

Шейпак А.А. Гидравлика и гидропневмопривод (часть 2)
.pdfПринципиальная схема двухдроссельного гидрораспределителя типа
«сопло-заслонка» приведена на рис. 6.30,б. Этот гидрораспределитель представляет собой гидравлический мостик, состоящий из двух регулируемых гидродросселей «сопло-заслонка» и двух постоянных (балансных) гидродросселей. В диагональ гидравлического мостика включена нагрузка (гидродвигатель).
Рис. 6.30. Гидрораспределители типа «сопло-заслонка»: а) однодроссельный; б) двухдроссельный
Поток жидкости с постоянным давлением подводится к точке между двумя постоянными гидродросселями. При смещении заслонки от нейтрального положения, например влево, давление p1 увеличивается, а давление p2 уменьшается. Под действием возникающего перепада давлений выходное звено гидродвигателя движется со скоростью, пропорциональной смещению заслонки. При смещении заслонки вправо возникает перепад давления противоположного знака, и выходное звено гидродвигателя движется в противоположную сторону.
6.7. Электрогидравлические усилители мощности управляющего сигнала
Часто в гидроприводах с электрическим управлением используются устройства предварительного усиления мощности входного управляющего сигнала. В этом случае применяют устройства, для которых входным является электрический сигнал, а выходным – некоторый поток рабочей жидкости с параметром (расходом или давлением) пропорциональным величине входного сигнала. Направление потока или знак перепада давления при этом соответствует знаку входного электрического сигнала. Такие устрой-
ства называются электрогидравлическими усилителями (ЭГУ).
ЭГУ состоит из электромеханического преобразователя (ЭМП), в ко-
тором электрический сигнал преобразуется в некоторое механическое пе-
191
ремещение (поворот вала или перемещение толкателя электромагнита), и гидравлического усилителя (ГУ) мощности, в качестве которого используется, как правило, дросселирующий гидрораспределитель.
Одной из проблем, возникающих при этом, является то, что мощности электрического сигнала не достаточно для обеспечения перемещения золотника дросселирующего гидрораспределителя. В этом случае применяют так называемые многокаскадные ЭГУ с двумя и более каскадами усиления входного сигнала.
На рис. 6.31 в качестве примера приведена схема двухкаскадного ЭГУ, в котором в первом каскаде гидравлического усиления используется
гидроусилитель «сопло-заслонка».
а)
б)
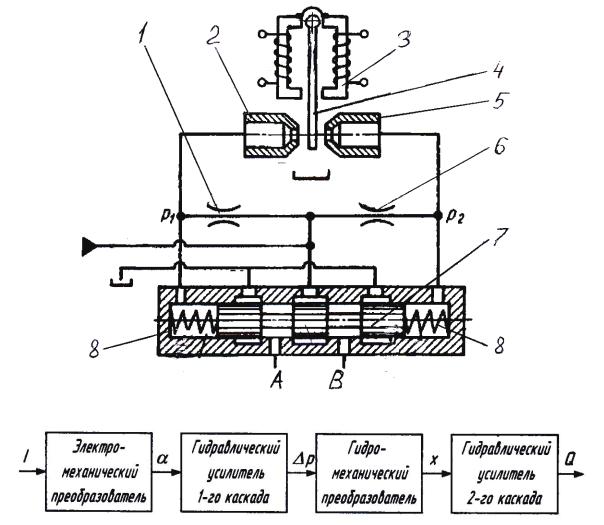
Рис. 6.31. Электрогидравлический усилитель: а) конструктивная схема; б) блок-схема
Этот гидроусилитель представляет собой гидравлический мостик, состоящий из двух регулируемых гидродросселей 2 и 5 «сопло-заслонка» и двух постоянных (балансных) гидродросселей 1 и 6. В диагональ этого гидравлического мостика включен подпружиненный центрирующими
192
пружинами 8 золотник 7 дросселирующего гидрораспределителя, который является гидроусилителем второго каскада усиления ЭГУ.
Итак, электрогидравлический усилитель, схема которого приведена на рис. 6.31,а, можно представить в виде блок-схемы (рис. 6.31,б). Вначале электрический сигнал управления (электрический ток I) поступает на электромеханический преобразователь 3 (ЭМП), который преобразует его в некоторый угол поворота α якоря, пропорциональный величине электрического тока I.
Вместе с якорем поворачивается на угол α жестко связанная с ним заслонка 4, расположенная между двумя соплами 2 и 5, так, что гидравлическое сопротивление одного из регулируемых гидродросселей «соплозаслонка» возрастает, а другого – уменьшается. В результате образуется некоторый перепад давления ∆p = p1 − p2 , величина которого пропорцио-
нальна величине угла α. Таким образом, для гидроусилителя «соплозаслонка», являющегося гидроусилителем первого каскада, входным сигналом управления является угол поворота α заслонки, а выходным – перепад давления ∆p.
Так как давления p1 и p2 поступают в торцевые полости дросселирующего гидрораспределителя, то образовавшийся перепад давления ∆p создает соответствующее усилие, действующее на золотник 7. Это приводит к тому, что золотник 7 смещается из нейтрального положения на некоторую величину x. Величина этого смещения x определяется жесткостью центрирующих пружин 8 золотника 7, а значит, пропорциональна величине перепада давления ∆p на его торцах. Таким образом, центрирующие пружины 8 золотника 7 и его торцевые поверхности выполняют роль гид-
ромеханического преобразователя (ГМП), который преобразует образо-
вавшийся перепад давления ∆p на торцах золотника в его перемещение x. Смещение золотника 7 из нейтрального положения на величину x приводит к тому, что открываются соответствующие проходные сечения дросселирующего гидрораспределителя. Например, если золотник 7 сместится вправо, то гидролиния А соединится с напорным трубопроводом, а гидролиния В – со сливным. Через открывшиеся дросселирующие окна гидрораспределителя начнется движение рабочей жидкости с расходом Q, пропорциональным величине смещения золотника x. Для дросселирующего гидрораспределителя, являющегося гидроусилителем второго каскада, входным сигналом управления является смещение золотника x, а выход-
ным – расход рабочей жидкости Q, поступающий к потребителю.
Под коэффициентом усиления рассмотренного электрогидроусилителя понимается отношение мощности потока рабочей жидкости, поступающей к потребителю, к мощности электрического сигнала управления. Очевидно, что этот коэффициент может иметь значительную величину.
193
Глава 7 НЕРЕГУЛИРУЕМЫЕ И РЕГУЛИРУЕМЫЕ
ОБЪЕМНЫЕ ГИДРОПРИВОДЫ
7.1. Нерегулируемый объемный гидропривод
Если в гидроприводе предусмотрена только возможность изменения направления движения выходного звена при постоянной величине скорости, то такой гидропривод называется нерегулируемым.
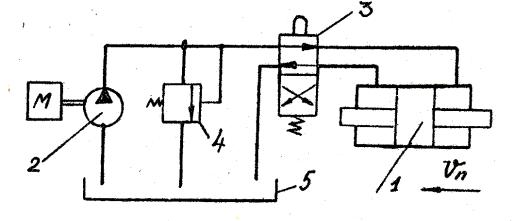
На рис. 7.1 представлена принципиальная схема нерегулируемого гидропривода поступательного движения.
Рис. 7.1. Нерегулируемый гидропривод поступательного движения
В таком гидроприводе скорость Vп поступательного движения штока гидроцилиндра 1 определяется величиной подачи Qн нерегулируемого насоса 2 и эффективной площадью Sп поршня гидроцилиндра 1, а значит, в первом приближении, есть величина нерегулируемая (постоянная). При отсутствии объемных потерь в элементах гидропривода
V |
= Qн = const . |
(7.1) |
п |
Sп |
|
Направление движения штока гидроцилиндра 1 определяется позицией, в которой находится гидрораспределитель 3, а предохранительный гидроклапан 4 обеспечивает защиту элементов гидропривода от давления, превышающего допустимую величину, которое возможно, например, в случае, когда поршень гидроцилиндра 1 достигнет одного из крайних своих положений.
Следует отметить, что гидропривод, схема которого представлена на рис. 7.1, относится к гидроприводам с разомкнутой циркуляцией (см. пара-
граф 4.1).
Для сравнения на рис. 7.2 приведена схема нерегулируемого гидропривода вращательного движения с замкнутой циркуляцией.
194
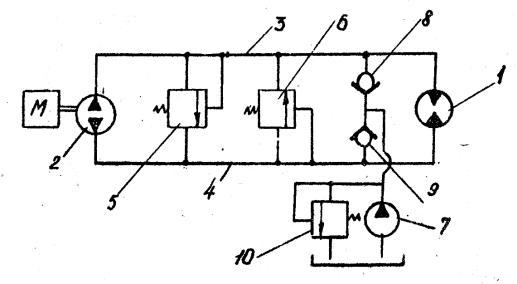
Вэтом приводе частота вращения nг вала гидромотора 1, так же как и
впредыдущем случае, определяется подачей Qн нерегулируемого насоса 2 и рабочим объемом Wг гидромотора 1, а значит, в первом приближении, есть величина нерегулируемая (постоянная). При отсутствии объемных потерь в элементах гидропривода
nг = |
Qн |
= const . |
(7.2) |
|
|||
Wг |
|
||
В данном случае изменение направления вращения вала гидромотора 1 обеспечивается за счет реверса подачи насоса путем изменения направления вращения вала приводного двигателя М.
Рис. 7.2. Нерегулируемый гидропривод вращательного движения
Очевидно, что в таком гидроприводе и гидролиния 3, и гидролиния 4 могут оказаться либо напорными, либо всасывающими. Каждую из них необходимо предохранить как от чрезмерно высокого, так и от чрезмерно низкого давления. С этой целью в гидроприводе используются два предохранительных клапана: клапан 5 следит за величиной давления в гидролинии 3, а клапан 6 – за давлением в гидролинии 4, и система подпитки.
Система подпитки состоит из нерегулируемого нереверсивного насоса подпитки 7, переливного клапана 10 и двух обратных клапанов 8 и 9. Эта система исключает возможность возникновения во всасывающей гидролинии (либо в гидролинии 3, либо в гидролинии 4) давления ниже, чем давление настройки переливного клапана 10. Следовательно, она обеспечивает заполнение рабочих камер насоса жидкостью и исключает вероятность кавитации на входе в насос.
Нерегулируемые гидроприводы из-за своей простоты, надежности и дешевизны широко применяются при механизации несложных вспомогательных операций, где не требуется управлять скоростью движения (перемещение без позиционирования, зажим и т.д.). Однако область использования их при автоматизации и механизации операций в современных машинах ограничена. Поэтому на практике значительно большее распростра-
195
нение получили регулируемые гидроприводы, в которых помимо изменения направления движения выходного звена имеется также возможность регулирования величины скорости его движения.
К регулируемым объемным гидроприводам относятся:
•гидроприводы, в которых имеется возможность регулирования скорости выходного звена (скорости движения поршня гидроцилиндра или частоты вращения вала гидромотора), в том числе:
•гидроприводы со стабилизацией скорости выходного звена;
•гидроприводы, в которых обеспечивается синхронизация движения выходных звеньев нескольких гидродвигателей;
•следящие гидроприводы.
7.2.Способы регулирования объемных гидроприводов
Восновании всех способов регулирования скорости движения выходных звеньев объемных гидроприводов лежат формулы, которые без учета объемных потерь в гидродвигателях, соответственно, для гидроприводов поступательного и вращательного движения имеют вид:
Vп = |
Q |
, |
nг = |
Q |
. |
(7.3) |
Sп |
|
|||||
|
|
|
Wг |
|
||
Анализ этих формул показывает, что изменение (регулирование) скорости (Vп или nг) выходного звена объемного гидропривода возможно, если управлять величиной расхода Q, поступающего в гидродвигатель, либо при использовании регулируемого гидромотора за счет изменения его рабочего объема Wг. Последний способ в гидроприводах поступательного движения не используется, так как не существует гидроцилиндров с регулируемой эффективной площадью поршня Sп.
На практике используются три способа регулирования скорости движения выходных звеньев объемных гидроприводов: дроссельный, объем-
ный, или машинный, и их комбинация – объемно-дроссельный.
Дроссельный способ регулирования скорости, как правило, использу-
ется в случае, когда гидропривод содержит нерегулируемые гидромашины. При этом регулирование скорости возможно только за счет изменения
величины расхода Q рабочей жидкости, поступающей в гидродвигатель.
Втаких гидроприводах управление величиной расхода Q обеспечивается за счет отвода из напорной гидролинии части подачи насоса, которая не производительно, минуя гидродвигатель, сливается в гидробак. Это управление потоком рабочей жидкости и возлагается на регулируемый гидродроссель, специально установленный в гидросистеме.
Взависимости от места установки регулируемого гидродросселя по отношению к гидродвигателю различают гидроприводы с параллельным включением гидродросселя и гидроприводы с последовательным включением гидродросселя.
196
При объемном способе регулирования скорость движения выходного звена гидропривода изменяется за счет изменения рабочего объема либо насоса (изменяется величина расхода Q, поступающего в гидродвигатель), либо гидромотора (Wг), либо за счет изменения рабочих объемов обеих гидромашин.
Отличительной особенностью объемного способа регулирования скорости является то, что в этом случае не происходит непроизводительного слива части потока рабочей жидкости. По этой причине такие гидроприводы всегда имеют более высокие энергетические характеристики.
Рассмотрим принципиальные схемы регулируемых гидроприводов. При этом для упрощения рассуждений и обеспечения корректности при сравнении полученных результатов сделаем следующие общие допущения:
1)потерями энергии на движение жидкости по трубопроводам и в каналах направляющих гидрораспределителей пренебрегаем;
2)коэффициенты полезного действия гидромашин принимаем равными единице (отсутствуют потери энергии на ее преобразование в гидромашинах).
7.2.1. Гидропривод с дроссельным регулированием скорости при параллельном включении дросселя
На рис. 7.3 приведена принципиальная схема гидропривода, в котором имеется возможность регулировать величину скорости движения поршня гидроцилиндра 4 (выходного звена гидропривода) за счет изменения площади проходного сечения регулируемого гидродросселя 5, включенного параллельно гидродвигателю.
Рис. 7.3. Гидропривод с дроссельным регулированием скорости при параллельном включении дросселя
197
Расход Qг, поступающий в гидроцилиндр 4, равен: |
|
|
Qг = Qн −Qдр, |
(7.4) |
|
где Qн – подача нерегулируемого насоса 1; |
|
|
Qдр – расход, сливающийся через регулируемый |
гидродроссель 5 |
|
в бак 6. |
|
|
Расход Qдр определяется из формулы истечения, которая здесь имеет |
||
вид: |
|
|
Qдр = µSдр |
2 ∆pдр , |
(7.5) |
|
ρ |
|
где µ – коэффициент расхода гидродросселя;
Sдр – площадь проходного сечения гидродросселя; ρ – плотность рабочей жидкости;
∆pдр – перепад давления на гидродросселе. С учетом принятых допущений
∆pдр = F ,
Sп
где F – внешняя преодолеваемая нагрузка на штоке гидроцилиндра, Sп – эффективная площадь поршня гидроцилиндра.
Следовательно, скорость движения поршня гидроцилиндра в данном случае равна:
Q |
1 |
|
|
−µS |
|
2 F |
|
(7.6) |
V = г = |
|
Q |
др |
|
. |
|||
Sп |
|
|
н |
|
|
|
|
|
Sп |
|
|
|
ρ Sп |
|
|||
Из полученной формулы видно, что, действительно, величина скорости движения выходного звена в таком гидроприводе регулируется в результате изменения площади проходного сечения регулируемого гидро-
дросселя Sдр.
Основными характеристиками регулируемых гидроприводов являют-
ся регулировочная и нагрузочная (механическая) характеристики.
Регулировочная характеристика – это графическая зависимость ре-
гулируемой величины от параметра регулирования (в данном случае V = f (Sдр )) при постоянном значении внешней нагрузки.
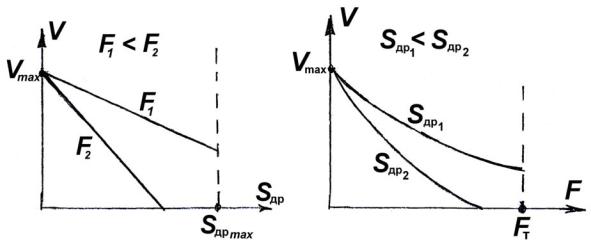
Регулировочная характеристика объемного гидропривода с дроссельным регулированием при параллельном включении дросселя приведена на рис. 7.4,а.
198
а) |
б) |
Рис. 7.4. Регулировочная (а) и нагрузочная (б) характеристики гидропривода с дроссельным регулированием скорости при параллельном включении дросселя
Из этого графика, построенного в соответствии с формулой (7.6) в диапазоне изменения площади проходного сечения гидродросселя от нуля до Sдр max, видно, что вторым фактором, оказывающим существенное влияние на величину скорости поршня гидроцилиндра, является величина преодолеваемой им внешней нагрузки F.
Графическая зависимость регулируемой величины (скорости) от величины внешней преодолеваемой нагрузки (в данном случае V = f (F ))
при постоянном значении параметра регулирования получила название
"нагрузочная", или "механическая характеристика".
Нагрузочная характеристика объемного гидропривода с дроссельным регулированием при параллельном включении дросселя приведена на рис. 7.4,б. Она построена для двух значений Sдр в соответствии с формулой (7.6) в диапазоне изменения нагрузки от нуля до так называемого тормозного усилия Fт, величина которого определяется давлением настройки предохранительного клапана 2.
В рассматриваемом гидроприводе давление pн на выходе насоса 1 зависит от нагрузки F и не является постоянной величиной, поэтому гидропривод с такой системой регулирования скорости называют гидроприво-
дом с переменным давлением питания. Клапан 2, установленный в гид-
росистеме на выходе насоса, в этом случае является предохранительным. Одним из недостатков таких гидроприводов является то, что в них
система регулирования позволяет управлять скоростью только в случае, если направление действия внешней нагрузки противоположно направлению движения выходного звена гидропривода (нагрузка создает сопротивление движению выходного звена). Этот недостаток исключает использование данного способа регулирования скорости в гидроприводах, где, например, по условию технологического процесса необходимо обеспечить в
199
какой-то момент времени уменьшение скорости движения поршня гидроцилиндра, нагруженного некоторой массой. В этом гидроприводе уменьшение скорости будет происходить со значительным запаздыванием, так как на поршень гидроцилиндра будет действовать помогающая нагрузка (сила инерции), направление действия которой совпадает с направлением движения поршня.
7.2.2. Гидропривод с дроссельным регулированием скорости при последовательном включении дросселя
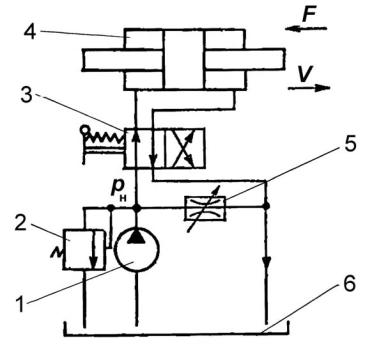
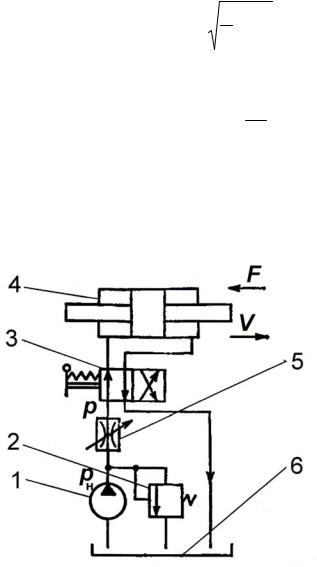
На рис. 7.5 приведена принципиальная схема гидропривода с дроссельным регулированием скорости при последовательном включении дросселя 5 на входе в гидродвигатель (гидроцилиндр 4).
Так как гидродроссель 5 и гидроцилиндр 4 включены последовательно, то расход Qг, поступающий в гидроцилиндр 4, равен расходу, проходящему через регулируемый гидродроссель 5, то есть:
Q = Q = µS |
2 |
∆p |
|
, |
(7.7) |
г др |
др ρ |
|
др |
|
|
где ∆pдр – перепад давления на гидродросселе 5, с учетом принятых допущений
∆pдр = pн − p = pн − F ,
Sп
pн – давление на выходе насоса; поддерживается постоянным при помощи переливного клапана 2;
p– давление в левой полости гидроцилиндра 4 (на выходе из регулируемого дросселя 5); определяется внешней нагрузкой F на штоке гидроцилиндра 4.
Рис. 7.5. Гидропривод с дроссельным регулированием скорости при последовательном включении дросселя на входе в гидродвигатель
200