

2.7 Алгоритмическая реализация аср
Виртуальная структура многоцелевого многоканального Ремиконта Р-380 и полевого малоканального Ремиконта Р-390 одинакова и состоит из двух основных компонентов:
• алгоритмических блоков (алгоблоков)
• библиотеки алгоритмов
Алгоблок – это «контейнер», в который пользователь может поместить любой библиотечный алгоритм, причем каждый такой алгоритм можно использовать многократно. В одном контроллере можно задействовать до 1500 алгоблоков.
Библиотека алгоритмов контроллера насчитывает более 100 алгоритмов, каждый из которых специализирован под задачи автоматизации производственных процессов. В состав библиотеки наряду с простыми алгоритмами (суммирование, логическое объединение, сравнение и т.п.) входят более сложные алгоритмы, такие как регуляторы, логические шаговые программы, алгоритмы управления задвижками, двигателями, клапанами, а также алгоритмы обмена данными между контроллерами и рабочими станциями. В общей сложности в библиотеке реализовано более 500 различных функций, образующих типовые технологические «связки».

Рис.2.10.Виртуальная структура Ремиконта.
Библиотека алгоритмов содержит не только алгоритмы управления тепломеханическим, но и электрическим оборудованием. К последним, в частности, относятся алгоритмы управления электрическими выключателями
и регуляторами напряжения под нагрузкой, алгоритмы безопасного контроля переносных заземлений и подсчета выработанной или потребленной электроэнергии и т.п.
Главный алгоритм управляющий схемой регулирования РОВ является регулятор РАН (регулятор аналоговый) сходный по структуре, но работающий по импульсной логике РИМ (регулятор импульсный). Окно импульсного регулятора, с которым работает оператор представлено на рис. 3.18.
Рассмотрим алгоритм работы, входные и выходные величины регулятор РАН.
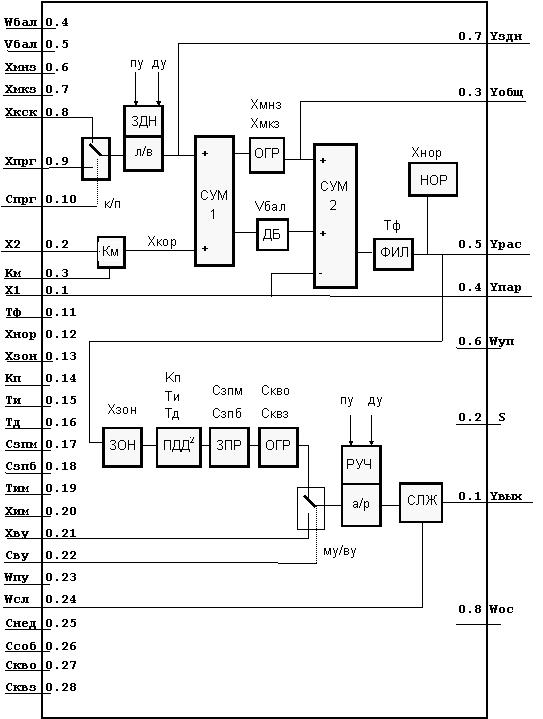

Рис.2.12.
Алгоритм
РАН.
л/в - режим задания локальный/внешний (каскадный или программный)
к/п - режим задания каскадный/программный
а/р - режим управления автоматический/ручной
му/ву - режим управления местный/внешний
Таблица 2.3 Параметры алгоритма.
Наименование |
Обознач. |
Номер |
Нач. знач. |
Назначение |
Входы |
X1 |
0.1 |
0 |
Регулируемый параметр |
X2 |
0.2 |
0 |
Сигнал коррекции |
|
Kм |
0.3 |
1 |
Масштабный коэффициент |
|
Wбал |
0.4 |
0 |
Вариант балансировки |
|
Vбал |
0.5 |
10 %/с |
Скорость динамической балансировки |
|
Xмнз |
0.6 |
-100 |
Ограничение задания минимум |
|
Xмкз |
0.7 |
100 |
Ограничение задания максимум |
|
Xкск |
0.8 |
0 |
Сигнал каскадного задания |
|
Xпрг |
0.9 |
0 |
Сигнал программного задания |
|
Cпрг |
0.10 |
0 |
Команда программного задания |
|
Tф |
0.11 |
0 |
Время фильтра |
|
Xнор |
0.12 |
100 |
Порог нуль-органа |
|
Xзон |
0.13 |
0,5 |
Зона нечувствительности |
|
Кп |
0.14 |
1 |
Коэффициент пропорциональности |
|
Tи |
0.15 |
10 с |
Время интегрирования |
|
Tд |
0.16 |
0 |
Время дифференцирования |
|
Cзпм |
0.17 |
0 |
Запрет меньше |
|
Cзпб |
0.18 |
0 |
Запрет больше |
|
Xмин |
0.19 |
-100 |
Ограничение выхода минимум |
|
Xмкс |
0.20 |
100 |
Ограничение выхода максимум |
|
Xву |
0.21 |
0 |
Сигнал внешнего управления |
|
Cву |
0.22 |
0 |
Команда внешнего управления |
|
Wпу |
0.23 |
0 |
Команды пультового управления |
|
Wсл |
0.24 |
0 |
Вход слежения |
|
Cнед |
0.25 |
0 |
Признак недостоверности |
|
Cсоб |
0.26 |
1 |
Обработка ошибок и событий |
|
Выходы |
Yвых |
0.1 |
0 |
Выходной сигнал |
S |
0.2 |
- |
Статус |
|
d1 |
1 |
- |
недостоверность |
|
d2 |
2 |
1 |
режим автоматический/ручной |
|
d3 |
3 |
- |
управление местное/внешнее |
|
d4 |
4 |
- |
режим слежения |
|
d5 |
5 |
1 |
состояние отключения |
|
d6 |
6 |
- |
состояние запрета меньше |
|
d7 |
7 |
- |
состояние запрета больше |
|
d8 |
8 |
- |
|Yрас| ≥ Xнор |
|
d9 |
9 |
- |
|Yрас| > Xзон / 2 |
|
d10 |
10 |
0 |
режим локальный/внешний |
|
d11 |
11 |
- |
режим каскадный/программный |
|
d12 |
12 |
1 |
состояние каскадной блокировки |
|
d13 |
13 |
- |
процедура статической балансировки |
|
d14 |
14 |
- |
процедура динамической балансировки |
|
d15 |
15 |
- |
ограничение задания меньше |
|
d16 |
16 |
- |
ограничение задания больше |
|
Yобщ |
0.3 |
- |
Общее задание |
|
Yпар |
0.4 |
- |
Регулируемый параметр |
|
Yрас |
0.5 |
- |
Рассогласование |
|
Wуп |
0.6 |
- |
Упакованные сигналы |
|
d1 |
1 |
- |
ограничение выхода минимум |
|
d2 |
2 |
- |
ограничение выхода максимум |
|
d5 |
5 |
- |
разрешение внешнего задания |
|
Yздн |
0.7 |
0 |
Локальное задание |
|
Wос |
0.8 |
- |
Выход обратного счета |
Регулятор аналоговый предназначен для управления по ПИД закону регулирования пропорциональным исполнительным механизмом. Он может выполнять также функций корректирующего регулятора в каскадных схемах регулирования, формируя задание подчиненному аналоговому или импульсному регулятору.
Алгоритм РАН является объектным и формирует информацию, относящуюся к объекту "Аналоговый регулятор". Кроме того, данный алгоритм является каскадным.
В регуляторе выполняются следующие основные функции:
формирование сигнала задания
выделение сигнала рассогласования
формирование управляющего воздействия
Регулятор может работать в различных режимах работы, причем переключение этих режимов выполняется безударно.
На вход регулятора могут подаваться два аналоговых сигнала - не масштабируемый сигнал регулируемого параметра и масштабируемый сигнал коррекции.
На выходе регулятора помимо выходного сигнала Yвых формируется ряд дополнительных сигналов (статус S, сигнал задания Yздн, сигнал рассогласования Yрас и т.д.).
Аналоговый регулятор относится к категории каскадных алгоритмов. С помощью специального входа Xкск и выхода Yвых регулятор включается в цепочку каскадных алгоритмов, которая может синхронно и безударно включаться и отключаться путем перехода в режим слежения. Для организации слежения регулятор имеет специальный вход слежения Wсл и выход обратного счета Wос.
Все выходные сигналы алгоритма могут запрашиваться по объектным командам оперативного управления. С помощью этих команд могут также изменяться оперативные параметры регулятора.
КРОСС-СРЕДСТВА
В состав кросс-средств Р-380 входят клеммно-модульные соединители (КМС) и силовые преобразователи (СПР). Их основное назначение – подключение физических цепей каналов ввода/вывода к модулям УСО.
СПР, помимо коммутации, обеспечивают прямое и обратное преобразование дискретных сигналов ~\=220 В в сигналы =24 В, с которыми работает Р-380. Один КМС или СПР подключает одну группу каналов модуля УСО. К одному контакту КМС или СПР можно подключить провод с максимальным сечением 2,5 мм2. Подключение обеспечивается «под винт». К кросс-средствам относятся также специальные соединители (системные КМС).
Таблица 2.3. Используемые типы КМС для схемы регулирования температуры перегретого пара.
Тип канала |
Кросс-средство |
Модуль |
||
Тип |
Назначение подключения |
К-во каналов |
||
Аналоговый ввод |
КМС-874
|
Унифицированные токовые сигналы с автономным питанием датчиков |
8 |
АЦП-80
|
Аналоговый вывод |
КМС-879 |
Унифицированные токовые сигналы на ВПЧА |
8 |
ЦАП-80
|
Импульсный вывод |
КМС-877 |
Импульсные сигналы (ШИМ) на МЭО |
10 |
ЦИП-80 |