

3.6.4Програмовані логічні матриці
Програмовані логічні матриці (ПЛМ) в загальному розрізняють двох типів – комбінаційні і послідовнісні. Послідовнісні ПЛМ мають властивості комбінаційних + містять вбудовані регістри пам’яті. Останнім часом ця галузь цифрової техніки невпинно розвивається, кількість типів послідовнісних ПЛМ зростає мало не кожного року, структура їх щоразу ускладнюється, тому вони є предметом вивчення окремого курсу. Для програмування ПЛМ розроблені спеціальні вхідні мови, на зразок VHDL, AHDL, і т.д., тому ми розглянемо тільки елементарні положення ПЛМ.
Комбінаційна логічна матриця – це пристрій, який може бути представлений мережею взаємоперпендикулярних провідників, в місцях перетину яких знаходяться напівпровідникові елементи – діоди або транзистори, що ввімкнені через легкоплавкі перемички до відповідних провідників матриці.
Під час програмування логічної матриці перемички перепалюють імпульсами струму або зберігають у відповідності до необхідної таблиці, яка відображає необхідний рисунок програмування. Таким чином у комбінаційній ПЛМ може бути реалізована система з m бульових функцій до n вхідних змінних, що містять разом не більше як l терм (складових). В залежності від типу ПЛМ значення m,n,l відрізнятимуться. Структура комбінаційної ПЛМ наведена на рис.3.16.
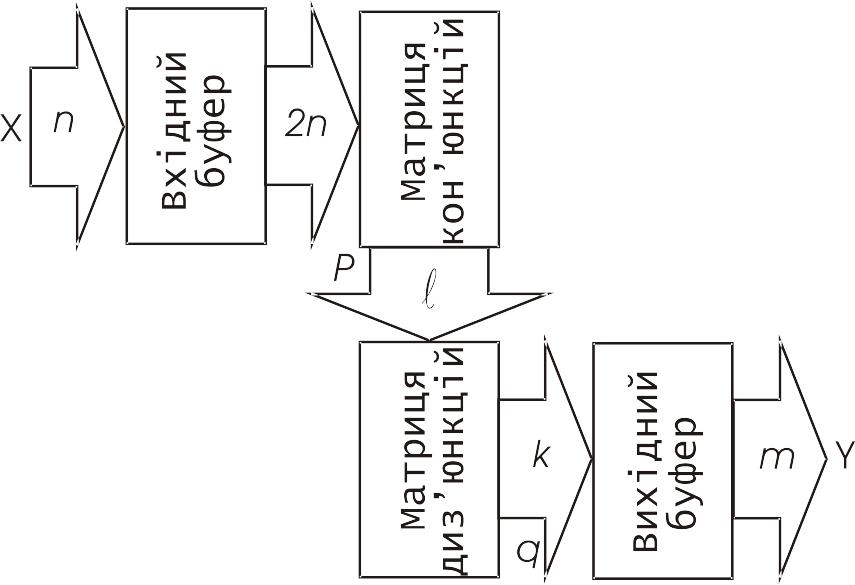
Рис. 3.42 Структура комбінаційної ПЛМ
ПЛМ складається з матриці кон’юнкцій
створюють терми виду
![]() та матриці диз’юнкцій які виконують
лог. операцію „АБО” над цими термами.
Вхідний буфер крім буферування, здійснює
ще й іверсію всіх змінних Х, тому вихідна
шина буфера має 2n провідників.
та матриці диз’юнкцій які виконують
лог. операцію „АБО” над цими термами.
Вхідний буфер крім буферування, здійснює
ще й іверсію всіх змінних Х, тому вихідна
шина буфера має 2n провідників.
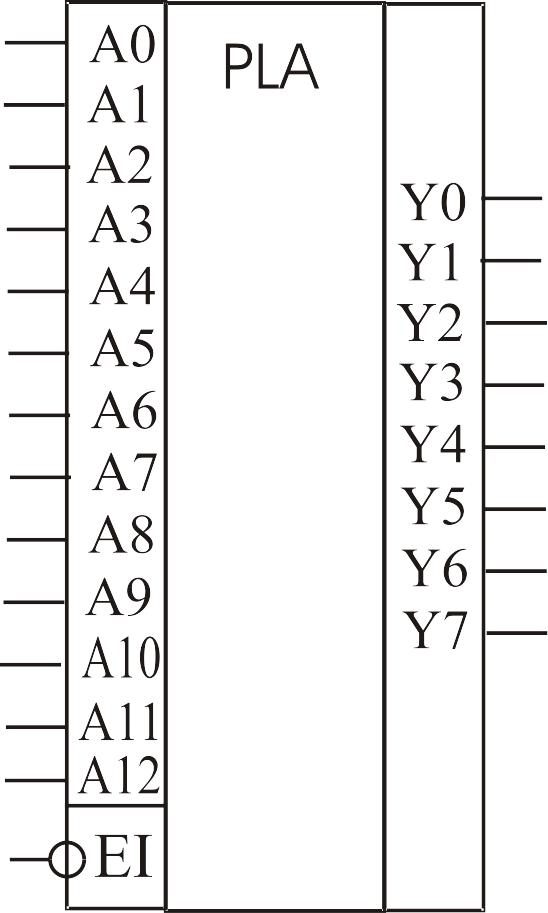
Рис. 3.43 Схематичне позначення ПЛМ
Позначення ПЛМ наведене на рис.3.17. Приклад типів комбінаційних ПЛМ: К556РТ1, К556РТ2. Їх основні параметри m=8, n=16, l=48. На даний час ці ІС слід вважати застарілими, в основному через високе енергоспоживання у порівнянні із сучасними зарубіжними взірцями, тому використовувати їх в сучасних розробках не рекомендовано.
Контрольні запитання по розділу
Чи може у простого дешифратора бути активними декілька вихідних ліній?
Будова дешифратора. Основні принципи.
Будова мультиплексора. Основні принципи.
Мультиплексори та демультиплексори. Основні відмінності.
Як здійснюється каскадування дешифраторів?
В чому полягає синтез комбінаційних пристроїв на основі дешифраторів?
В чому полягає синтез комбінаційних пристроїв на основі мультиплексорів?
Принцип дії цифрових компараторів.
Будова напівсуматора.
Будова повного суматора.
Які функції може виконувати арифметико-логічний пристрій?
Що таке ПЛМ?
Відмінність між комбінаційними та послідовнісними ПЛМ.
4.Послідовнісні пристрої
4.1Особливості функціонування послідовнісних пристроїв
Переважна більшість сучасних цифрових пристроїв є послідовнісними (ПП) або цифровими автоматами з пам’яттю, тобто такими, що складаються з комбінаційної частини (або КП) і елементів пам'яті запам’ятовувачів інформації. Сама наявність запам’ятовувачів у ПП хоч і ускладнює його роботу, але й значно розширює функціональні можливості ПП. Разом з тим вони є причиною появи додаткової змінної часу, який потрібно враховувати як при аналізі, так і при синтезі ПП.
Таблиця 4.15 Табличне представлення автомата Мура.
Вхідний набір Х |
Стан і вихід |
|||
q0 |
q1 |
… |
qk-1 |
|
y1 |
y0 |
… |
yj |
|
X0 X1 … Xn-1 |
q2 q0 … ~ |
q0 q1 … q2 |
… … … … |
qi ~ … qj
|
Як бачимо, автомат Мура, який задається табл.4.1, має виходи, які однозначно визначені його станами, і тому вони можуть бути вказані біля вершин графа. Для автомата Мілі, однак, потрібно вказувати пару Xi/Yj, бо їх ииходи залежать як від станів, так і від вхідних наборів.
Порівняно з іншими способами зображення логічного функціонування ПП графічний спосіб є найбільш наочний.
Приклад: Побудувати граф абстрактного автомата Mілі, що заданий сумісною таблицею переходів (табл. 4.2).
Таблиця 4.16 Cумісна таблиця переходів автомата Mілі
{Xt} |
q0t |
q1t |
q2t |
q3t |
00 01 10 11 |
q1/1 q2/0 q3/1 q0/~ |
q1/0 q1/1 q3/0 q3/1 |
q0/0 q3/~ q0/1 q2/1 |
q3/1 q0/0 q0/0 q2/0 |
Розв’язання. Для зручності стани {qit} автомата позначимо просто цифрами, що відповідають номеру стану, і розмістимо їх в середині кружечків. Граф таблично заданого автомата показаний на рис. 4.1.
Рис. 4.44 Граф автомата Мілі у відповідності до таблиці 4.2
Зауважимо, що у даному прикладі є кількa однакових переходів станів, які відбуваються під дією різних вихідних сигналів. Це, зокрема, переходи q1t→ q1 – 00/0v01/1; q1t→ q3 – 10/0v11/1; q2t→ q0 – 00/0v10/1; q3t→ q0 – 01/0v10/0.
Оскільки ці пaри вхід/вихід при переході i→j мають байдужі розряди (0/1), їх зручніше зобразити так, як це ілюструє граф, а саме: q1t→ q1 – 0~/~; q1t→ q3 – 1~/~; q2t→ q0 – ~0/~; q3t→ q0 –https://studfile.net/0.