

7. Силовой расчет входного звена механизма
Рассмотрим определение реакций в кинематической паре, которая состоит из входного эвена co стойкой 0. Из уравнения Зη – 2p5 = 3*1 - 2*1 = 1 следует, что число уравнений на единицу больше числа неизвестных. Для того, чтобы было равновесие, необходимо ввести силу или пару, уравновешивающую все силы, приложенные к звену. Эта сила и момент пары называются уравновешивающей силой Fy и уравновешивающим моментом Μу.
Если рассматриваемый механизм является двигателем, например ДВС, то уравновешивающая сила или момент будут реактивными силой или моментом со стороны той рабочей машины, которая приводится в движение рассматриваемым двигателем; если рабочей машиной, например, строгальный станок, то они будут движущими силой или моментом, который должен быть приложен со стороны двигателя к входному звену рассматриваемого механизма. При соединении вала двигателя и входного вала рабочей машины муфтой к валу приложен момент уравновешивающий (рис. 12.а), при соединении зубчатой передачей - сила уравновешивающая, pacположенная под углом зацепления αw и общей касательной к начальным окружностям зубчатых колес (вдоль линии зацепления), рис. 12.б.
Для определения My или Fy нужно составить уравнение равновесия звена 1 в виде суммы сил, действующих на звено относительно неподвижной точки А:
![]() или
или
![]()
где G1
- сила тяжести звена
1;
![]() - реакция со стороны
звена 2, определяемая при расчете группы,
в которую
входит звено 2 (
- реакция со стороны
звена 2, определяемая при расчете группы,
в которую
входит звено 2 (![]() ),
),![]() - радиус начальной окружности
зубчатого колеса, взятый в масштабе
чертежа.
- радиус начальной окружности
зубчатого колеса, взятый в масштабе
чертежа.

Рис. 12. Входное звено
Для определения реакции
![]() стойки на звено 1
напишем уравнение равновесия сил для
эвена 1 в, векторной форме:
стойки на звено 1
напишем уравнение равновесия сил для
эвена 1 в, векторной форме:
а)
![]()
или
б)
![]()
Согласно уравнению построим
план сил, начиная с точки a
и замкнув его, определим
![]() .
.
8.3. Силовой расчет зубчатых передач
Рассмотрим пример силового расчета одноступенчатого планетарного редуктора (рис. 15).
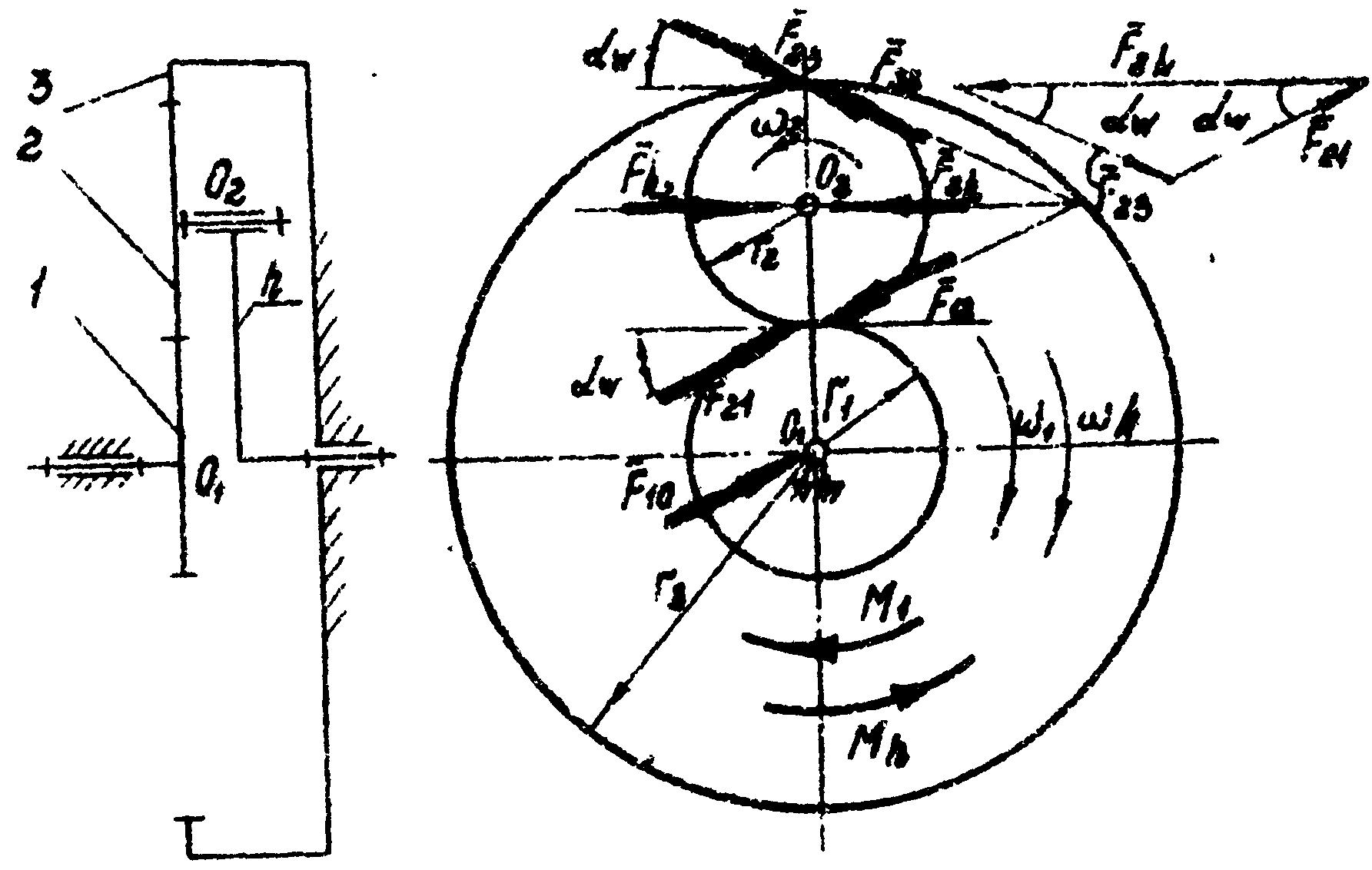
Рис. 15. Планетарный редуктор
Входным является колесо 1,
на него действует заданный движущий
момент Mi.
К водилу n
приложен момент сил сопротивления
Mn.
Определим Mn
и реакции в кинематических парах. Из
условий равновесия звена 1 определяем
реакцию со стороны зубьев второго колеса
на зубья первого
![]()
![]()
где
![]() - начальный радиус окружности 1-го колеса,
- начальный радиус окружности 1-го колеса,
![]() - угол зацепления; и реакцию стойки 0 на
колесо 1
- угол зацепления; и реакцию стойки 0 на
колесо 1
![]()
![]()
![]()
Из уравнения моментов
относительно оси O2
сил, действующих на звено 2, определяем
реакции![]() :
:
![]()
Из условия равновесия сил, действующих на звено 2, согласно векторному уравнению:
![]()
![]()
строим план сил и
определяем
![]() .Из
плана сил видно, что
.Из
плана сил видно, что
![]()
Наконец, из условий равновесия моментов и сил, действующих на водило h, определяем:
![]() ,
где
,
где
![]()
![]()
Ввиду соосности редуктора
![]() ,
или
,
или
![]()
Принимая это во внимание, можно преобразовать:
 ,
,
где
![]() - передаточное отношение
зубчатого механизма, полученного
после остановки водила (преобразованного
зубчатого механизма). Данный силовой
расчет произведен для редуктора с одним
сателлитом. Предлагаемая методика
расчета может быть распространена на
планетарные редукторы с несколькими
сателлитами и зубчатые механизмы с
неподвижными осями.
- передаточное отношение
зубчатого механизма, полученного
после остановки водила (преобразованного
зубчатого механизма). Данный силовой
расчет произведен для редуктора с одним
сателлитом. Предлагаемая методика
расчета может быть распространена на
планетарные редукторы с несколькими
сателлитами и зубчатые механизмы с
неподвижными осями.