

2.6.3Тристановий драйвер
Шини передачі інформації, це як правило довгі провідники, що мають значні паразитні ємності і тому чутливі до завад. Крім того, активний вихід ЛЕ незручний у тих ситуаціях, коли потрібно вести обмін даними одночасно з кількома функціональними блоками або вузлами, як це має місце у мікропроцесорній техніці.
Якщо різні цифрові вузли під’єднані до інформаційної шини за допомогою ЛЕ, які можуть виводити на свої вихідні лінії тільки лог.0 або лог.1, то може виникнути ситуація, коли одна частина пристрою "вимагає" один логічний рівень, інша – інший. За таких умов фактичних стан лінії стає невизначеним, бо виникає конфлікт на шині, коли кожний з пристроїв намагається встановити на лінії свій рівень.
Сумісну роботу кількох блоків на одній лінії інформаційної шини забезпечує ЛЕ з трьома вихідними станами. Це так званий тристановий драйвер, або Z-буфер, у якого на виході крім звичайних двох станів (0 і 1) є ще третій - "обрив", тобто високоомний вихід. Вихідний опір ЛЕ в третьому (так званому стані Z) становить сотні кілоом. ЛЕ з трьома станами поєднує всі переваги базового ЛЕ - високу швидкодію та завадостійкість, а також здатність працювати на загальну шину, що властиво для ЛЕ з відкритим колектором.
Рис. 2.14 Тристановий
драйвер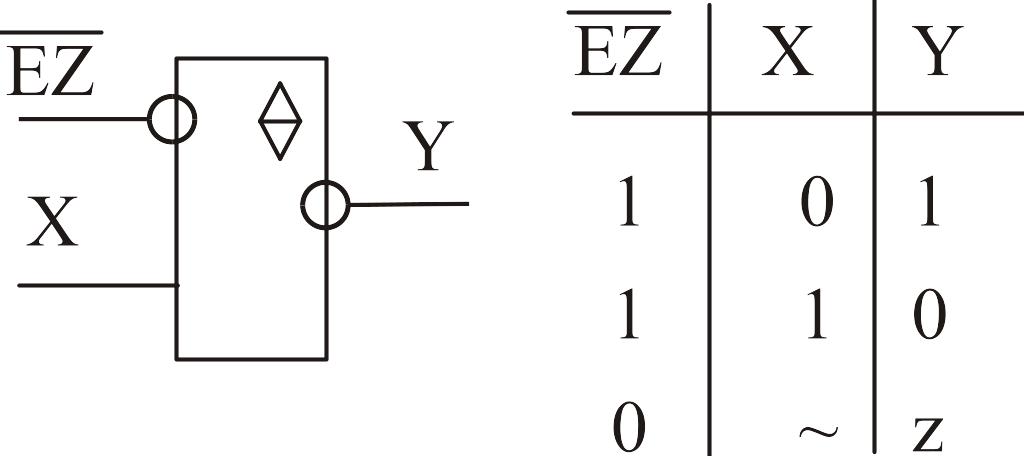
![]() .
.
Тристанові КМОН-драйвери відрізняються від ТТЛ-драйверів меншою швидкодією, у стані вони забезпечують практично ідеальну розв’язку (вихідний опір > 10 МОм).
Тристанові КМОН-драйвери успішно використовують як буферні підсилювачі при роботі на значне ємнісне навантаження. Зокрема, мікросхеми К561ЛН1, 564ЛН1, 564ЛН2 можна ефективно використовувати для побудови оперативних запам’ятовувальних пристроїв очікувальних мультивібраторів, при роботі на довгі лінії тощо.
Час затримки
поширення сигналу у цих ЛЕ залежить від
напруги живлення, яку для МОН-структур
можна змінювати у широких межах.
Наприклад, для мікросхеми К561ЛН1
![]() нс при
нс при
![]() В,
а час переходу від стану
у
становить 40 нс.
В,
а час переходу від стану
у
становить 40 нс.
При
![]() В,
що потрібно для узгодження з ЛЕ ТТЛ,
всі перехідні процеси збільшуються у
3 рази.
В,
що потрібно для узгодження з ЛЕ ТТЛ,
всі перехідні процеси збільшуються у
3 рази.
Тристанові драйвери широко застосовують у цифрових мікропроцесорних системах як шинні формувачі, для двонапрямлених ліній.
2.7 Інтерфейсні мікросхеми
Завдяки розвитку мікропроцесорної техніки з’явився новий клас цифрових мікросхем - інтерфейсних. Вони, як правило, побудовані на СІС і ВІС і не призначені для виконання логічних операцій їх основне призначення– організація міжблокових з’єднань та інтерфейсів цифрових систем (мікроЕОМ).
Кожний блок цифрової системи зв’язаний з іншим блоком шиною. Шини, що передають по своїх лініях двійкову інформацію у вигляді слів, бувають одно- та двонапрямленими. Однонапрямлені шини забезпечують передання цифрових сигналів лише в одному напрямі - від джерела (передавача) інформації до приймача. До них належать адресні та шини керування. Двонапрямлені шини - це, як правило, шини даних, з допомогою яких сигнали передаються в обох напрямах (хоча при потребі можуть використовуватись як однонапрямлені).
Оптимальне функціонування блоків цифрової системи значною мірою залежить від впливу шини на параметри та характеристики сигналу. Адже сигнали, що виробляє передавач, пройшовши певну відстань по шині до приймача, практично завжди втрачають свою форму (особливо при переданні сигналів по кабелю, який має велику ємність) і погіршують свої характеристики та параметри. Саме тому блоки чи вузли цифрової системи під’єднують до шини не безпосередньо, а через інтерфейсні мікросхеми - модулі, які забезпечують оптимальне міжблокове спряження.
Можна виділити інтерфейсні мікросхеми, що утворюють групу так званих шинних передавачів-приймачів (ШПП). Основне призначення ШПП полягає у підсиленні електричних сигналів, що передаються по двонапрямлених лініях зв’язку (шинах), а також для узгодження рівнів цих сигналів і реалізації функцій часової та логічної буферизації даних. Найпростіші серед інтерфейсних мікросхем шинні формувачі (ШФ), або шинні драйвери. ШФ орієнтовані головним чином для ретрансляції сигналів та електричного узгодження однонапрямлених шин.
Логічний стан (0 або 1) лінії шини у будь-який момент часу визначається рівнем сигналу, який у вигляді струму проходить з одного блока в інший. Чим більше блоків під’єднано до лінії, тим більша сила струму навантаження; і якщо вона перевищує припустиме значення, це може призвести до невідповідності логічних рівнів на шині. Тому надлишковий струм, що при цьому виникає, необхідно якимось чином зняти з лінії. Ця процедура носить назву буферування і реалізується з допомогою ШПП, що в даному випадку відіграє роль звичайного повторювача (буфера). Отже, буферування служить для підтримання параметрів сигналу у припустимих межах. Ця процедура особливо необхідна при значному ємнісному навантаженні. Наприклад, для передання сигналу по довгому кабелю, що має велику ємність, буфер потрібно встановлювати зразу на виході передавача до кабеля. Для буферування шин застосовують інтерфейсні мікросхеми, що побудовані на ЛЕ а відкритим колектором або на тристанових драйверах. Ці ЛЕ, крім того, дозволяють реалізувати на кожній лінії шини монтажу логіку з різними блоками системи, зокрема "монтажне АБО" для об’єднання їх виходів.
Залежно від числа блоків, що під’єднані до шини, ступінь її навантаження буде різним. Тому системні (магістральні) шини мають вищу навантажувальну здатність, бо до них під’єднується велика кількість блоків та вузлів системи. Значно меншу навантажувальну здатність мають локальні шини даних, бо вони під’єднуються до окремих блоків системи.
Схеми ШПП і ШФ виконують (в основному на ТТЛШ) чотирирозрядними (К589АПІ6, К589АП26, 555ИП6), восьмирозрядними (К580ВА86/87, 555АП6) і як здвоєні чотирирозрядні (КІ533АПЗ).

,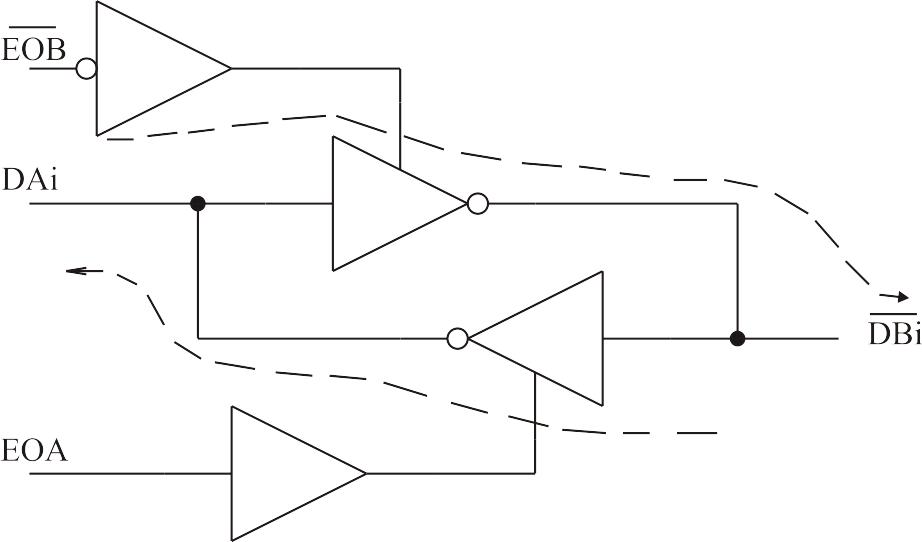
Рис. 2.15 Один канал і схемне позначення двонапрямленого ШПП
Принцип дії двонапрямленого ШПП пояснює
рис 2.13 та табл. 3.4.У колі кожного
каналу (чи розряду) схеми буфера ввімкнені
зустрічне два тристанові драйвери,
роботою кожного з яких (через повторювачі)
керують сигнали дозволу
![]() і
і
![]() .
.
Таблиця 2.9 Режими роботи ШПП
Значення керуючих сигналів |
Напрям передачі інформації |
|
|
|
|
0 |
0 |
Від
|
0 |
1 |
Передача відсутня |
1 |
0 |
Заборона |
1 |
1 |
Від
|
Для сигналу
![]() активним є високий рівень (лог.1), а для
сигналу
- низький рівень (лог.0). Отже, при
активним є високий рівень (лог.1), а для
сигналу
- низький рівень (лог.0). Отже, при
![]() (
(![]() )
відбувається передача від
)
відбувається передача від
![]() до
до
![]() ,
бо працює нижній драйвер. При
,
бо працює нижній драйвер. При
![]()
![]() працює верхній драйвер, і сигнал
передається від
до
.
Передача сигналу буде відсутня при
,
бо тоді обидва драйвери переходять у
високоімпедансний стан
працює верхній драйвер, і сигнал
передається від
до
.
Передача сигналу буде відсутня при
,
бо тоді обидва драйвери переходять у
високоімпедансний стан
![]() .
Зрозуміло, що одночасна дія двох активних
сигналів
.
Зрозуміло, що одночасна дія двох активних
сигналів
![]() і
і
![]() недопустима.
недопустима.
Слід зауважити, що в деяких випадках замість ШПП або ШФ залежно від навантаження на шину можна застосувати К155ЛН1, К555ЛН1, К56ІЛН1 або К555ЛН2, К155ЛНЗ, К155ЛН5, які забезпечують підвищену навантажувальну здатність у порівнянні з іншими представниками своїх серій ІС.