

3.7. Основные достоинства метода дп
1. Идея и метод ДП наиболее приспособлены к дискретным задачам, каковыми являются задачи из экономики.
2. Метод ДП применим при любом способе задания Fц и любом допустимом множестве состояний и управлений. Этого преимущества лишены классические методы оптимизации и другие вычислительные методы математического программирования.
3. Вычислительные схемы метода ДП в дискретном случае связаны с перебором оптимальных значений показателя эффективности и управления на k-м шаге для всех возможных значений переменной состояния, но объем расчетов по этому методу значительно меньше, чем при прямом переборе вариантов. Это связано с тем, что на этапе условной оптимизации неудачные варианты сразу отбрасываются, а сохраняются лишь условно оптимальные на данном шаге.
4. Метод ДП дает возможность анализа чувствительности к изменению исходных данных Sk и n. Фактически здесь решается не одна задача, а множество однотипных задач для различных состояний Sk и различных k (1 k n) на каждом шаге. Поэтому при изменении исходных данных можно не решать задачу заново, а сделать лишь несложные добавления к уже выполненным расчетам, т.е. продолжить уже решенную задачу за счет увеличения числа шагов n или числа значений Sk.
3.8. Типовые задачи в моделях дп
Задача 1. Задача маршрутизации.
Задача маршрутизации является основной задачей индексного метода в теории графов и ставится для произвольного орграфа без контуров. Модель ДП для этой задачи демонстрирует связь ИМ и ДП.
1. Особенностью модели ДП для задачи маршрутизации является отсутствие уравнения состояний (1), так как роль переменных состояния Sk и роль переменных управления uk выполняют попеременно одни и те же вершины графа, т.е. или ak = Sk, или ak = uk.
Рассмотрим, что происходит при условной оптимизации, учитывая, что при прямом ходе управлением являются левые вершины дуг, а при обратном – правые.
При прямом ходе проходятся следующие дуги:
–на
k-м
шаге: (ak–1,
ak)
(ak
= Sk);
–на
(k+1)-м
шаге: (ak,
ak+1)
(ak
= uk).
При обратном ходе проходятся дуги:
–на
(k+1)-м
шаге: (ak,
ak+1)
(ak
= Sk);
– на k-м шаге: (ak–1, ak) (ak = uk).
Теперь
рассмотрим, что происходит при безусловной
оптимизации, когда для поиска решения
задачи (т.е. оптимального маршрута)
используется уравнение состояний. Итак,
при обратном ходе имеем цепочку:
(S0 u1 S1 u2 S2 … un Sn)
или
(a0 a1 a1 a2 a2 … an an),
или
(a0 a1 a2 … an),
что является решением задачи. Переходы (uk Sk) пропадают и надобность в уравнении (1) отпадает. Остаются только переходы (Sk–1 uk) или дуги (ak–1, ak), связывающие два соседних уровня Ek–1 и Ek. Аналогично происходит и при прямом ходе. Следовательно, роль уравнения состояний выполняют дуги уровней (Ei–1, Ei) при обратном ходе и дуги уровней (Ei, Ei+1) при прямом.
2. Показателем эффективности k-го шага являются веса дуг vk(ak–1, ak), т.е. стоимости перехода от Ek–1 к Ek. Тогда суммарный показатель эффективности
![]() (тип
2)
(тип
2)
где F – целевая функция.
Задача теперь формулируется стандартно: требуется найти последовательность вершин a0, a1,…, an, переводящую систему из a0 в an, и оптимизирующих F, т.е. приводящих Z к оптимуму (см. общую постановку задачи ДП).
3. Критерий эффективности k-го шага.
Вводится суммарный показатель эффективности за первые k шагов для прямого хода:
![]()
или за последние (n – k) шагов для обратного хода:
![]()
4. Теперь функциональные уравнения Беллмана можно записать в следующем виде.
В общем случае:
– для обратного хода:
![]() так
как
так
как
![]() (тип 3)
(тип 3)
![]() (тип
4)
(тип
4)
при этом opt Z = Z0(S0);
– для прямого хода:
![]() так
как
так
как
![]() (тип 3')
(тип 3')
![]() (тип
4')
(тип
4')
при этом opt Z = Zn(Sn).
При последовательном графе:
– для обратного хода:
![]() так
как
так
как
![]() (тип 3)
(тип 3)
![]() (тип
4)
(тип
4)
при этом opt Z = Z0(S0);
– для прямого хода:
![]() так
как
так
как
![]() (тип 3')
(тип 3')
![]() (тип
4')
(тип
4')
при этом opt Z = Zn(Sn).
5. Безусловная оптимизация проводится упрощенно по последовательности условных оптимальных управлений {uk(Sk)}. Результатом ее является последовательность вершин с условными оптимумами {Zk(Sk)}:
(a0 a1 … an–1 an) – для обратного хода и
(an an–1 … a1 a0) – для прямого хода.
Связь с индексным методом очевидна:
![]()
6. Иллюстративный пример. Пусть задан последовательный орграф без контуров с весами vk(ak–1, ak) на дугах (рис. 3.1).
Поскольку граф последовательный, то на множестве его вершин заведомо задана порядковая функция.
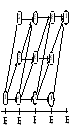
Веса на дугах vk(ak–1, ak) зададим списком:
|
v1 (1, 2) = 10 |
v2(2, 5) = 3 |
v3(5, 8) = 2 |
v4(8, 11) = 2 |
|
v1 (1, 3) = 8 |
v2(3, 5) = 6 |
v3(6, 8) = 3 |
v4(9, 11) = 5 |
|
v1 (1, 4) = 5 |
v2(4, 5) = 9 |
v3(7, 8) = 4 |
v4(10, 11) = 6 |
|
|
v2(3, 6) = 3 |
v3(6, 9) = 2 |
|
|
|
v2(4, 6) = 6 |
v3(7, 9) = 3 |
|
|
|
v2(4, 7) = 3 |
v3(7, 10) = 2 |
|
Требуется найти путь S(1, 11) при условии Z = min. Воспользуемся прямым ходом, т.е. будем двигаться от E0 к E4, последовательно выписывая и решая функциональные уравнения
Z0(a0) = Z0(1) 0 (по построению).
Z1(a1) = Z0(1) + v1(1, a1) = 0 + v1(1, a1),
тогда
Z1(2) = v1(1, 2) = 10, a0 = 1;
Z1(3) = v1(1, 3) = 8, a0 = 1;
Z1(4) = v1(1, 4) = 5, a0 = 1.
![]()
тогда
![]()
= min (10 + 3, 8 + 6, 5 + 9) = 13, a1 = 2;
![]()
= min (8 + 3, 5 + 6) = 11, a1 = 3, 4;
![]()
![]()
тогда
![]()
= min (13 + 2, 11 + 3, 8 + 4) = 12, a2 = 7;
![]()
= min (11 + 2, 8 + 3) = 11, a2 = 7;
![]()
![]()
тогда
![]()
= min (12 + 2, 11 + 5, 10 + 6) = 14, a3 = 8.
Выпишем полученные условные оптимумы Zk(ak) и соответствующие им управления в виде таблицы:
|
Z0(1) = 0 |
Z3(8) = 12, a2 = 7 |
|
Z1(2) = 10, a0 = 1 |
Z3(9) = 11, a2 = 7 |
|
Z1(3) = 8, a0 = 1 |
Z3(10) = 10, a2 = 7 |
|
Z1(4) = 5, a0 = 1 |
Z4(11) = 14, a3 = 8 |
|
Z2(5) = 13, a1 = 2 |
|
|
Z2(6) = 11, a1 = 3, 4 |
|
|
Z2(7) = 8, a1 = 4 |
|
Очевидно,
что
![]()
Остается определить сам путь S(1, 11), т.е. последовательность вершин, переводящую систему из a0 = 1 в a4 = 11. Такая последовательность в данном случае, как следует из модели, находится обратным ходом по условным экстремумам Zk и условным управлениям uk = ak, полученным в результате решения функциональных уравнений. Эту процедуру называют безусловной оптимизацией. В результате получим
S(11, 1) = 11, 8, 7, 4, 1
или
S(1, 11) = 1, 4, 7, 8, 11.
Можно теперь определить длину найденного min пути S(1, 11) непосредственно: S(1, 11) = v1(1, 4) + v2(4, 7) + v3(7, 8) + v4(8, 11) = = 5+3+4+2 = 14. Задача решена.
Задача 2. Задача коммивояжера.
К этой задаче сводятся многие прикладные задачи, связанные с обслуживанием пространственно распределенных объектов (клиентов). Она представляет собой частный случай задачи маршрутизации, на которую наложены дополнительные условия (ограничения):
начальная и конечная вершины совпадают, a0 = an;
все вершины должны быть пройдены, т.е. любая ai S(a0, an);
каждая вершина проходится только один раз, т.е. (ai, aj S(a0, an)) (ai aj);
известны расстояния между вершинами v(ai, aj), но не задана ориентация пар (ai, aj).
Конечно, принципиально модель ДП остается прежней. Но из-за этих условий вычислительная схема тактически становится несколько иной, приобретая ряд особенностей:
из-за условия 4 задача не имеет исходного графа. Очевиден лишь первый шаг, когда фиксирована вершина a0;
по условию 2 очередной шаг может быть сделан только после выявления вершин, пройденных на предыдущих шагах;
при этом приходится отбрасывать варианты, в которых не выполняется условие 3;
из-за условия 1 задача не имеет обратного хода, так как с учетом сказанного обратный ход будет просто совпадать с прямым;
результаты решения функциональных уравнений целесообразно вынести на граф условных оптимумов, который, как инструмент перебора, позволяет не только выявить варианты решения при безусловной оптимизации, но и обнаружить варианты условной оптимизации на k-м шаге, т.е. организовать без ошибок k-й шаг.
Итак, модель задачи строится в процессе решения, так как очередной шаг можно определить только после условной оптимизации на предыдущем. Это связано с тем, что множество возможных состояний на данном шаге определяется не только множеством оптимальных состояний и управлений на предыдущем, но и условиями задачи. Иначе решение задачи выходит на полный перебор (n-факториал!).
Отсюда и особенность вычислительной схемы: граф задачи строится по шагам (т.е. функциональные уравнения очередного шага) по мере отыскания условных оптимумов и условных управлений на каждом предыдущем шаге в соответствии с условиями задачи. Таким образом, граф задачи, граф условных оптимумов и функциональные уравнения приходится строить и решать одновременно (см. иллюстрированный пример).
Иллюстративный пример
Пусть
![]() матрица
стоимостей перехода из одного пункта
в другой.
матрица
стоимостей перехода из одного пункта
в другой.
|
|
|
1 |
2 |
3 |
4 |
5 |
|
1 |
× |
4 |
3 |
2 |
1 | |
|
2 |
4 |
× |
4 |
3 |
2 | |
|
3 |
3 |
4 |
× |
4 |
3 | |
|
4 |
2 |
3 |
4 |
× |
4 | |
|
5 |
1 |
2 |
3 |
4 |
× |
Условия: обход начинается и заканчивается в п. 3, все пункты должны быть пройдены, в один пункт нельзя заходить дважды. Z max.
1. Граф задачи. Строится прямым ходом по шагам по мере решения функциональных уравнений, исходя из условий задачи (рис. 3.2).
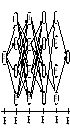
Рис. 3.2
Первый шаг очевиден. Последующие шаги делаются в зависимости от того, какие пункты пройдены.
2. Граф условных оптимумов. Наносятся все дуги (ak–1, ak), приводящие к max Zk, 1 k n (рис. 3.3).
Все max Zk определяются из решения соответствующих функциональных уравнений. После выхода на E5(a5 = 3) обратным ходом находятся все варианты opt пути S(a0, a5), как это делалось в предыдущей задаче (безусловная оптимизация).

Рис. 3.3
3. Функциональные уравнения и их решение. Составляются для каждой вершины ak Ek графа задачи. Результат заносится на граф условных оптимумов, и определяется очередной (k+1)-й шаг для графа задачи в виде перечня дуг (ak, ak+1), исходя из условий задачи.
Z0(a0) = Z0(3) 0.
Z1(a1) = Z0(3) + v1(3, a1) = 0 + v1(3, a1).
Тогда
Z1(1) = v1(3, 1) = 3, a0 = 3;
Z1(2) = v1(3, 2) = 4, a0 = 3;
Z1(4) = v1(3, 4) = 4, a0 = 3;
Z1(5) = v1(3, 5) = 3, a0 = 3.
Наносим эти экстремумы на граф условных оптимумов в виде дуг (a0, a1) и определяем переход на E2, т.е. дуги (a1, a2):
|
a1 a0 |
a2 |
дуги (a1, a2) |
|
1 3 |
2, 4, 5 |
(1, 2), (1, 4), (1, 5) |
|
2 3 |
1, 4, 5 |
(2, 1), (2, 4), (2, 5) |
|
4 3 |
1, 2, 5 |
(4, 1), (4, 2), (4, 5) |
|
5 3 |
1, 2, 4 |
(5, 1), (5, 2), (5, 4) |
Полученные
дуги наносим на граф задачи и производим
шаг 2, т.е. строим
уравнения
![]() Полученные экстремальные дуги (a1,
a2)
наносим на граф условных оптимумов и
определяем переход на E3.
И т.д. до E4.
Таким образом,
для E2
имеем:
Полученные экстремальные дуги (a1,
a2)
наносим на граф условных оптимумов и
определяем переход на E3.
И т.д. до E4.
Таким образом,
для E2
имеем:
![]()
= max (4 + 4, 4 + 2, 3 + 1) = 8, a1 = 2;
![]()
= max (3 + 4, 4 + 3, 3 + 2) = 7, a1 = 1, 4;
![]()
= max (3 + 2, 4 + 3, 3 + 4) = 7, a1 = 2, 5;
![]()
= max (3 + 1, 4 + 2, 4 + 4) = 8, a1 = 4.
Наносим дуги (a1, a2) = (2, 1), (1, 2), (4, 2), (2, 4), (5, 4), (4, 5) на граф условных оптимумов и определяем переход на E3:
|
a2 a1 a0 |
a3 |
дуги (a2, a3) |
|
1 2 3 |
4, 5 |
(1, 4), (1, 5) |
|
2 1 3 |
4, 5 |
(2, 1), (2, 4), (2, 5) |
|
4 3 |
1, 5 | |
|
4 2 3 |
1, 5 |
(4, 1), (4, 2), (4, 5) |
|
5 3 |
1, 2 | |
|
5 4 3 |
1, 2 |
(5, 1), (5, 2) |


Наносим
полученные дуги (a2,
a3)
на граф задачи и производим шаг 3, т.е.
составляем и решаем
уравнения
![]()
![]()
= max (7 + 4, 7 + 2, 8 + 1) = 11, a2 = 2;
![]()
= max (7 + 3, 8 + 2) = 10, a2 = 4, 5;
![]()
= max (8 + 2, 7 + 3) = 10, a2 = 1, 2;
![]()
= max (8 + 1, 7 + 2, 7 + 4) = 11, a2 = 4.
Снова наносим дуги (a2, a3) = (2, 1), (4, 2), (5, 2), (1, 4), (2, 4), (4, 5) на граф условных оптимумов и определяем переход на E4, проверяя условие (3) для каждого варианта:
|
a3 a2 a1 a0 |
a4 |
дуги (a3, a4) |
|
1 2 1 3 |
× |
недопустимо |
|
4 3 |
5 |
(1, 5) |
|
2 4 2 3 |
× |
недопустимо |
|
|
1 |
(2, 1) |
|
5 4 3 |
1 | |
|
4 1 2 3 |
5 |
(4, 5) |
|
2 1 3 |
5 | |
|
4 3 |
× |
недопустимо |
|
5 4 2 3 |
1 |
(5, 1) |
|
5 3 |
× |
недопустимо |
 5
3
5
3

Наносим,
как прежде, полученные дуги (a3,
a4)
на граф задачи и производим шаг 4, т.е.
составляем и решаем уравнения
![]()
![]()
= max (10 + 4, 11 + 1) = 14, a3 = 2;
![]()
= max (11 + 1, 10 + 4) = 14, a3 = 3.
Переход (E4 E5) безусловный, так как возврат в п. 3 происходит при любом состоянии на E4. Поэтому сразу получаем уравнение
![]()
![]()
= max (14 + 3, 14 + 3) = 17, a4 = 1 и 5.
Граф вариантов решений. Является результатом безусловной оптимизации, проведенной на графе условных оптимумов обратным ходом, и строится очевидным образом начиная с a5:
|
|
a0 a1 a2 a3 a4 a5 |
|
× |
3 |
|
(1) |
3 |
|
(2) |
3 → 4 → 5 |
|
(3) |
3 |
|
(4) |
3 |
|
× |
3 → 4 |

 → 2 → 4 → 2 → 1 → 3
→ 2 → 4 → 2 → 1 → 3 → 5
→ 5 → 2 → 1 → 4 → 5
→ 2 → 1 → 4 → 5 → 1 → 2
→ 1 → 2Варианты, не удовлетворяющие условию 3, бракуются. Оставшиеся являются решением задачи:
S (a0, a5) = 3, 5, 4, 2, 1, 3 (1)
= 3, 4, 5, 2, 1, 3 (2)
= 3, 2, 1, 4, 5, 3 (3)
= 3, 1, 2, 4, 5, 3 (4)
Замечания к решению задачи
1. Изменение начала и направления обхода контура маршрута не приводит к изменению значения Fц, так как при этом состав дуг маршрута не меняется. Следовательно, это приводит к эквивалентным решениям в разных вариантах задачи.
Таким
образом, каждый вариант маршрута
порождает 2n
эквивалентных решений, из которых
следует сохранить только одно. Если n
= 5, то получим всего
![]() неэквивалентных решений, некоторые их
них являютсяopt-ми.
неэквивалентных решений, некоторые их
них являютсяopt-ми.
2. Однако разные варианты задачи, отличающиеся началом обхода, могут и не содержать эквивалентных решений из-за невыполнения принципа оптимальности для тех из них, которые обладают свойством последействия. Поэтому полным решением задачи является совокупность всех неэквивалентных решений во всех вариантах задачи.
3. Перенумерация вершин графа с последующей их перестановкой в общем случае не приводит к эквивалентным решениям, так как состав дуг может измениться.
Задача 3. Оптимальное распределение ресурсов.
Модель демонстрирует связь ДП с ИМ. Обозначения оставим прежние:
n – число предприятий;
S – сумма средств (ресурсов), подлежащих распределению;
xk – количество средств, выделяемых k-му предприятию;
k(xk) – показатель эффективности k-го шага (задается).
1. Тогда суммарный показатель эффективности
![]() при
условии:
при
условии:
![]() (тип 2)
(тип 2)
2. Определим Sk – параметр состояния системы на k-м шаге.
Определение I. Пусть Sk – сумма средств, выделенных первым k предприятиям:
![]()
Тогда
Sk = Sk–1 + xk (для обр. хода) (тип 11)
или
Sk
= Sk+1
– xk+1
(для пр. хода)
![]()
(так как Sk–1 = Sk – xk).
Определение II. Пусть Sk – сумма средств, оставшихся после выделения первым k предприятиям:
![]()
Тогда
Sk = Sk–1 – xk (для обр. хода) (тип 12)
или
Sk
= Sk+1
+ xk+1
(для пр. хода)
![]()
(так как Sk–1 = Sk + xk).
3. Задачу теперь можно сформулировать следующим образом: требуется определить n переменных x1, x2,…, xn, удовлетворяющих уравнению состояния и оптимизирующих Z, т.е. Z opt.
4. Введем в рассмотрение суммарный показатель эффективности k-го шага, т.е. переменную Zk:
Zk = Zk(Sk–1, xk) для прямого хода и
Zk = Zk(Sk–1, xk+1) для обратного хода.
Используя уравнение состояний (1) для соответствующего хода, можно записать:
Zk(Sk–1, xk) = Zk(Sk) для прямого хода и
Zk(Sk–1, xk+1) = Zk(Sk) для обратного хода.
Получили однотипную запись для Zk независимо от хода и определения переменной состояния Sk (т.е. так же, как в ИМ).
5. Тогда функциональные уравнения Беллмана будут выглядеть следующим образом:
– для прямого хода:
Z1(S1) = 1(x1), так как Z0 0; (тип 3')
![]() (тип
4')
(тип
4')
– для обратного хода:
Zn–1(Sn–1) = n(xn), так как Zn 0; (тип 3)
![]() (тип
4)
(тип
4)
Замечание. Уравнения Беллмана не зависят от определения переменной состояния Sk.
6. В результате решения уравнений (3, 4) или (3', 4') получаем две последовательности функций: условные оптимумы суммарного показателя эффективности {Zk(Sk)} и условные управления {xk(Sk)} на k-м шаге. При этом opt Z = Zn для прямого хода и opt Z = Z0 для обратного.
Тем самым становятся известными и последовательности Sk, k = 1,…, n при прямом ходе или Sk, k = n – 1,…, 0 при обратном, так как Zk = Zk(Sk), где Sk фиксировано.
7. Безусловная оптимизация: используя обе последовательности Sk и xk(Sk) , записанные в обратном порядке, и соответствующее уравнение состояний и руководствуясь общей вычислительной схемой ДП, т.е. строя последовательность состояний и управлений противоположным ходом, получим значения переменных xk на каждом шаге.
Задача 4. Оптимальное управление запасами.
1. Содержательная постановка задачи.
Планируемый период разделен на n промежутков времени (дни, месяцы и т.д.), в которых задан расход dk, производимый в конце каждого промежутка. Известны также начальный уровень запасов и зависимость суммарных затрат на хранение и пополнение запасов в данном периоде от среднего уровня хранимых запасов и их пополнения. Требуется определить размеры пополнения запасов в каждом промежутке времени для удовлетворения заданного расхода из условия минимума суммарных затрат за весь период.
2. Введем обозначения. Пусть n – число промежутков времени,
uk – размер пополнения запасов в k-м промежутке (переменная управления),
Sk–1 – уровень запаса в начале k-го промежутка, т.е. после расхода в (k – 1)-м (переменная состояния),
S0 – начальный уровень запасов (задано),
dk – расход в k-м промежутке (задано).
И
пусть
![]() затраты
вk-м
промежутке, где
затраты
вk-м
промежутке, где
![]() средний
уровень запаса.
средний
уровень запаса.
Если
![]()
Тогда суммарные затраты выразятся формулой:
![]() (тип
2')
(тип
2')
А уравнение состояния (балансовое уравнение) запишется в виде:
Sk = Sk–1 + uk – dk (тип 1')
(или Sk–1 = Sk – uk + dk) – для прямого хода.
Напомним, что Sk – уровень запаса в конце k-го промежутка.
Ограничения: Sk 0, uk 0.
Задача теперь приобретает стандартную формулировку: требуется определить n переменных u1, u2,…, un , удовлетворяющих (1') и минимизирующих (2').
3. Функциональные уравнения:
![]() (тип
3')
(тип
3')
или
= f1 (S0, u1),
если S0 – единственно;
![]() (тип
4')
(тип
4')
Остается определить допустимые пределы изменения uk. Из ограничений и уравнения состояний (1') следует:
Sk–1 = Sk – uk + dk 0,
откуда
uk Sk + dk.
Таким образом, 0 uk Sk + dk.
Замечание. Задача не имеет обратного хода, так как конечное состояние Sn заранее не известно.
4. В результате решения функциональных уравнений получим последовательно все условные оптимумы Zk и условные управления uk для каждого шага:
{Z1(S1), u1(S1)},…, {Zn(Sn), un(Sn)}.
При этом min Z = Zn(Sn). Так как Sn фиксировано, un = un(Sn) становится известным. Теперь можно последовательно обратным ходом провести безусловную оптимизацию и определить значения всех uk:
![]()
![]()
……………………………
![]()
В результате получим вектор оптимальных значений u1, u2,…, un , который минимизирует Z, а значит, является решением задачи.
Задача 5. Задача «о замене оборудования».
1. Задано: начальная стоимость оборудования, стоимость произведенной продукции на этом оборудовании, ежегодные затраты на эксплуатацию оборудования, ликвидная стоимость.
Определить оптимальные сроки замены оборудования в течение n лет, при которых прибыль от эксплуатации оборудования была бы максимальной.
2. Введем обозначения. Пусть n – период эксплуатации,
t0 – возраст оборудования в начале планового периода (задано),
t – возраст оборудования в течение планового периода,
p – начальная стоимость оборудования,
f(t) – стоимость произведенной продукции на оборудовании возраста t лет,
r(t) – ежегодные затраты на эксплуатацию оборудования возраста t лет,
(t) – ликвидная стоимость оборудования возраста t лет.
Замечание. Отсутствует единый показатель эффективности k-го шага. Поэтому суммарный показатель эффективности Z нельзя выразить формулой, единой для всех шагов.
3. Пусть k-й шаг есть номер k-го года. Тогда для k-го шага t = = 0, 1, 2,…, k – 1; т.е. t k – 1. А состояние системы в начале k-го шага Sk–1 = t, t = 0, 1, 2,…, k – 1.
Если управление на k-м шаге
![]()
то уравнение состояния тогда запишется в виде:
![]() (тип
1)
(тип
1)
4. Пусть Z(t0 + t) – прибыль от эксплуатации оборудования в течение t лет. При отсутствии определения Z задачу можно сформулировать неформально следующим образом: требуется определить оптимальные сроки замены оборудования в течение n лет при условии Z = max (т.е. определить точку замены на шкале t).
5. Поскольку здесь нет показателя эффективности k-го шага fk, нельзя выразить Z как суммарную величину через fk. Однако суммарный показатель эффективности для k-го шага Zk можно выразить через f(t), r(t) и (t) в зависимости от управления на каждом шаге.
Положим t0 = 0, тогда функциональное уравнение для n-го шага (при обратном ходе) запишется в виде:
![]() (тип
3)
(тип
3)
Сравнив эти две величины для всех t > n, получим условный оптимум Zn (t) и условное управление un (t).
Предположим, что для всех значений Sk = t известна максимальная прибыль Zk+1 (Sk), полученная за (n – k) шагов с (k + 1)-го по n-й включительно. Тогда функциональное уравнение для k-го шага запишется в виде:
![]() (тип
4)
(тип
4)
где Zk+1 – условная оптимальная прибыль за (n – k) шагов, если к началу (k + 1)-го шага Sk = 1 или Sk = Sk–1 + 1 = t + 1 по (1).
В результате решения этих уравнений получаем, как всегда, две последовательности функций: условных оптимумов Zk (t) и условных управлений uk(t) для каждого k-го шага. При этом для S0 = t0 имеем:
max Z = Z1(t0 + t) = Z1(t0),
так как t = 0 по определению.
6. Безусловная оптимизация заключается в выборе из множества {uk(t)} только безусловных управлений. По обратной цепочке (т.е. прямым ходом) с помощью уравнения (1) получим:
u1 = u1(t0), из (1) (S1 = t1);
u2 = u2(t0), из (1) (S2 = t2);
……………………………..
un = un(tn–1),
где tk – фиксированное значение t в зависимости от uk; tk = t0 + k, k, k – 1,…, 1 .
Решением задачи является оптимальное управление U = (u1, u2,…, un), представляющее собой набор двузначных переменных uk = = uc, uз.
Замечание. В принципе число вариантов управления, т.е. число значений uk, может быть более двух, что не меняет существа модели.