

Шейпак А.А. Гидравлика и гидропневмопривод (часть 2)
.pdf4) Построение характеристики трубопровода и определение рабочей точки гидросистемы
Подставив данные из условия задачи, получим:
∆pц = 4,07МПа; |
K1 =390 106 кг (м4 с); |
K2 =586 106 кг (м4 с); |
K3 =32,7 1012 кг м7 . |
Так как характеристика трубопровода нелинейна, то для ее построения необходимо не менее 5 точек в рабочем диапазоне значений расходов. Результаты расчета рекомендуется свести в таблицу (табл. 9.1).
|
Результаты расчета характеристики трубопровода |
Таблица 9.1 |
|||||
|
|
|
|||||
|
|
|
|
|
|
|
|
Q [м3/с] |
|
0 |
50 10-6 |
100 10-6 |
150 10-6 |
|
200 10-6 |
∆pΣ [МПа] |
|
4,07 |
4,13 |
4,41 |
4,86 |
|
5,47 |
|
|
|
|
|
|
|
|
По этим данным строится характеристика трубопровода (кривая 3 на рис. 9.7). Точка пересечения линии 3 с СD дает рабочую точку гидросис-
темы (точка R). Ее координаты: Qну =176,3см3 с и pн =5,16МПа.
с и pн =5,16МПа.
5) Определение искомых величин
Так как вся подача насосной установки Qну поступает в гидроцилиндр, то скорость движения его штока определяется из формуле (5.15) (в соответствии с рекомендациями принимаем объемный КПД гидроцилиндра равным единице)
Vп = 4π QDну2 =8,98см с.
Мощность, потребляемая гидроприводом, равна мощности, потребляемой насосной установкой, и в данном случае определяется по формуле
(9.5):
Nвх = |
pн Qт |
=1393Вт. |
|
||
|
ηмн |
|
Для определения КПД гидропривода ηгп вначале необходимо рассчитать полезную мощность, развиваемую на его выходном звене
Nвых = F Vп = 718Вт.
Тогда
ηгп = Nвых = 0,516.
Nвх
261
9.6.2.Гидропривод вращательного движения
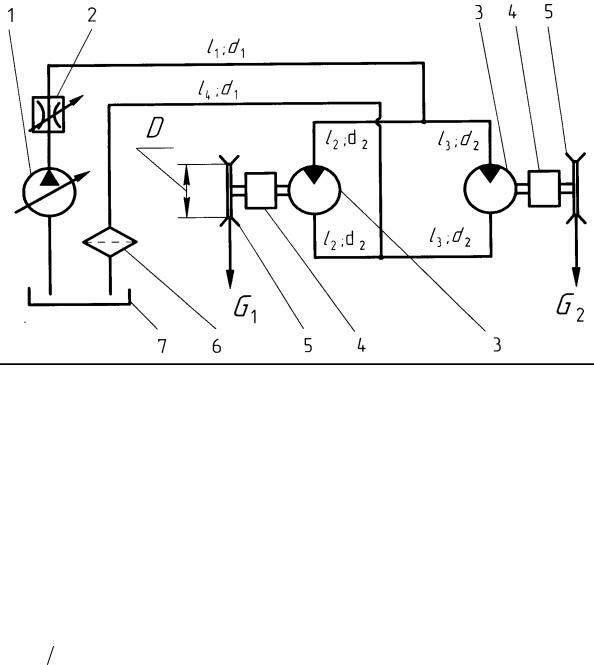
Вгидроприводе, упрощенная схема которого представлена на рис. 9.8, регулируемый насос 1 подает рабочую жидкость через дроссель 2 к двум гидромоторам 3, а от них через фильтр 6 обратно в гидробак 7. Выходные валы гидромоторов через механические редукторы 4 связаны со шкивами
5.На шкивы наматываются тросы, к которым приложены нагрузки G1 и G2.
Рис. 9.8. Схема гидропривода вращательного движения
Дано: вес грузов G1 = 2,2 кН и G2 = 2,1 кН; параметры насоса: максимальный рабочий объем Wон = 30 см3, частота вращения вала nн = 25 об/с, объемный КПД ηон = 0,82 при давлении р' = 6 МПа, механи-
ческий |
|
КПД |
ηмн = 0,9; параметры регулятора подачи: давление настройки |
||
pр |
= |
4,85 |
МПа, Kр |
= 0,001 м3/(МПа·с); размеры гидролиний: |
|
d1 |
= d2 = 0,8 см, l1 = 5 м, l2 = l3 = 8,5 м, l4 = 3 м; коэффициент сопротивления |
||||
фильтра |
ζф = 5; параметры гидродросселя: площадь проходного сечения |
||||
Sдр = 14 мм2, коэффициент расхода µдр = 0,7; параметры гидромоторов: ра- |
|||||
бочий объем Wг = 32 см3, механический КПД ηмг = 0,9, объемный КПД |
|||||
принять |
ηог |
= 0,99; |
передаточное число механического редуктора |
||
i = nвх |
nвых = 40, диаметр шкива D = 0,5 м; параметры рабочей жидкости: |
||||
кинематическая вязкость ν = 0,14 см2/с, плотность ρ = 900 кг/м3. Принять, что в трубах с диаметром d1 режим течения турбулентный и λ = 0,04, а с диаметром d2 – ламинарный.
262

Требуется определить:
–скорости движения тросов грузов;
–мощность, потребляемую гидроприводом;
–коэффициент полезного действия гидропривода.
Решение
1) Замена принципиальной схемы гидропривода эквивалентной
На рис. 9.9 приведена эквивалентная, или расчетная, схема, полученная на основании принципиальной схемы гидропривода (см. рис. 9.8).
Из анализа расчетной схемы ясно, что рассматриваемый гидропривод представляет собой сложный трубопровод с последовательно-параллель- ным соединением отдельных участков. Его целесообразно разбить на 4 простых трубопровода: 1, 2, 3 и 4 (рис.9.9).
Рис. 9.9. Эквивалентная схема
2) Построение характеристики насосной установки
Учитывая линейность характеристик насоса и насосной установки с регулятором подачи, построение каждой из них проводим по двум точкам в соответствии с вышеизложенной методикой.
Длянасоса: перваяточкаА– при p = 0 , Qтmax =Woн nн = 0,75 10−3 м3 с; вторая точка B – при p′ = 6МПа, Q′ =Qтmax ηон = 0,615 10−3 м3
с; вторая точка B – при p′ = 6МПа, Q′ =Qтmax ηон = 0,615 10−3 м3 с. Соединяя точки А и B, получаем характеристику насоса (рис. 9.10). Для насосной установки с регулятором подачи:
с. Соединяя точки А и B, получаем характеристику насоса (рис. 9.10). Для насосной установки с регулятором подачи:
первая точка C – это точка пересечения горизонтали, соответствую-
щей давлению настройки регулятора pр = 4,85 |
МПа, с характеристикой на- |
||||||||
соса. Подача насосной установки при этом равна Q′ну = 0,65·10-3 м3/с; |
|||||||||
Q′ну |
вторая точка C' – ее координаты определяются по формуле (5.11), зная |
||||||||
и произвольно |
|
задаваясь |
давлением |
на |
выходе насоса, при |
||||
′′ |
′′ |
′ |
′′ |
− pр )= 0,25 |
10 |
−3 |
м |
3 |
с. |
pн =5,25МПа, Qну =Qну − Kр (pн |
|
|
|||||||
263

Проведя прямую через точки C и C' до пересечения с осью ординат в точке D, получаем характеристику насосной установки (ломаная линия
АСD на рис. 9.10).
3) Составление уравнений характеристик простых трубопроводов
Составление уравнений характеристик простых трубопроводов 1, 2, 3 и 4 базируется на заданном условии: на участках 1 и 4 – режим течения
турбулентный, а на участках 2 и 3 – ламинарный. Отсюда: |
|
|
|
|
||||||||||||||||||||||||||||
для 1: ∆p = ∆p |
тр1 |
+ ∆p |
|
= λ |
|
8 l1 ρ |
Q2 |
+ |
|
|
|
|
ρ |
|
|
|
Q2 |
= K |
|
|
Q2 ; |
|||||||||||
|
|
|
|
|
|
2 µ2 |
S |
|
|
|
|
|||||||||||||||||||||
|
1 |
|
|
|
|
|
др |
|
|
|
π2 d 5 |
|
2 |
|
|
|
|
1 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
др |
др |
|
|
|
|
|
|
|
|||
для 2: ∆p2 |
= 2 ∆pтр |
|
+ ∆pг1 = |
2 |
128 ν l2 ρ |
Q + |
2 π M1 |
|
= K2 Q + ∆pг1 ; |
|||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
π d 42 |
|
|
|
|
|
|
Vг ηмг |
|
|
|
|
|
||||||
для 3: ∆p3 |
= 2 ∆pтр |
|
+ ∆pг2 = |
2 |
|
128 ν l3 ρ |
Q + |
2 π M 2 |
= K3 Q + ∆pг2 ; |
|||||||||||||||||||||||
|
|
|
Vг ηмг |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
π d 42 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
для 4: ∆p |
4 |
= ∆p |
тр4 |
+ ∆p |
ф |
= λ |
8 l4 ρ |
Q2 |
+ ζ |
ф |
|
8 ρ |
|
|
Q2 |
= K |
4 |
Q2 . |
||||||||||||||
|
π2 |
d |
4 |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
π2 d 5 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
В этих уравнениях значение моментов на валах гидромоторов M1 и M2 определяются с учетом передаточных отношений редукторов
M1 |
= |
G1 D |
и |
M 2 |
= |
G2 D |
. |
2 i |
|
||||||
|
|
|
|
|
2 i |
||
4) Построение суммарной характеристики сложного трубопровода и определение рабочей точки гидросистемы
Заметим, что участки 1 и 4 включены последовательно, поэтому для них можно написать общее уравнение
∆p1+4 = ∆p1 + ∆p4 = (K1 + K4 ) Q2 = K1+4 Q2
и сразу построить их суммарную характеристику. Подставив данные из условия задачи, получим:
|
|
∆pг1 = 3,2 МПа; |
с); |
∆pг2 = 3,05 МПа; |
||||||
K |
2 |
= K |
3 |
= 2,13 109 |
кг (м4 |
K + |
4 |
=12,7 1012 |
кг м7 . |
|
|
|
|
|
|
1 |
|
|
|||
264

Рис. 9.10. Графическое решение
Поскольку характеристики 2 и 3 трубопроводов линейны, для их построения достаточно двух точек, а для построения нелинейной характеристики ∆p1+4 = f (Q) используем 6 точек. Результаты расчетов заносим
в таблицу 9.2.
Таблица 9.2
Результаты расчета характеристик трубопровода
Q [м3/с] |
0 |
0,2 10-3 |
0,3 10-3 |
0,4 10-3 |
0,5 10-3 |
0,6 10-3 |
||
∆p2 |
[МПа] |
3,2 |
|
|
|
4,27 |
|
|
∆p3 |
[МПа] |
3,05 |
|
|
|
4,12 |
|
|
∆p1,4 |
0 |
0,51 |
1,14 |
2,03 |
3,18 |
4,57 |
||
[МПа] |
||||||||
|
|
|
|
|
|
|||
По данным таблицы на графике (см. рис. 9.10) строим характеристики каждого простого трубопровода (линии 1+4, 2 и 3). Затем по правилам графического сложения характеристик параллельных участков (они складываются за счет суммирования отрезков вдоль оси расходов) получаем суммарную характеристику участков 2 и 3 (ломаная линия 2+3). Далее проводим графическое сложение полученной характеристики
265

∆p2+3 = f (Q) с характеристикой ∆p1+4 = f (Q). Эти характеристики скла-
дываются по правилу сложения характеристик последовательно соединенных трубопроводов, т.е. за счет суммирования отрезков вдоль оси давлений. В результате получаем суммарную характеристику всего сложного трубопровода (линия Σ).
Заметим, что при сложении линейных зависимостей достаточно провести сложение по двум точкам, а при сложении характеристик, когда хотя бы одна из них нелинейна, необходимо не менее 4…5 точек.
Пересечение полученной характеристики сложного трубопровода с характеристикой насосной установки определяет рабочую точку гидросистемы (точка R на рис.9.10). Ее координаты pн = 5,14 МПа и
Qну = 0,358 10-3 м3/с.
5) Определение искомых величин
Потребляемую гидроприводом мощность определим по методике изложенной в подразделе 9.4, для регулируемого насоса с регулятором подачи. Для этого через точку R проводим прямую параллельно АВ и определя-
ем Q′т = 0,474·10-3 м3/с. Тогда
Nвх = |
pн Qт′ |
= 2,43 103 Вт. |
|
||
|
ηмн |
|
Чтобы определить скорости подъема грузов и КПД гидропривода, необходимо найти частоту вращения вала каждого гидромотора. Для этого необходимо знать величины расходов Q2 и Q3 в параллельных трубопроводах 2 и 3.
Эту задачу можно решить графически, исходя из того, что при наличии графической зависимости p = f (Q) по одной из известных координат
легко определяется другая.
Опустив вертикаль из точки R, соответствующую подаче насосной установки Qну, находим точку R1 пересечения этой вертикали с кривой 2+3 и, следовательно, потерю давления ∆p2+3 на участке параллельного
соединения, где ∆p2+3 = ∆p2 = ∆p3.
Проведя теперь горизонталь через точку R1, соответствующую потерям давления ∆p2 = ∆p3, находим точки ее пересечения с характеристиками 2-го и 3-го трубопроводов (соответственно, точки R2 и R3). Опус-
тив вертикали из точек R2 и R3, находим расходы Q2 = 0,144 10-3 м3/с и
Q3 = 0,214 10-3 м3/с.
По известным расходам Q2 и Q3 с учетом передаточного отношения i механического редуктора и диаметра D шкива определяем скорости подъема левого V1 и правого V2 грузов. При этом целесообразно использовать формулу
V= π D ω= π D Q ηог .
ii Wг
266

Отсюда, подставив соответствующие значения, получим:
V1 = 0,161м с, V2 = 0,240м
с, V2 = 0,240м с.
с.
Полезная мощность, развиваемая гидроприводом, складывается из мощностей, затрачиваемых на подъем обоих грузов:
Nвых =G1 V1 + G2 V2 = 0,858кВт.
Тогда коэффициент полезного действия гидропривода равен
ηгп = |
Nвх |
= 0,353. |
|
||
|
Nвых |
|
9.7. Основы динамического расчета объемного гидропривода
При проектировании ряда гидроприводов, особенно работающих с переменными нагрузками и в режиме «пуск-остановка», возникает необходимость анализа динамики гидравлических механизмов, т.е. их способности обеспечить выполнение задач при неустановившихся процессах в гидросистеме. При проведении динамических расчетов гидропривода (математическое моделирование) решаются достаточно сложные и трудоемкие задачи. Решение их обычно проводят численными методами с использованием ЭВМ. Не менее сложным является постановка задачи на математическое моделирование, т.е. перевод физических процессов, происходящих в гидроприводе, в математические зависимости. В данном подразделе будет изложена одна из возможных методик, позволяющая провести математическое моделирование работы гидропривода.
При проведении динамического расчета прежде всего необходимо получить уравнения его составных частей. Рассмотрим получение этих зависимостей для наиболее важных элементов гидропривода.
Первой их таких составных частей является трубопровод. Пусть жидкость плотностью ρ движется по горизонтальному трубопроводу длиной l и постоянной площадью поперечного сечения Sтр (рис. 9.11,а). Будем считать, что в данном трубопроводе существуют потери давления (местные и потери на трение), суммарную величину которых обозначим ∆pΣ. Величина ∆pΣ определяется зависимостью (9.13). С учетом принятых обозначений запишем уравнение Бернулли для начального 1-1 и конечного 2-2 сечений трубопровода при неустановившемся течении жидкости:
ρp1g = ρp2g + ρ∆pΣg + dVdt gl .
Последнее слагаемое в уравнении принято называть инерционным напором.
Записанное уравнение целесообразно привести к более удобному виду. Для этого каждое слагаемое уравнения умножим на площадь поперечного сечения трубопровода Sтр, ускорение свободного падения g и поделим на длину l. Затем перепишем уравнение таким образом, чтобы все слагаемые с давлениями были записаны справа, а слагаемое со скоростью – слева.
267
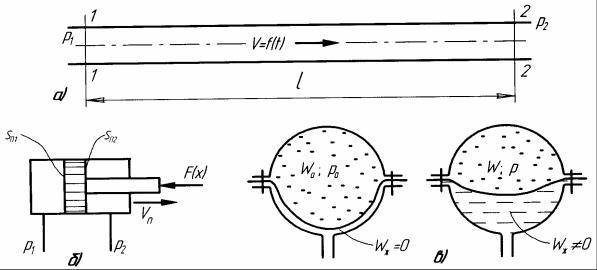
Рис. 9.11. Расчетные схемы элементов гидропривода: а) трубопровод; б) гидроцилиндр; в) гидроаккумулятор
Тогда
d(V Sтр) |
= |
Sтр |
p1− |
Sтр |
p2 − |
Sтр |
∆pΣ . |
|
dt |
ρ l |
ρ l |
ρ l |
|||||
|
|
|
|
Имея в виду, что Q =V Sтр и введя коэффициент k = Sтр/(ρ g) , учи-
тывающий инерцию жидкости в трубопроводе, окончательно получим дифференциальное уравнение трубопровода:
dQ |
= k p1−k p2 −k ∆pΣ . |
(9.15) |
dt |
|
|
Одним из важнейших элементов гидропривода является гидродвигатель. Учитывая, что при расчетах наибольшие сложности возникают с гидродвигателями возвратно-поступательного движения, получим математические зависимости для моделирования работы гидроцилиндра.
Пусть поршень массой m движется вправо, преодолевая силу на штоке F (рис. 9.11,б). Причем, в общем случае, эта сила переменна по ходу поршня, т.е. F = F(x) . Давление p1 в левой полости гидроцилиндра действует на
площадь поршня Sп1, давление p2 в левой полости – на кольцевую площадь Sп2. Пренебрегая потерями на трение, запишем уравнение равновесия поршня при неустановившемся движении:
p S |
п1 |
− p |
2 |
S |
п2 |
= F(x) + m dV . |
1 |
|
|
dt |
|||
|
|
|
|
|
|
Разделив каждое слагаемое в уравнении на массу поршня m, после преобразования получим дифференциальное уравнение поршня гидроцилиндра:
dV = |
S1 |
p |
− |
S2 |
p |
2 |
− |
1 |
F(x) . |
(9.16) |
|
|
|
||||||||
dt |
m |
1 |
|
m |
|
m |
|
|
||
|
|
|
|
|
|
|||||
268
Отметим, что связь между ходом поршня и скоростью его перемещения определяется уравнением
dx |
=V . |
(9.17) |
dt |
|
|
Важнейшим элементом гидропривода является насос (или насосная установка). В большинстве гидроприводов он является источником гидравлического питания. Для описания работы насосных установок можно использовать обычные алгебраические уравнения, описав с их помощью графические зависимости, приведенные на рис. 9.3. Для этого целесообразно использовать линейные уравнения следующего вида:
p = B − kн Q . |
(9.18) |
Однако величины B и kн необходимо находить отдельно для линий АС и CD по положениям точек А, С и D.
Кроме насоса, в качестве источника гидравлической энергии может быть использован также гидроаккумулятор. Получим уравнения для пневматического гидроаккумулятора как наиболее распространенного
(рис. 9.11,в).
Учитывая, что скорости движения подвижных частей гидроаккумулятора (и жидкости в нем) существенно меньше скоростей движения жидкости в трубопроводах, при записи уравнений инерцией этих масс пренебрежем. Такую математическую модель принято называть безынерционным гидроаккумулятором.
Начальными условиями для пневматического гидроаккумулятора (рис. 9.11,в) являются параметры при максимальном объеме газовой полости Wк и давлении зарядки рзар. В процессе работы гидроаккумулятора параметры W и р меняются в соответствии с законом p Wnк = const.
Из анализа рис. 9.11,в следует, что объем жидкости в рабочей камере гидроаккумулятора Wж =Wк −W . Выразим из формулы pзар Wnк = p Wn
текущее значение объема Wи подставим его в выражение для Wж Wж =Wo −Wк n pзар p11/ n .
Продифференцировав полученное выражение по времени, найдем величину расхода рабочей жидкости из аккумулятора при падении давления
Q = |
dW |
ж = |
Wк n pзар |
|
1 |
|
dp |
. |
|
dt |
n |
p1+1/ n |
dt |
||||||
|
|
|
|
|
Обозначив константы
1 |
= |
Wк n |
pзар |
и α =1 + |
1 |
, |
A |
n |
|
n |
|||
|
|
|
|
269
окончательно получим дифференциальное уравнение пневматического гидроаккумулятора:
dp |
= A pα Q . |
(9.19) |
dt |
|
|
Таким образом, можно выделить четыре типа уравнений для описания работы различных элементов гидроприводов.
В уравнениях первого типа переменным параметром, стоящим под знаком дифференциала, является расход жидкости или величина пропорциональная ему – скорость. Это уравнения гидролиний (9.15) и гидроцилиндров (9.16).
К уравнениям второго типа отнесем зависимости, в которых переменным является ход исполнительного устройства, стоящий под знаком дифференциала. Таким уравнением является формула для скорости выходного звена гидроцилиндра (9.17).
Уравнения третьего типа имеют в качестве неизвестного параметра, стоящего под знаком дифференциала, какое-то давление в точке (узле) гидропривода. Таким уравнением является зависимость (9.19), записанная для пневматического гидроаккумулятора.
Давления в отдельных узлах могут также определяться алгебраическими (недифференциальными) уравнениями. Например, зависимость (9.18), записанная для насоса. Такие уравнения отнесем к уравнениям чет-
вертого типа.
Имея математические зависимости для моделирования работы отдельных элементов гидропривода (9.15)…(9.19), необходимо их объединить в систему уравнений. Это является постановкой задачи на динамический расчет гидропривода, т.е. на математическое моделирование его работы при неустановившихся режимах. Рассмотрим эту задачу на конкретном примере.
Пусть источниками гидравлического питания в приводе (рис. 9.12,а) является насосная установка a и пневматический гидроаккумулятор b. От них потоки движутся по трубопроводам 1 и 2, соединяются в гидрораспределителе c и далее общий поток поступает в гидроцилиндр 3, на шток которого действует переменная по ходу нагрузка F(x). Считаем, что трубопровод от распределителя c до гидроцилиндра 3 мал и потерями в нем пренебрегаем. Из штоковой полости гидроцилиндра 3 жидкость движется по трубопроводу 4 и в точке e разветвляется на два потока. Один из них поступает в бак через фильтр и трубопровод 5, а второй – через дроссель и трубопровод 6. В общем случае будем считать, что в трубопроводах 1, 2, 5 и 6 имеются как потери на трение по длине, так и потери в местных сопротивлениях.
270