

Шейпак А.А. Гидравлика и гидропневмопривод (часть 2)
.pdfДля насоса
|
|
|
|
|
|
|
|
|
|
|
|
|
µ ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
p |
|
2 |
||||||
|
|
|
k |
y |
= (1 − η |
o |
) |
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
k |
ж |
= |
|
|
|
k |
y |
|
|
|
|
, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
|
|
µ ω |
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
k |
c |
= |
|
|
1 |
− 2 k |
y |
|
|
|
|
|
|
|
|
−1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
µ ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
для гидромотора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
1 |
|
|
|
µ ω |
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
||||||||
k |
y |
= |
|
|
-1 |
|
|
|
|
|
|
|
, k |
ж |
|
|
= η k |
y |
|
|
|
, |
k |
c |
=1 |
− η |
1 |
+ 2 |
k |
y |
|
|
|
|
. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
ηo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ ω |
|
|
|
|||||
Формулы общей теории подобия роторных гидромашин (5.28) – (5.31) дают достаточно хорошие совпадения с экспериментальными данными при работе на максимальных рабочих объемах (е = 1) и отклонении давления р и скорости ω от оптимального режима на ± 50 %. При более существенном отклонении эксплуатационных параметров от этого режима, и особенно при регулировании (уменьшение параметра регулирования е), эти отклонения будут весьма значительными, поэтому формулы (5.28) – (5.31) использовать нецелесообразно.
В этом случае следует воспользоваться более точными математическими зависимостями, которые могут быть получены при уточнении формул общей теории подобия гидромашин. Суть всех этих уточнений в том, что кроме зазоров, потери энергии в которых могут быть приведены к одному эквивалентному зазору, в гидромашине существуют другие виды потерь и их следует учитывать при вычислении КПД.
Таких уточнений было предложено достаточно много, но наиболее целесообразными для использования считаются уточнения Городецкого К.И. Они дополнительно учитывают следующие положения:
1. Толщина эквивалентного зазора δ не всегда пропорциональна характерному размеру гидромашины D.
2. Кроме потерь на жидкостное трение, в общей теории подобия дополнительно следует учитывать потери жидкостного трения, величина которых пропорциональна параметру регулирования е.
3. Кроме потерь на сухое трение, в общей теории подобия дополнительно следует учитывать потери на сухое трение, независимые от давления.
4. Следует учитывать переменность коэффициента трения при изменении относительной скорости между трущимися поверхностями.
После введения этих уточнений формулы для оценки КПД роторных гидромашин существенно усложняются. Это усложнение может быть учтено, если постоянные ранее коэффициенты kж, kс и kу сделать переменными. В соответствии с вышеотмеченными уточнениями коэффициенты kж,
kс и kу должны быть переменными и вычисляться по формулам: |
|
||||||||||
′ |
+ cж e |
2 |
)+ |
|
|
kп |
|
1 |
|
, |
(5.32) |
kж = kж D (1 |
|
1 |
+ сп ω D |
µ ω |
|
||||||
|
|
|
|
|
|
|
|||||
141
|
|
|
k′ |
(5.33) и |
|
ky′ |
|
|
ω |
|
|
(5.34) |
|
|
|
|
c |
|
|
|
|
|
|
|
|
||
kc = |
1 |
+ сc ω D |
|
ky = |
2 |
1 |
+cy |
|
|
, |
|
||
|
|
|
D |
|
|
|
ωmax |
|
|
||||
где ωmax – максимальная скорость вращения гидромашины.
В таблице 5.1 приведены опытные значения этих коэффициентов, полученных авторами на основании данных по отечественным и зарубежным гидромашинам.
Таблица 5.1
Коэффи- |
k'ж |
сж |
kп |
сп |
k'с |
сс |
k'у |
cу |
|
циенты |
|||||||||
потерь |
|
|
|
|
|
|
|
|
|
Размер- |
107·м-1 |
- |
МПа |
с/м |
- |
с/м |
10-11·м2 |
- |
|
ность |
|
|
|
|
|
|
|
|
|
Насосы ак- |
|
|
|
|
0,01- |
0,02- |
0,15- |
|
|
сиально- |
0,1-0,6 |
0,6-2.5 |
0,5-3,5 |
0,5-5,0 |
2,5-6 |
||||
0,08 |
0,1 |
0,6 |
|||||||
поршневые |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
Гидромо- |
|
|
|
|
0,01- |
0,02- |
0,15- |
|
|
торы |
0,1-0,6 |
~ 1 |
~ 1 |
0,5-5,0 |
3-5 |
||||
аксиально- |
0,08 |
0,1 |
0,6 |
||||||
поршневые |
|
|
|
|
|
|
|
|
|
Насосы ра- |
|
|
|
|
0,03- |
|
0,15- |
|
|
диально- |
0,1-0,2 |
- |
0,3-0,5 |
0,1-0,2 |
~ 0 |
1-2 |
|||
0,08 |
0,2 |
||||||||
поршневые |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
Насосы |
|
|
|
|
0,05- |
0,01- |
0,05- |
0,1- |
|
шестерен- |
0,1-0,3 |
- |
0,4-1,0 |
3-5 |
|||||
0,2 |
0,04 |
0,2 |
0,5 |
||||||
ные |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
Гидромо- |
|
|
|
|
0,05- |
0,01- |
0,05- |
|
|
торы шес- |
0,1-0,3 |
- |
0,4-1,0 |
3-4 |
~ 0,1 |
||||
0,2 |
0,04 |
0,2 |
|||||||
теренные |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Использование уточненных формул теории подобия роторных гидромашин затруднено сложностью определения коэффициентов потерь k'ж, сж, kп, сп, k'с, сс, k'у и k'у. Для их вычисления необходим значительный объем экспериментальных данных по каждой гидромашине. Однако, учитывая разное влияние коэффициентов на точность вычисления КПД, для их определения можно использовать упрощенную методику. Для этого необходимы паспортные данные на гидромашину. По изложенной выше методике и с учетом паспортных данных гидромашины следует определить коэффициенты kж, kс и kу общей теории подобия. Далее, используя данные таблицы 5.1, следует задаться коэффициентами сж, kп, сп, сс, и су. На последнем этапе, используя формулы (5.32)-(5.34), найти оставшиеся коэффициенты k'ж, k'с и k'у.
142
5.10. Гидроаккумуляторы
Гидроаккумулятор – это устройство, предназначенное для аккумулирования энергии рабочей жидкости, находящейся под давлением, с целью последующего возврата ее в гидросистему.
Для накопления и сохранения энергии давления потока рабочей жидкости в гидроаккумуляторе осуществляется ее преобразование в механическую энергию другого вида, поэтому гидроаккумуляторы относятся к энергопреобразователям.
Основным назначением гидроаккумуляторов является накопление энергии рабочей жидкости в периоды пауз или малого ее потребления гидроагрегатами гидросистемы и возврат этой накопленной энергии в периоды их интенсивной работы. В этом случае гидроаккумулятор подключается к напорной гидролинии и работает параллельно насосу.
Кроме того, гидроаккумулятор может выполнять функцию гасителя колебаний давления в гидросистемах, а также применяться для поддержания постоянного давления в сливной или всасывающей гидролинии. В последнем случае гидроаккумуляторы называются подпорными гидроаккуму-
ляторами низкого давления.
Применение гидроаккумуляторов позволяет в гидросистемах существенно уменьшить рабочий объем используемого насоса. Особенно целесообразно применять аккумуляторы в гидросистемах с эпизодическими пиками потребляемого расхода, которые, возможно, значительно превышают средний расход жидкости в гидросистеме.
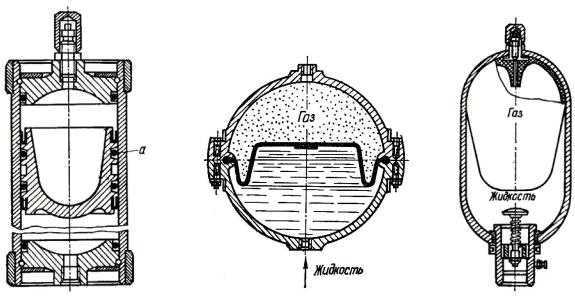
В зависимости от типа механической энергии, которую накапливает гидроаккумулятор, различают:
•грузовые гидроаккумуляторы (рис. 5.22,а), в которых аккумули-
рование и возврат энергии происходит за счет изменения потенциальной энергии груза. Важным свойством грузового гидроаккумулятора является независимость давления жидкости в нем от степени заполнения жидкостью (давление зависит от веса груза). Эти гидроаккумуляторы имеют низкую энергоемкость, высокую инерционность; очень громоздкие, поэтому используются редко;
•пружинные гидроаккумуляторы (рис. 5.22,в), в которых аккуму-
лирование и возврат энергии происходит за счет изменения энергии упругости деформируемой пружины. Эти гидроаккумуляторы могут накапливать небольшие объемы жидкости при малом давлении, что обусловлено ограниченными возможностями механических пружин;
•гидроаккумуляторы с упругим корпусом (рис. 5.22,б), в которых аккумулирование и возврат энергии происходит за счет изменения энергии упругости деформируемого корпуса, например сильфона. Эти гидроаккумуляторы имеют те же недостатки, что и пружинные;
•пневмогидроаккумуляторы (рис. 5.22,г), в которых аккумулиро-
вание и возврат энергии происходит за счет изменения энергии сжатого га-
143

за. Благодаря наибольшей энергоемкости при малых габаритах такие гидроаккумуляторы получили широкое распространение.
а) |
б) |
в) |
г) |
Рис. 5.22. Гидравлические аккумуляторы:
а) грузовой; б) с упругим корпусом; в) пружинный; г) пневмогидроаккумулятор без разделителя сред
На рис. 5.22 рядом с соответствующими конструктивными схемами гидроаккумуляторов приведены их условные обозначения на схемах (пружинный и гидроаккумулятор с упругим корпусом имеют одинаковое условное обозначение).
Пневмогидроаккумуляторы бывают:
а) без разделителя сред (см. рис. 5.22,г). В них рабочая жидкость находится в непосредственном контакте с газом (чаще всего азотом). Такие аккумуляторы малоинерционны, просты по конструкции, в них практически отсутствуют потери энергии. Однако их серьезным недостатком является то, что газ, контактируя со свободной поверхностью рабочей жидкости под высоким давлением, растворяется в ней и ухудшает ее свойства. Кроме того, объем газа по мере его растворения уменьшается, в результате чего возникает необходимость в периодической подзарядке такого пневмогидроаккумулятора рабочим газом;
б) с разделителем сред (рис. 5.23). В них рабочая жидкость отделена от рабочего газа специальным разделителем. По конструкции разделителя такие гидроаккумуляторы делят на три типа:
•поршневые (рис. 5.23,а) – с разделителем в виде поршня;
•мембранные (рис. 5.23,б) – с разделителем в виде резиновой диафрагмы;
•баллонные (рис. 5.23,в) – с разделителем в виде эластичного бал-
лона.
144
а) |
б) |
в) |
Рис. 5.23. Пневмогидроаккумуляторы с разделителями сред: а) поршневой; б) мембранный; в) баллонный
Поршневые аккумуляторы имеют недостаток, обусловленный наличием трения поршня о цилиндр. В результате до 15% аккумулируемой энергии теряется на преодоление этих сил трения. К тому же, поршневые пневмогидроаккумуляторы достаточно инерционны.
Эти недостатки практически полностью отсутствуют у мембранных и баллонных пневмогидроаккумуляторов. Силы, затрачиваемые на деформацию диафрагмы или баллона, в этих аккумуляторах малы, и такие гидроаккумуляторы можно считать практически безынерционными.
Поршневые аккумуляторы всегда имеют форму цилиндра, а мембранные и баллонные чаще делают округлой формы или в виде сферы. Аккумуляторы сферической формы отличаются компактностью и малым весом. Это обусловлено особенностями сферических форм: поверхность сферы при том же объеме меньше, чем у других форм, а напряжения, возникающие в стенках под действием давления, в два раза меньше, чем в стенках цилиндра того же диаметра.
Расчет пневмогидроаккумулятора включает определение его общего (конструктивного) объема wк, давления зарядки газом pзар и расчет на прочность его корпуса.
Под давлением зарядки газом pзар понимается давление газа внутри пневмогидроаккумулятора, когда в нем отсутствует жидкость (всю полость Wк занимает сжатый газ).
Под конструктивным объемом Wк пневмогидроаккумулятора понимается объем его внутренней полости. Для полностью заряженного аккумулятора жидкостью этот объем равен:
Wк = Wг min + Wпол + Wзап, |
(5.35) |
145
где Wг min – минимальный объем, занимаемый газом, при максимальном давлении pmax внутри аккумулятора;
Wпол – полезный объем пневмогидроаккумулятора – это объем жидко-
сти, который поступает в гидросистему из аккумулятора в процессе разрядки, а именно: при изменении в нем давления от максимального рабоче-
го pmax до минимального pmin;
– объем запаса, который на основании практического опыта обычно выбирают в диапазоне 3…5% от Vпол.
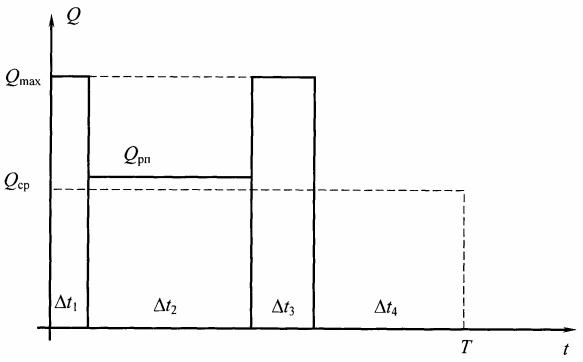
На первом этапе расчета определяют полезный объем пневмогидроаккумулятора Wпол. Для этого, например, можно воспользоваться гистограммой потребляемого гидросистемой расхода рабочей жидкости. Пример ее приведен на рис. 5.24.
Рис. 5.24. Пример гистограммы потребляемого гидросистемой расхода
Подобная гистограмма может, например, характеризовать изменение величины расхода, потребляемого гидроприводом суппорта металлорежущего станка-автомата в рабочем цикле T : быстрый подвод инструмента – ∆t1 ; рабочая подача – ∆t2 ; быстрый отвод инструмента – ∆t3 ; время ожи-
дания ∆t4 . Пусть этот цикл постоянно повторяется. Если в таком гидро-
приводе не используется пневмогидроаккумулятор, то насос выбирается по величине максимального потребляемого расхода Qmax. Использование пневмогидроаккумулятора позволяет выбирать насос по средней величине потребляемого гидросистемой расхода Qср, величина которого в данном случае равна:
Q |
= Qmax ∆t1 +Qрп ∆t2 +Qmax ∆t3 |
|
|
ср |
|
T |
. |
|
|
||
146
Очевидно, что при этом полезный объем Wпол пневмогидроаккумулятора равен:
Vпол = Qср ∆t4 .
Далее при известном диапазоне рабочих давлений pmax…pmin в пневмогидроаккумуляторе, принимая закон изменения газового состояния по-
литропическим ( pV n = const), можно записать: |
|
pзар Wnк = рmax Wnг min = pmin (Wг min + Wпол)n, |
(5.36) |
где n – показатель политропы газа.
Из этой системы двух уравнений, используя выражение (5.35) для конструктивного объема Wк пневмогидроаккумулятора, определяются неизвестные величины pзар и Wк.
На основании полученных расчетных величин из каталога выбирается пневмогидроаккумулятор, предназначенный для работы в требуемом диапазоне рабочих давлений и имеющий ближайший больший конструктивный объем. После этого, используя систему уравнений (5.36), уточняются максимальное рабочее давление pmax и давление зарядки газом pзар.
Следует отметить, что при монтаже гидросистемы, в которой используется пневмогидроаккумулятор, необходимо предусмотреть защитный каркас с металлической сеткой, укрывающий пневмогидроаккумулятор. Эта сетка в случае возникновения аварийной ситуации улавливает осколки корпуса пневмогидроаккумулятора, практически не создавая сопротивления для газа.
147
Глава 6 ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ
(ГИДРОАППАРАТЫ)
6.1. Основные термины, определения и параметры
Приведенные ниже термины и определения даны в соответствии с ГОСТ 17752-81.
По характеру выполнения своих функций все гидроаппараты делятся на регулирующие и направляющие.
Регулирующим называется гидроаппарат, в котором изменение соответствующего параметра потока рабочей жидкости происходит за счет частичного открытия или перекрытия проходного сечения в нем.
Направляющим называется гидроаппарат, который изменяет направление потока рабочей жидкости путем полного открытия или полного перекрытия проходного сечения в нем.
Под площадью проходного сечения гидроаппарата понимается минимальное значение площади живого сечения потока (выбранного нормально скорости жидкости) в нем. Эта площадь сечения определяет расход рабочей жидкости, проходящей через гидроаппарат.
Основным элементом гидроаппарата является запорно-регулирующий элемент – это деталь или группа деталей, при перемещении которых частично или полностью перекрывается проходное сечение гидроаппарата.
По конструкции запорно-регулирующего элемента гидроаппараты делятся на:
•золотниковые, в которых запорно-регулирующим элементом явля-
ется цилиндрический (рис. 6.1,а) или плоский (рис. 6.1,б) золотник;
•крановые, в которых запорно-регулирующим элементом является
плоский (рис. 6.1,в), цилиндрический (рис. 6.1,г), конический (рис. 6.1,д) или сферический (рис. 6.1,е) кран;
•клапанные, в которых запорно-регулирующим элементом является
шариковый (рис. 6.1,ж), конусный (рис. 6.1,з), игольчатый (рис. 6.1,и) или плоский (тарельчатый) (рис. 6.1,к) клапан;
По способу перенастройки гидроаппараты делятся на регулируемые и настраиваемые.
Регулируемым называется гидроаппарат, в котором величина открытия проходного сечения или силовое воздействие на запорно-регули- рующий элемент могут быть изменены по сигналу извне во время работы гидросистемы.
Настраиваемым называется гидроаппарат, характеристики которого могут быть изменены только в условиях выключенной гидросистемы. Часто при этом бывает необходима разборка гидроаппарата или гидросистемы.
148

а) б)
в) |
г) |
д) |
е) |
ж) |
з) |
и) |
к) |
Рис. 6.1. Запорно-регулирующие элементы гидроаппаратов: а) золотник цилиндрический; б) золотник плоский;
в) кран плоский; г) кран цилиндрический; д) кран конический; е) кран сферический; ж) клапан шариковый; з) клапан конусный; и) клапан игольчатый; к) клапан плоский (тарельчатый)
По способу подключения гидроаппараты делятся на:
•гидроаппараты трубного присоединения – соединяются с другими гидравлическими устройствами при помощи трубопроводов и рукавов;
•гидроаппараты стыкового присоединения – соединяются с други-
ми гидравлическими устройствами при помощи каналов, выведенных на наружную плоскость, по которой происходит стыковка с другими гидравлическими устройствами;
•гидроаппараты модульного исполнения – соединяются с другими гидравлическими устройствами при помощи вертикальных каналов, выведенных на две параллельные наружные плоскости с одинаковыми координатами присоединительных отверстий;
•встраиваемые – эти гидроаппараты, как правило, не имеют корпусов. Их монтируют в специальных монтажных гнездах гидравлических блоков, соединенных с соответствующими каналами.
На рис. 6.2 в качестве примера приведен блок гидроаппаратов модульного исполнения. В состав блока входят напорные клапаны 2 и 9, гидрозамки 3 и 7, дроссель с обратным клапаном 4, распределители 5 и 8, регулятор расхода 6, крепежные, монтажные и переходные плиты 1, 10-18.
149
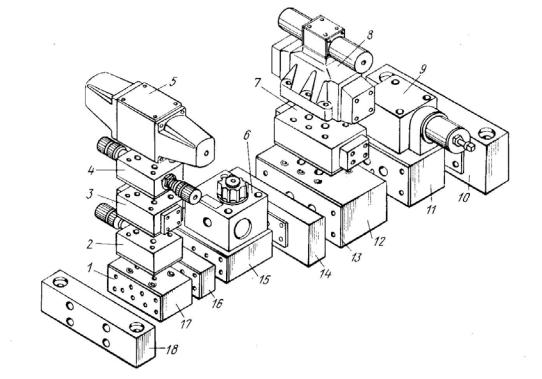
Рис. 6.2. Блок гидроаппаратов модульного исполнения
Применение гидроагрегатов модульного исполнения позволяет предельно сократить число трубопроводов, повышает уровень унификации. Вместе с тем габариты монтажного блока увеличиваются из-за большого числа переходных плит и сквозных каналов. До настоящего времени номенклатура гидроаппаратов модульного исполнения ограничена.
Присоединительные отверстия на принципиальных и полуконструктивных схемах гидроаппаратов в соответствии с ГОСТ 24242-80 обозначают прописными буквами латинского алфавита:
•Р – отверстие для подвода рабочей жидкости под давлением;
•А и В – отверстия для присоединения к другим гидравлическим устройствам;
•Т – отверстие для отвода рабочей жидкости в гидробак;
•X и Y – отверстия для потоков управления;
•L – отверстие для дренажного отвода жидкости.
К основные параметры гидроаппаратов (эти параметры, как прави-
ло, приводятся в каталогах и паспортах гидроаппаратов) относятся следующие.
Главным параметром всех гидроаппаратов является их условный проход Dy, под которым понимается диаметр условного отверстия, площадь которого равна максимальному значению проходного сечения гидроаппарата.
Последовательность значений Dy регламентирует ГОСТ 16516-80. Типоразмерные ряды всех гидроаппаратов строятся по их условным проходам.
150