определить г и l.
Как видно из рис.1
![]() (3)
(3)
Таким образом, в треугольнике АС'С" известны: С"С' = Н, высота е и отношение сторон АС'/АС".
Построение треугольника производится в такой последовательности: откладывают отрезок С'С"=Н на выбранной прямой х' - х' (рис.2); проводят прямую х - х, параллельную С'С" на расстоянии е от нее; учитывая, что геометрическое место точек, отношение расстояний которых от двух заданных точек С' и С" остается постоянным, есть окружность Аполлония, строят ее. Для этого делят отрезок С'С" в соответствии с равенством (3), находят точки Д и Е; на отрезке ДЕ, как на диаметре, строят окружность. Искомая точка А лежит на пересечении окружности с прямой х-х. Тогда АС' = г+l,
АС"=l-г и
![]()
На рис.2 рассмотрено построение для Н = 50 мм, l=8 мм, λ=4.
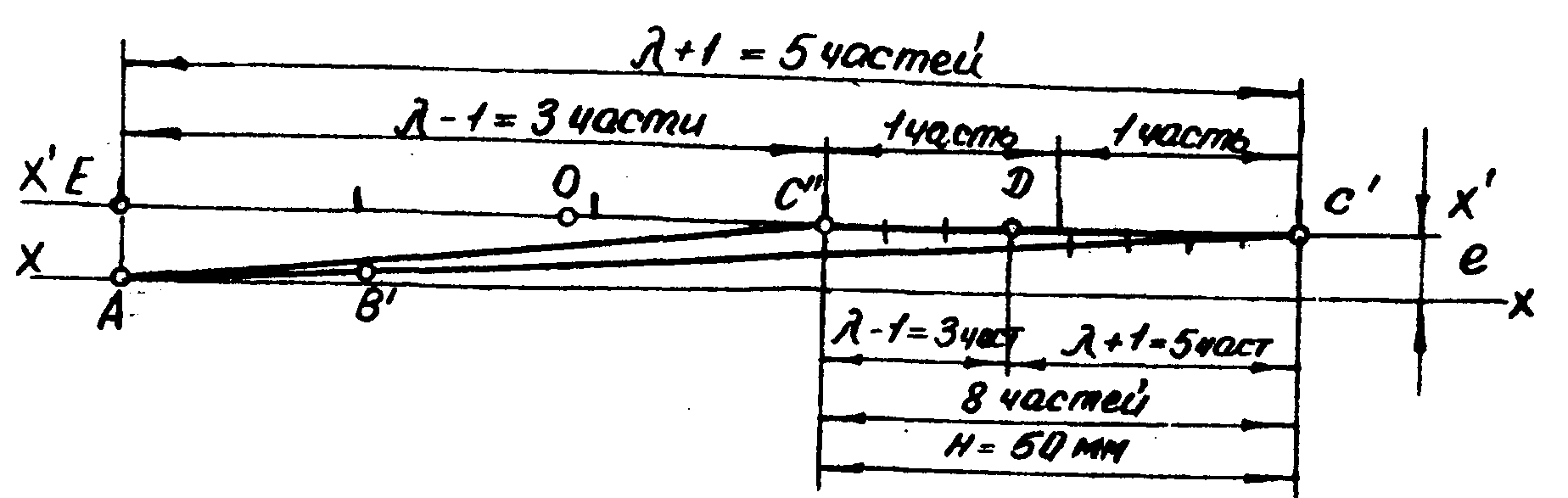
Рис.2. Построение окружности Аполлония
Аналитически определение величин г и l производится по формулам, которые получены при вычислении площади S треугольника С'С''А
![]()
где p - полупериметр треугольника
![]()
После преобразования получаем x2 + fx + q =0. Здесь х = г2,
 .
Определив
.
Определив
![]() ,находят:
,находят:
r =![]() и l = λ·r.
Для рассмотренного примера x1=620,70;
x2=43,36 и r1=24,91
мм, r2=6,58 мм. Из рис.2
видно, что подходит r1,
l = λ·r
=4·24,91 = 99,64 мм.
и l = λ·r.
Для рассмотренного примера x1=620,70;
x2=43,36 и r1=24,91
мм, r2=6,58 мм. Из рис.2
видно, что подходит r1,
l = λ·r
=4·24,91 = 99,64 мм.
Задача 2.
Дано: Η, Κv, νдоп. Определить г, l, е.
По формуле (2) находят Θ.
Откладывают отрезок С"С' = Н. Через
его середину проводят к нему перпендикуляр,
который является одной из сторон угла
Θ; вторая сторона проходит
через С', или С", рис. 3. Точка О,
вершина угла, будет центром вспомогательной
окружности радиуса R
= OC. Точка А должна
располагаться на этой окружности. Для
нахождения единственного из множества
положений точки вводится ограничение
по углу давления νдоп,
который и откладывают от х' - х' из точки
С". Центр вращения кривошипа, точка
А, находится на пересечении стороны
угла с окружностью. Тогда
![]()
Затем по формуле
![]() вычисляют величину e и
определяют г и l так
же, как это сделано в задаче 1.
вычисляют величину e и
определяют г и l так
же, как это сделано в задаче 1.
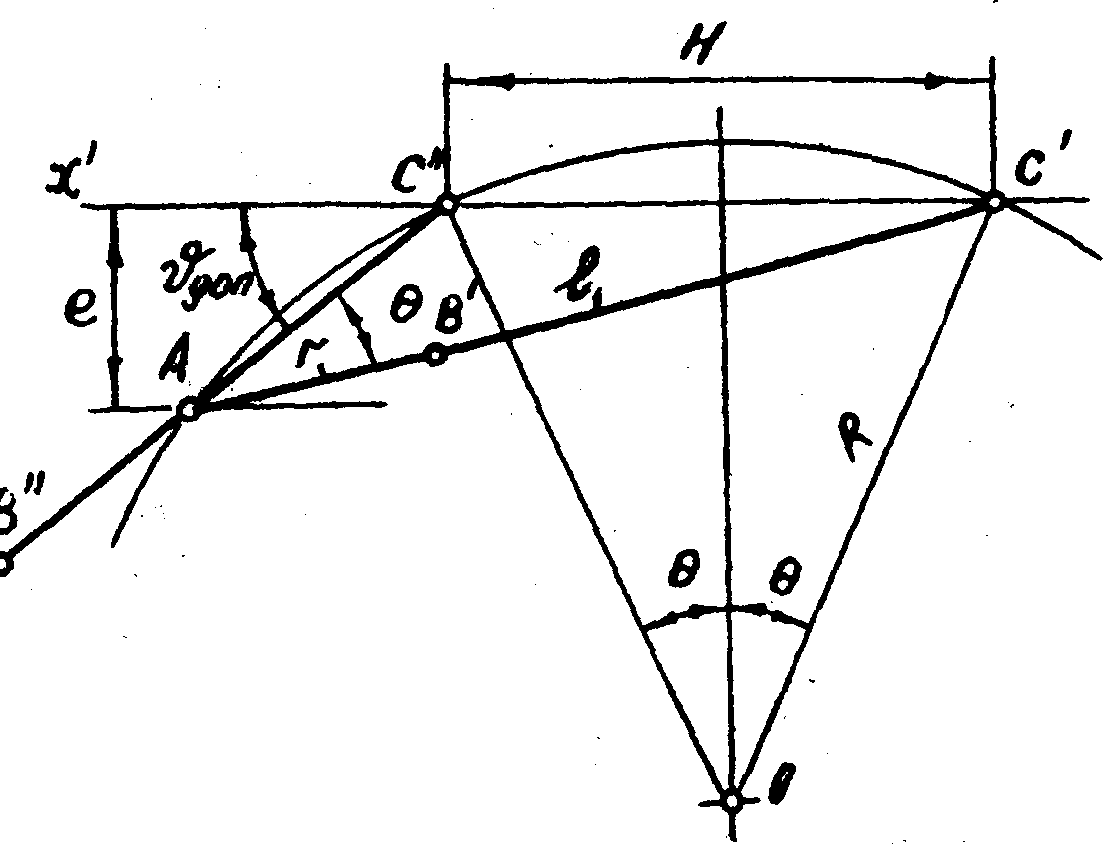
Рис.3. Определение размеров звеньев с помощью вспомогательной окружности