

9.Основные неизвестные метода перемещений.
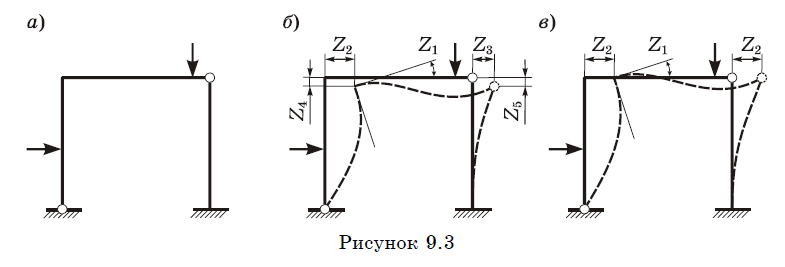
За основные неизвестные метода перемещений примем угловые и линейные перемещения узлов системы. Будем обозначать их символом Z независимо от типа.
Кинематически определимой называется система, у которой все перемещения узлов определены, либо отсутствуют.
Каждый
шарнирный узел
системы может получать линейное смещение,
определяемое на плоскости двумя
компонентами - вертикальным и
горизонтальным перемещениями Z1
и Z2
(рисунок
9.1, а).

Каждый жесткий узел, помимо линейного смещения, может еще и поворачиваться на угол
Z3 (рисунок 9.1, б).
В зависимости от расчетной схемы конструкции одно или оба линейных перемещения могут отсутствовать.
Степень кинематической неопределимости. Минимальное число тех неизвестных перемещений узлов, знание которых позволяет установить деформированный вид системы (а, следовательно, затем и усилия в ее элементах) называется степенью кинематической неопределимости.
Для плоской стержневой системы степень кинематической неопределимости можно вычислить по формуле:

где nу, nл - количество независимых угловых и линейных перемещений узлов.
Значение nу равно числу жестких узлов системы.
Величина nл зависит от принятых допущений о характере деформирования стержневой конструкции. В общем случае ее можно определить как количество дополнительных стерженьков (одиночных связей), которые необходимо установить для полной ликвидации линейных смещений узлов.
Допущения метода перемещений. Стержневые системы, к расчету которых предполагается применять метод перемещений, считаются линейно деформируемыми. Для них сохраняются все гипотезы, принятые ранее.
Для сооружений, в которых перемещения обусловлены преимущественно изгибными деформациями (рам и балок), вводятся дополнительные допущения.
Допущение
1. При изгибе прямого стержня сближением
его концов можно пренебречь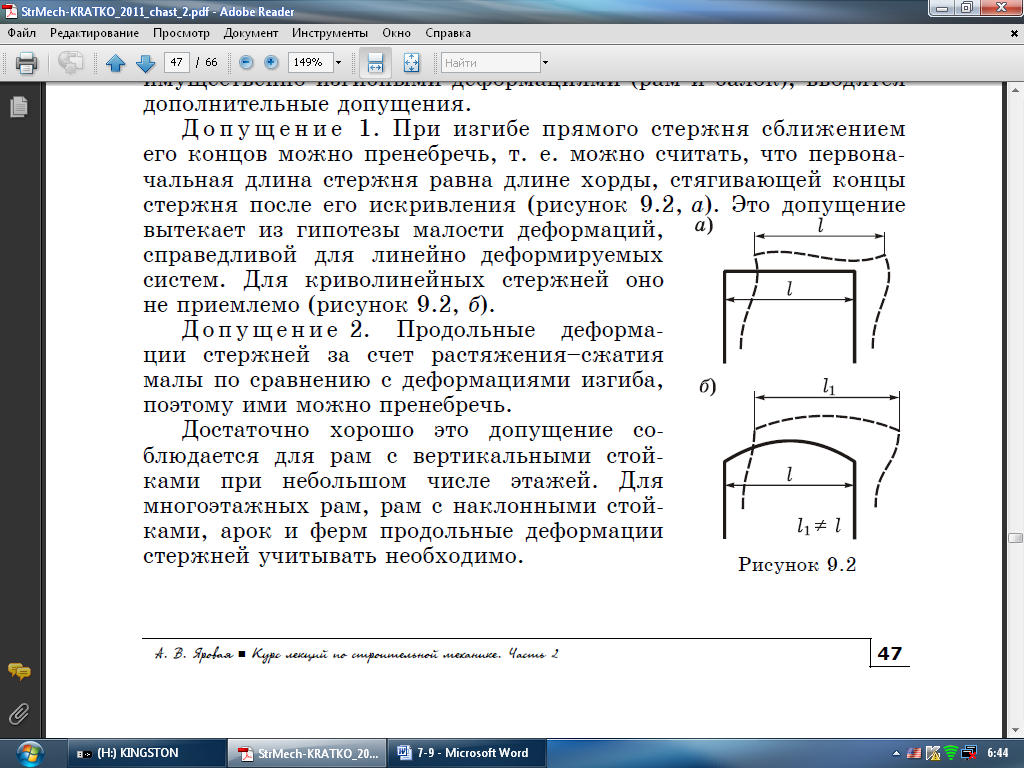
Допущение 2. Продольные деформации стержней за счет растяжения-сжатия малы по сравнению с деформациями изгиба, поэтому ими можно пренебречь.
Если оба допущения справедливы, то количество независимых линейных перемещений пл можно установить как число степеней
свободы шарнирной схемы WmapH, полученной из заданной системы введением полных шарниров во все узлы, включая и опорные; при этом все консоли, если они есть, должны быть отброшены:

Для определения числа степеней свободы шарнирной схемы удобно использовать формулы (1.4) и (1.5):
Wшарн = (2У - С0 )шарн ; Wшарн = (Ш - 3К)шарн ,
где У - количество шарнирных узлов, непосредственно не связанных с землей; С0 - количество одиночных связей (стержней шарнирной схемы и опорных стержней); Ш - количество шарниров (с учетом кратности), К - количество замкнутых контуров.
10. Основная система метода перемещений. Типы дополнительных связей, цель их введения, типы реакций в них.
При расчете конструкций методом сил отбрасывались лишние связи, и образовывалась статически определимая основная система, в которой возможно построение эпюр от нагрузки и единичных усилий.
В методе перемещений заданная система также преобразуется, но не в статически, а в кинематически определимую. Для этого вводятся дополнительные связи, устраняющие угловые и линейные перемещения узлов.
Эти связи можно разделить на два вида:
плавающие заделки (защемления), которые накладываются на все жесткие узлы;
одиночные стержни, которые устанавливаются по направлениям возможных линейных смещений узлов.
Если число дополнительных связей совпадает со степенью кинематической неопределимости сооружения, и все они введены правильно, то все узлы станут неподвижными. В заданной же системе узлы смещаются. Поэтому наложение связей на конструкцию необходимо компенсировать дополнительными внешними воздействиями: ее узлам следует придать такие же перемещения, которые имелись изначально. Полученная таким образом система представляет собой основную систему метода перемещений
Например, для рамы, показанной на рисунке 9.3, а, основная система получается следующим образом: в жесткий узел вводится плавающая заделка (связь 1), которой придается поворот на угол Z1, а также узлы рамы закрепляются горизонтальным стержнем (связь 2), который принудительно смещается на Z2 (рисунок 9.6, а). Заданная и основная системы эквивалентны: их деформированное состояние, а, следовательно, и внутренние усилия одинаковы.
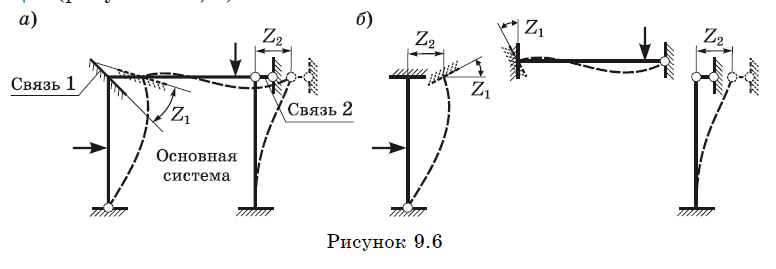
Плавающие заделки накладываются на все жесткие узлы системы, опорные стержни устанавливаются по всем направлениям независимых линейных смещений узлов. Следовательно, основная система метода перемещений может быть по существу сформирована единственным образом. Напомним, что в методе сил можно было предложить множество вариантов.

Таблицы реакций и внутренних усилий в стержне как элементе основной системы. Основная система может рассматриваться как совокупность отдельных стержней, объединенных в узлах. Эти стержни можно разделить на четыре типа (рисунок 9.8):
Тип
1 Тип 2 Тип 3 Тип 4
«заделка-шарнир»
«заделка-заделка» «шарнир-шарнир» консоль
Рисунок 9.8
Каждый из них может быть заранее рассчитан на действие различных нагрузок, изменение температуры и смещение опор. В статически неопределимых стержнях (тип 1 и 2) внутренние усилия удобно находить методом сил, в статически определимых (тип 3 и 4) - с помощью уравнений равновесия.
Для наиболее распространенных видов воздействий расчеты отдельных стержней постоянного сечения уже выполнены, их результаты сведены в справочные таблицы