

Шейпак А.А. Гидравлика и гидропневмопривод (часть 2)
.pdfВся жидкость от насоса идет в гидросистему, т.е. Qну = Qн. Этому режиму работы соответствует линия АС на рис 5.16. При расчетном давлении рр клапан начнет открываться (точка С на рис. 5.16). Дальнейшее повышение давления приведет к тому, что часть подачи насоса Qн будет направляться через щель 1 клапана 2 в бак Qкл, а подача насосной установки уменьшится Qну = Qн - Qкл (точка R на рис. 5.16). При увеличении давления на выходе насоса будет увеличиваться степень открытия щели 1, следовательно, и расход через клапан Qкл, а подача Qну насосной установки будет уменьшаться. Наконец, при давлении на выходе насоса р = рmax поршень 3 полностью сместится вниз и вся подача насоса через щель 1 будет перепускаться в бак Qн = Qкл, а подача насосной установки станет равной нулю
Qну = 0 (точка D на рис. 5.16).
Рис. 5.17. Способы регулирования подачи:
а) с помощью переливного клапана; б) с помощью регулятора подачи
Вторым способом изменения подачи насоса можно назвать использование регуляторов. Этот способ применим только для регулируемых насосов, т.е. для насосов, у которых имеется возможность изменения рабочего объема. На рис. 5.17,б представлена схема насосной установки, которая включает аксиально-поршневой насос 1 с наклонным диском 2 и регулятор подачи 3. Основным элементом регулятора является подпружиненный поршень 4, который кинематически связан с наклонным диском 2. Рассмотрим работу приведенной установки. Пока давление насоса мало, поршень 4 под действием пружины занимает крайнее правое положение, диск 2 наклонен под углом γmax и подача насоса максимальна. Этому режиму работы соответствует линия АС на рис 5.16. При расчетном давлении рр поршень 4 начнет сдвигаться влево (точка С на рис. 5.16). Дальнейшее повышение давления приведет к тому, что поршень 4 будет занимать промежуточное положение, диск насоса будет установлен под углом – 0 < γ < γmax, а подача 0 < Q < Qmax. Этот режим будет соответствовать одной из точек линии СD на рис. 5.16, например, точке R. При увеличении давле-
131

ния на выходе насоса 1 поршень 4 будет смещаться дальше влево. Поэтому угол γ и подача насоса Q будут уменьшаться. Наконец, при давлении на выходе насоса р = рmax поршень 4 займет крайнее левое положение. Угол наклона диска γ и подача насоса Q станут равными нулю (точка D на рис. 5.16).
Рассмотренные способы регулирования подачи насосов используются
втехнике. Второй из них требует регулируемых насосов, которые сложны
визготовлении и, следовательно, насосная установка с регулятором подачи дороже. Однако при использовании насосной установки с переливным клапаном часть подачи насоса перепускается в бак через клапан, не совершая полезной работы. Поэтому насосная установка с клапаном менее экономична в эксплуатации.
Аналитическую зависимость регуляторной ветви (линии 3, рис. 5.16) для обоих рассмотренных случаях с достаточной степенью точности можно записать в виде:
Qну = Qр − Kр (p − pр ), |
(5.11) |
где Kр – коэффициент, учитывающий наклон линии AD на рис. 5.16. Он зависит от жесткости пружины регулятора или переливного клапана и может быть вычислен при известных параметрах (pmax, Qр и рр).
В заключение следует отметить, что формулы (1.17) и (5.10) широко используются не только при построении характеристик насосов, но и в других расчетах. Кроме них, при расчете гидросистем используется также зависимость, связывающая перепад давления на насосе р с крутящим моментом М на его валу:
M = 21π Wo p η1м ,
где ηм – механический КПД насоса.
Ранее были рассмотрены характеристики насосов и насосных установок, работающих при постоянных (максимальных) значениях рабочих объемов. В том случае, когда в процессе работы насоса меняется его рабочий объем, для удобства анализа вводят относительный параметр, равный отношению текущего рабочего объема насоса W к максимальному Wo, т.е.
|
e =W W . |
|
|
(5.12) |
|
|
|
o |
|
|
|
Этот параметр е принято называть параметром регулирования. |
|
||||
С учетом параметра регулирования подача насоса на любом режиме |
|||||
насоса определяется зависимостью |
|
|
|
||
Q = Qт ηo =Wo e n ηo , |
(5.13) |
||||
а момент на его валу |
|
|
|
|
|
M = |
1 |
W e p |
1 |
. |
|
2π |
|
|
|||
|
o |
ηм |
|
||
132
5.8.Объемные гидравлические двигатели
Вгидравлических двигателях происходит преобразование энергии потока жидкости в механическую работу. В объемных гидродвигателях это преобразование осуществляется в замкнутых объемах (рабочих камерах), которые попеременно сообщаются с напорной и сливной полостями. Гидродвигатель – это гидромашина, «противоположная» насосу. К нему подводится жидкость под давлением, а на выходе имеет место возвратнопоступательное или вращательное движения выходного звена.
По характеру движения выходного звена во всём многообразии объемных гидродвигателей выделяют две большие группы: гидравлические цилиндры (гидроцилиндры) и гидравлические моторы (гидромоторы).
5.8.1. Гидроцилиндры
Гидравлическим цилиндром называется объемный гидродвигатель с возвратно-поступательным движением выходного звена. Гидроцилиндры широко применяются в качестве исполнительных механизмов различных машин. По конструкции и принципу действия гидроцилиндры очень разнообразны и классифицируются в соответствии с ГОСТ 17752-81. В данном учебнике эта классификация будет использована лишь частично.
По направлению действия рабочей жидкости все гидроцилиндры можно разделить на две группы: одностороннего и двухстороннего действия. На рабочий орган гидроцилиндра одностороннего действия жидкость может оказывать давление только с одной стороны, как, например, в схемах на рис. 5.18,а,г. Там движение поршня вправо обеспечивается за счет давления жидкости, подводимой в левую полость гидроцилиндра. Обратное перемещение в гидроцилиндрах одностороннего действия обеспечивается другим способом. Наиболее часто это достигается за счет пружины (рис. 5.18,а) или веса груза при вертикальном движении поршня (рис. 5.18,д). Перемещение рабочего органа гидроцилиндра двухстороннего действия в обоих направлениях обеспечивается за счет рабочей жидкости (рис. 5.18,б,в). В таких гидроцилиндрах жидкость может подводиться как в левую полость (тогда поршень движется вправо), так и в правую для обеспечения движения влево.
Гидроцилиндры подразделяются также по конструкции рабочего органа. Наибольшее распространение получили цилиндры с рабочим органом в виде поршня или плунжера. Причем поршневые гидроцилиндры могут быть выполнены с односторонним (рис. 5.18,а,б) или двухсторонним штоком (5.18,в). Плунжерные гидроцилиндры (рис. 5.18,г) могут быть только одностороннего действия, с односторонним штоком.
По характеру хода выходного звена гидроцилиндры делятся на одноступенчатые и телескопические (многоступенчатые). Одноступенчатые гидроцилиндры рассмотрены ранее (рис. 5.18,а,б,в,г). Телескопические гидро-
133

цилиндры представляют собой несколько вставленных друг в друга поршней. В качестве примера на рис. 5.18,д приведена схема двухступенчатого телескопического гидроцилиндра одностороннего действия. В таком гидроцилиндре поршни выдвигаются последовательно друг за другом. Телескопические гидроцилиндры применяются для получения больших перемещений.
Рис. 5.18. Разновидности гидроцилиндров:
а) поршневой одностороннего действия; б) поршневой двухстороннего действия; в) поршневой двухстороннего действия с двухсторонним штоком; г) плунжерный; д) телескопический одностороннего действия
Полный КПД гидроцилиндров определяется в первую очередь величиной механического КПД, который для большинства конструкций составляет ηм = 0,85…0,95. Гидравлические потери в цилиндрах практически отсутствуют и гидравлический КПД равен единице (ηг = 1). Объемные потери в рассматриваемых устройствах могут иметь место в зазоре между поршнем и цилиндром. Однако при уплотнении этого места резиновыми кольцами или манжетами они очень малы. Тогда объемный КПД также можно считать равным единице (ηо = 1).
При расчете гидроцилиндров используются две основные формулы. Первая из них связывает силу F на штоке (рис. 5.19) и перепад давлений на гидроцилиндре p = p1 – p2. С некоторым упрощением она выглядит следующим образом:
F = p S ηм , |
(5.14) |
где S – активная площадь, на которую действует подводимое (высокое) давление. При движении жидкости по сплошным стрелкам на расчетной
134

схеме (рис. 5.19) этой площадью является площадь поршня (S = Sп), а при обратном движении (движение по штриховым стрелкам на схеме) – площадь поршня за вычетом площади штока (S = Sп – Sш).
Вторая формула связывает расход и скорость поршня
Q =Vп Sп ηо
|
или |
(5.15) |
|
|
Q' =Vп (Sп − Sш ) ηо . |
|
|
|
Формула |
записана в |
двух |
|
вариантах. Это вызвано тем, что |
||
|
расходы до |
гидроцилиндра и |
|
|
после него различны. Для пояс- |
||
Рис. 5.19. Расчетная схема |
нения этого |
представим, |
что |
|
поршень на |
расчетной схеме |
|
(рис. 5.19) переместился из начального положения вправо на расстояние l (равное толщине поршня). В таком случае в левую полость гидроцилиндра поступил объем жидкости, равный объему поршня (W = Sп l), а из правой
полости вытеснился меньший объем W' = (Sп –Sш) l |
(W' на рис 5.19 за- |
||||
штрихован). Из соотношения объемов W и W' следует, что расходы до и |
|||||
после гидроцилиндра связаны зависимостью |
|
||||
|
Q |
Sп |
|
||
|
|
= |
|
. |
(5.16) |
|
Q' |
Sп − Sш |
|||
Это соотношение следует учитывать при проведении расчетов.
Для обозначения гидроцилиндров на гидравлических схемах используются их предельно упрощенные конструктивные изображения (без лишних линий и штриховок). В качестве примера на рис. 5.18 под конструктивными схемами цилиндров приведены их условные изображения.
5.8.2. Гидромоторы
Гидромотором называется объемный гидравлический двигатель с вращательным движением выходного звена. Наибольшее распространение получили роторные гидромоторы. Их конструкции ничем принципиально не отличаются от конструкций одноименных роторных насосов. Некоторые конструктивные отличия обычно вызваны обратным направлением потока мощности через гидромотор (по сравнению с насосом).
Распространение получили шестеренные, пластинчатые и роторнопоршневые гидромоторы. Их конструктивные схемы также не отличаются от конструктивных схем аналогичных насосов, приведенных на рис. 5.8-5.15. При рассмотрении этих схем применительно к гидромоторам необходимо учитывать, что мощность к гидродвигателю подводится с потоком жидкости. В гидромоторе она преобразуется во вращательное дви-
135
жение, а затем реализуется в виде крутящего момента на его выходном валу.
Наиболее широко используются роторно-поршневые гидромоторы. При этом аксиально-поршневые применяются в случае необходимости получения на выходе высоких скоростей вращения, а радиальнопоршневые гидромоторы – для получения низких скоростей вращения (в частности, используются в мотор-колесах самоходных машин).
Основной характеристикой геометрических размеров роторных гидромоторов, как и роторных насосов, является их рабочий объем Wo. Эта величина имеет тот же физический смысл и определяется так же, как и у насосов. Следует отметить, что гидромоторы и аналогичные им насосы могут быть с переменным рабочим объемом, т.е. регулируемыми.
Полные КПД роторных гидромоторов определяются произведением объемного и механического КПД. Гидравлические потери в этих гидромоторах малы, поэтому их гидравлические КПД принимают равными единице (ηг = 1). Численные значения объемных ηо и механических ηм КПД роторных гидромашин практически не отличаются от аналогичных величин для однотипных насосов.
При расчете гидромоторов используются две основные формулы. Они несколько отличаются от аналогичных формул для роторных насосов из-за противоположного направления потока мощности. Первая из этих формул связывает момент на валу гидромотора с перепадом давлений в
напорном и сливном трубопроводах p = p1 – p2: |
|
|||||
M = |
1 |
Wo p ηм . |
(5.17) |
|||
2π |
||||||
|
|
|
|
|
||
Вторая формула связывает расход Q через гидромотор с частотой вра- |
||||||
щения его вала n: |
|
1 |
|
|
||
Q =Wo |
n |
. |
(5.18) |
|||
|
||||||
|
|
|
ηо |
|
||
Для обозначения гидромоторов на принципиальных гидравлических схемах используется та же система символов, что для обозначения роторных насосов (рис. 5.20). Но в отличие от насосов у гидромоторов стрелки (треугольники) внутри окружностей, указывающие направление движения жидкости, всегда направлены внутрь окружности. Символ регулируемых гидромоторов также перечеркивается тонкой стрелкой.
В заключение следует отметить, что выпускаются роторные гидромашины, которые могут работать как в режиме насоса, так и в режиме гидромотора. Такие гидромашины принято называть насос-моторами. Символические обозначения насос-моторов также приведены на рис. 5.20.
136
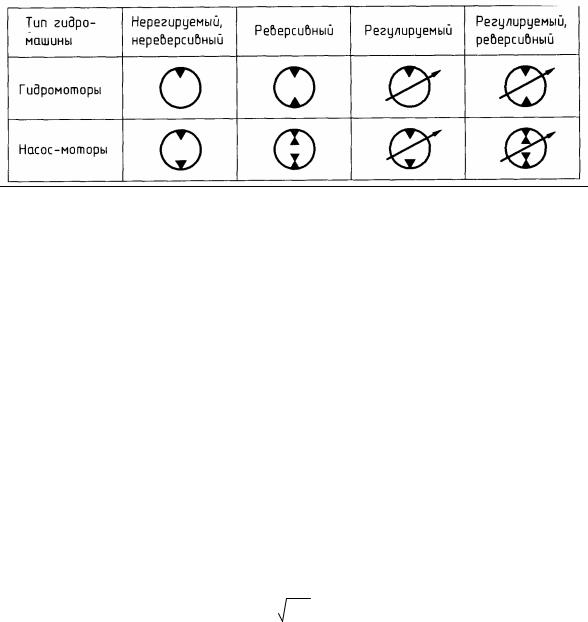
Рис. 5.20. Обозначения роторных гидромоторов и насос-моторов
5.9. Основы теории подобия роторных гидромашин
Теория подобия роторных гидромашин позволяет на основе анализа общих свойств ряда насосов и гидромоторов получить формулы для оценки их КПД с достаточно высокой точностью. В основе этой теории лежит следующая гипотеза: для конструктивно подобных гидромашин процессы внутри них (в том числе потери энергии) подобны, независимо от их геометрических размеров. Действительно, если производственная фирма выпускает серию насосов (или гидромоторов), то в большинстве случаев их размеры увеличиваются с увеличением передаваемой мощности, а соотношения размеров у гидромашины каждого типоразмера практически не меняются.
В дальнейшем под геометрически подобными будем понимать насосы или гидромоторы, соотношение размеров которых не зависит от их величины. Основным параметром, определяющим величину гидромашины, является её характéрный размер D. Характерный размер – это условная величина, связанная с рабочим объемом насоса Wo зависимостью
D = 3 W . |
(5.19) |
o |
|
Особенностью работы роторных гидромашин является наличие множества зазоров с неподвижными и подвижными стенками, в которых происходят основные потери энергии. Общая теория подобия, предложенная проф. Мишке В.В., объясняет, что все энергетические потери в этих зазорах можно приравнять потерям в каком-то условном (эквивалентном) зазоре. Причем линейные размеры этого зазора (толщина δ, длина l, ширина b и т. д.) пропорциональны характерному размеру гидромашины D. Тогда
δ = kδ D , |
b = kb D , |
l = kl D , |
(5.20) |
а любая i-я площадь эквивалентного зазора |
|
|
|
|
Si = kSi D2 . |
|
(5.21) |
Для анализа работы роторных гидромашин все потери в них (в зазорах) можно разделить на три группы: потери на утечки жидкости из полостей с высоким давлением, потери на жидкостное трение и потери на сухое трение. Получим формулы для вычисления каждого из отмеченных видов потерь энергии.
137

Для определения потерь на утечки жидкости будем считать, что в зазорах существуют ламинарные течения. Тогда величина (расход) утечек жидкости с динамической вязкостью µ под действием перепада давления р, в соответствии с законом Пуазейля, определится зависимостью
Qy = k'y δµ3 lb p ,
где k'у – коэффициент пропорциональности. Умножая расход Qy на пере-
пад давления на гидромашине р, с учетом соотношений (5.20) и (5.21) получим формулу для вычисления потерь мощности на утечки:
Ny = Qy p = k'y |
δ3 b |
p2 |
= ky |
p2 |
D3 , |
(5.22) |
|
µ l |
µ |
||||||
|
|
|
|
|
|||
где kу – коэффициент пропорциональности ( ky = k'y kδ3 kb / kl ), |
постоян- |
||||||
ный для геометрически подобных гидромашин.
Потери на жидкостное трение найдем для случая, когда одна из поверхностей эквивалентного зазора движется относительно другой с линейной скоростью, пропорциональной произведению угловой скорости ω на характерный размер D, т.е. (ω·D). Тогда в соответствии с законом Ньютона будем считать, что величина силы жидкостного трения пропорциональна динамической вязкости жидкости µ, площади трущихся поверхностей S и градиенту скорости (ω·D / δ). Тогда мощность потерь на жидкостное трение найдем, умножив эту силу на линейную скорость, пропорциональную
ω·D, и с учетом (5.20) - (5.21) получим
Nж = k'жµ S |
ω D |
(ω D) = kж µ ω2 |
D3 , |
(5.23) |
|
δ |
|||||
|
|
|
|
где k'ж, kж – коэффициенты пропорциональности ( kж = k'ж kS / kδ ).
Выражение для потерь мощности на сухое трение получим, принимая коэффициент трения постоянным. Тогда считая, что сила трения пропорциональна произведению давления р на площадь S, а относительная скорость перемещения произведению ω·D, запишем с учетом (5.20) выражение для потерь на сухое трение
Nc = kc′ ( p S) (ωD) = kc p ω D3 , |
(5.24) |
где k'с, kс – коэффициенты пропорциональности ( kc = k'c kS ).
Для удобства анализа полученные формулы (5.22) - (5.24) определения потерь энергии в гидромашинах целесообразно привести к относительному виду. С этой целью запишем математическое выражение для индикаторной мощности гидромашины, т. е. мощности в «рабочем объеме» (в рабочих камерах) гидромашины без учета объемных потерь. При записи этой зависимости с помощью параметра регулирования е гидромашины (5.13) учтем возможность её работы на неполных рабочих объемах. Тогда
Ni = p Qт = p (ω W o e) = p ω D3 e.
138

Поделив на последнюю формулу зависимости (5.22), (5.23) и (5.24), получим математические выражения для относительных объемных потерь
N |
y |
= Ny |
Ni |
= k |
y |
|
p |
|
1 |
, |
(5.25) |
||||
|
|
|
|
|
|
|
µ ω |
|
e |
|
|
||||
относительных потерь на жидкостное трение |
|
1 |
|
|
|||||||||||
N |
ж |
|
= Nж |
Ni |
= k |
ж |
|
µ ω |
|
|
(5.26) |
||||
|
|
|
|
|
|
р |
|
e |
|
|
|||||
и относительных потерь на сухое трение |
|
|
|
|
|
|
|
|
|||||||
|
|
|
с = Nc / Ni = kc / e . |
|
|
|
(5.27) |
||||||||
|
N |
|
|
|
|||||||||||
Имея математические выражения для оценки относительных потерь энергии, можно получить формулы для определения КПД гидромашин. Для получения этих формул на рис. 5.21 приведены балансы мощности на роторном насосе и роторном гидромоторе.
Рис. 5.21. Балансы мощностей роторных гидромашин: а) для насоса; б) для гидромотора
Из анализа баланса мощностей на насосе (рис. 5.21,а) следует, что потребляемая мощность Nпотр подводится к валу насоса, а затем преобразуется в индикаторную мощность Ni в рабочей камере. При этом преобразовании часть мощности теряется на механические потери Nм, равные сумме потерь на жидкостное Nж и сухое трение Nс. Индикаторная мощность Ni при вытеснении жидкости в трубопровод преобразуется в полезную мощность насоса Nпол. При этом преобразовании часть мощности теряется с объемными потерями Nу (утечки жидкости через зазоры), а часть Nг тра-
139
тится на преодоление гидравлических сопротивлений при вытеснении жидкости из рабочей камеры в трубопровод. Однако, как показывает практика, последние потери Nг малы и ими пренебрегают (на рис. 5.21 показаны тонкой линией). Схема баланса мощностей (рис. 5.21,а) позволяет записать базовые зависимости для объемного и механического КПД насоса:
η |
= |
Nпол |
= |
Ni − Ny |
=1− |
|
|
, |
η |
|
= |
Ni |
= |
Ni |
= |
|
|
1 |
|
|
. |
N |
y |
|
|
|
|||||||||||||||||
|
|
|
|
Ni + Nм |
1 |
|
|
|
|||||||||||||
o |
|
Ni |
Ni |
|
|
м |
|
Nпотр |
|
+ Nм |
|||||||||||
Подставив в последние выражения зависимости (5.27) – (5.29), окончательно получим формулы для объемного и механического КПД насоса:
ηo =1 − ky |
p |
|
|
1 |
(5.28) и ηм = |
|
1 |
|
|
|
. |
(5.29) |
µ ω |
e |
|
µ ω |
|
1 |
|||||||
|
|
|
|
|
1 + (kж |
|
|
+ kc ) |
|
|
|
|
|
|
|
|
|
p |
e |
|
|||||
|
|
|
|
|
|
|
|
|
||||
Из анализа баланса мощности на гидромоторе (рис. 5.21,б) следует, что поток мощности через него проходит в обратном направлении (от
жидкости на вал). |
Схема баланса мощностей (рис. 5.21,б) позволяет запи- |
||||||||||||||||||||||||||
сать базовые зависимости для объемного и механического КПД насоса: |
|||||||||||||||||||||||||||
ηo = |
Ni |
= |
|
Ni |
|
= |
|
|
1 |
|
|
и |
ηм = |
Nпол |
= |
Ni |
− Nж |
=1 − |
|
ж . |
|||||||
|
|
|
|
|
|
N |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Nпотр |
|
Ni + Ny |
1 |
+ Ny |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
Ni |
Ni |
|
|
||||||||||||||||
Используя зависимости (5.27) – (5.29), получим формулы для объем- |
|||||||||||||||||||||||||||
ного и механического КПД гидромотора: |
|
|
|
|
|
1 |
|
|
|
||||||||||||||||||
ηo = |
|
|
1 |
|
|
|
|
|
(5.30) и |
ηм |
=1 − (kж µ ω + kc ) |
. |
(5.31) |
||||||||||||||
|
|
|
|
|
p |
|
|
1 |
|
||||||||||||||||||
|
1 + ky |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
e |
|
|
|||||
|
|
µ ω |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Чтобы использовать полученные формулы в инженерных расчетах, необходимы численные значения коэффициентов потерь kу, kж и kс. Их определение может быть проведено только экспериментально. Наиболее просто отмеченные коэффициенты могут быть определены по известным значениям объемного ηо, механического ηм и полного КПД η на режиме максимального значения последнего (при е=1). Эти величины обычно задаются в паспорте гидромашины. В дальнейшем параметры гидромашин на этом режиме будем обозначать с индексом * (ω*, p*, ηо*, η* и т. д.).
Для определения kу, kж иkс необходимо решить систему трех нелинейных уравнений, два из которых записаны выше: (5.28) и (5.29) для насоса или (5.30) и (5.31) для гидромотора. Третье уравнение получим после дифференцирования выражения для полного КПД (η = ηо · ηм) по универсальному параметру σ = р / (µ · ω) (σ принято называть коэффициентом изогональности). Приравняем полученное выражение к нулю на режиме с максимальным значением η*. После решения отмеченных систем уравнений получим формулы для определения коэффициентов потерь kу, kж и kс.
140