

3. Порядок силового исследования механизма
Для того, чтобы произвести кинетостатический расчет механизма, необходимы следующие данные:
1) кинематическая схема механизма;
2) скорости и ускорения точек звеньев механизма;
3) массы и моменты инерции звеньев;
4) внешние силы и моменты.
Расчет производится в следующим порядке:
1) определение величины, точки приложения и направления сил инерции;
2) расчленение механизма на группы Ассура и определение реакций в кинематических парах групп;
3) установление момента уравновешивающего (сила уравновешивающая) и реакции со стороны стойки на входное звено.
4. Силы инерции звеньев
Из теоретической механики
известно, что при плоском движении звена
BC
(рис. 1) все силы инерции сводятся к
главному вектору сил инерции
![]() ,
приложенному в центре масс S
и главному
моменту Мu,
определяемым по формулам
,
приложенному в центре масс S
и главному
моменту Мu,
определяемым по формулам
![]() ,
где m
- масса
звеньев, кг;
,
где m
- масса
звеньев, кг;
![]() - вектор ускорения центра масс
звена, мс-2;
- вектор ускорения центра масс
звена, мс-2;
![]() - угловое ускорение, с-2,
- угловое ускорение, с-2,
![]()
![]() - момент инерции звена
относительно оси, проходящей через его
- момент инерции звена
относительно оси, проходящей через его
центр масс и перпендикулярной к плоскости движения, кгм2:
![]() или
или
![]() .
.
Здесь dm - элемент массы; r- расстояние элемента массы dm от оси, проходящей через центр масс; ρ - радиус инерции звена.
Примечание. При выполнении расчетов, в случае отсутствия данных, рекомендуется пользоваться следующими соотношениями:
а) массы звеньев, имеющих удлиненную формy (шатуны, коромысла, тяги) определяются по формуле m=mil,
где mi = 10...20 кг/м - масса погонного метра длины; l – длина звена, м;
б) массы ползунов в неподвижных направляющих в 2…4 раза больше масс шатунов. Массы кривошипа и ползунов на кулисах, ввиду того что они относительно малы, не учитываются;
в) центры масс звеньев выбираются по средине звена;
г) момент инерции звена удлиненной формы относительно оси, проходящей через его центр масс:
![]() ,
,
относительно оси, проходящей через его конец:
![]() ,
,
д) момент инерции круглого диска радиуса r, вращающегося вокруг оси, проходящей через его центр О:
![]() ,
,
е) момент инерция шатуна ДВС (рис. 2)
![]()

Рассмотрим частные случаи движения звеньев механизма:
1. Звено движется поступательно с переменной скоростью V.
![]() приложена в центре масс
и
направлена против
ускорения эвена
приложена в центре масс
и
направлена против
ускорения эвена
![]() .
.
Mи= 0, т.к. ε = 0.
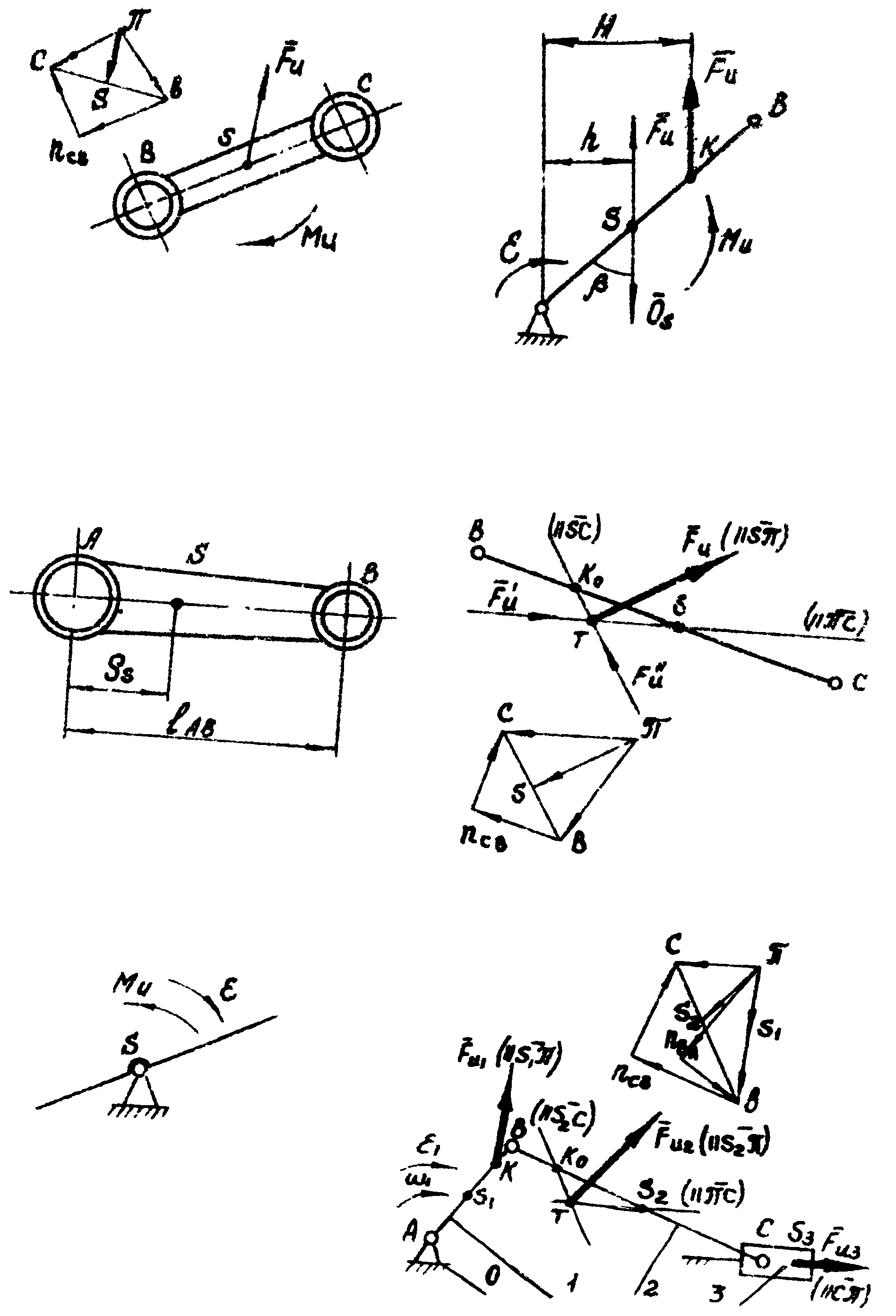
2. Звено вращается вокруг оси, проходящей через центр масс S (рис. 3).
F
= 0, т.к. as
= 0; Μ
=-![]() ε.
ε.
Если вращение равномерное, то
Ми = 0, т.к. Ε = 0
3. Звено вращается вокруг оси, не проходящей через центр масс (рис. 4).
![]() ,
Μ
=-
ε.
,
Μ
=-
ε.
Сила
![]() и пара Μи
могут быть заменены одной результирующей
силой Fи,
приложенной в центре качения.
и пара Μи
могут быть заменены одной результирующей
силой Fи,
приложенной в центре качения.
Доказательство
![]() ,
(1)
,
(1)
где h
= lAS*sinβ;
Is=mρ2;
|Ε|
=
![]()
Подставляя эти выражения в формулу (1), получим;
![]() .
.
Откладываем от точки А отрезок АK, равный
![]() ,
(2)
,
(2)
тогда
![]() .
.
Таким
образом, силы инерции звена АВ могут
быть сведены к одной результирующей
силе
![]() .
Эта сила приложена в точке К, положение
которой определяется по формуле (2).
Точка К называется центром качания, так
как представляет собой точку, аналогичную
одноименной точке физического маятника.
Она всегда находится дальше от оси
вращения звена, чем точка S.
.
Эта сила приложена в точке К, положение
которой определяется по формуле (2).
Точка К называется центром качания, так
как представляет собой точку, аналогичную
одноименной точке физического маятника.
Она всегда находится дальше от оси
вращения звена, чем точка S.
4. Звено совершает плоское движение (рис. 5).
Ускорение центра мясc S звена
![]() (3)
(3)
Умножим равенство (3) на –m.
![]() .
.
Первое слагаемое представляет
силу инерции в переносном поступательном
движении с ускорением
![]() ,
которая направлена противоположно
.
Второе слагаемое - силу инерции в
относительном вращательном движении
звена вокруг точки С; онa
направлена против
,
которая направлена противоположно
.
Второе слагаемое - силу инерции в
относительном вращательном движении
звена вокруг точки С; онa
направлена против
![]() .
Первая сила, как сила инерции в
поступательном движении
.
Первая сила, как сила инерции в
поступательном движении
![]() ,
может быть приложена в центре масс S
звена; вторая, как
сила инерции во вращетельном движении
вокруг С
,
может быть приложена в центре масс S
звена; вторая, как
сила инерции во вращетельном движении
вокруг С
![]() ,
приложена в центре качания K0
в предположении, что точкой подвеса
является точка С. Положение центра
качения определится по формуле
,
приложена в центре качания K0
в предположении, что точкой подвеса
является точка С. Положение центра
качения определится по формуле
![]() .
.
Результирующая сила инерции
![]() .
.
Продолжив линии действия
![]() и
и
![]() найдем точку их
пересечения (мгновенный центр качания)
Т, через которую проходит линия действия
,
величина Fu
= mas,
а направлена она против
найдем точку их
пересечения (мгновенный центр качания)
Т, через которую проходит линия действия
,
величина Fu
= mas,
а направлена она против
![]() .
.
Пример. Определим силы инерции звеньев кривошипно-ползунного механизма, кинематическая схема которого представлена на рис.6. Входное звено АВ вращается с угловой скоростью ω1 и угловым ускорением ε1. Массы звеньев и их моменты инерции известны; буквами S с соответствующими индексами обозначены центры масс звеньев.
По заданным ω1, и ε1 строятся план скоростей и план ускорений механизма (план скоростей на рисунке не показан). Вычисляются величины сил инерции отдельных звеньев:

Звено
1 совершает
неравномерное вращение, его сила инерции
![]() ,
приложена в точке К,
расстояние до которой определяется по
формуле
,
приложена в точке К,
расстояние до которой определяется по
формуле
![]()
а направлена она против
направления
![]() .
Шатун 2 находится в плоском движении;
центр качания его - точка К0
(при условии подвеса звена в точке
С) определится по формуле
.
Шатун 2 находится в плоском движении;
центр качания его - точка К0
(при условии подвеса звена в точке
С) определится по формуле
![]()
Точка Т приложения силы
инерции звена найдется на пересечении
прямой, параллельной ускорению
точки С, проведенной
через точку S2,
с прямой, параллельной относительному
ускорению
![]() ,
проведенной через точку K0.
Сила
,
проведенной через точку K0.
Сила
![]() направлена против
направлена против
![]() .
.
Ползун 3 движется поступательно,
следовательно, его сила инерции
![]() приложена в центре
масс S3
звена, и направлена против
приложена в центре
масс S3
звена, и направлена против
![]() .
.