

8. Электромагнитные ип.
Электромагнитные ИП состоят из одной или нескольких катушек. На практике наиболее широко применяются индуктивные, трансформаторные, индукционные и магнитоупругие ИП.
8.1. Индуктивные ип
8.1.1. Принцип действия, конструкции, достоинства и недостатки
Принцип действия индуктивных ИП основан изменении собственной индуктивности катушки.
В общем случае индуктивный преобразователь состоит из катушки индуктивности, магнитопровода и подвижного ферромагнитного сердечника (якоря). Входная величина Х изменяет взаимное расположение катушки и якоря, или отдельных частей магнитопровода. При этом изменяется индуктивность катушки и ее полное сопротивление.
На рис. 8.1 представлены различные варианты конструктивного исполнения индуктивных ИП: с переменной длиной воздушного зазора (рис. 8.1 а); с переменной площадью воздушного зазора (рис. 8.1 б); соленоидальный (рис. 8.1 в); с распределенными параметрами (рис. 8.1 г).
В преобразователях с переменной длиной или площадью воздушного зазора (рис. 8.1 а, б) входная величина вызывает перемещение Х якоря 2. В результате этого изменяется магнитное сопротивление системы, что приводит к изменению индуктивности катушки 1, размещенной на магнитопроводе 3.
Соленоидальные индуктивные ИП представляют собой преобразователи с разомкнутой магнитной цепью (рис. 8.1 в) и работают на принципе изменения магнитного сопротивления участков рассеяния магнитного потока при перемещении якоря 2.
В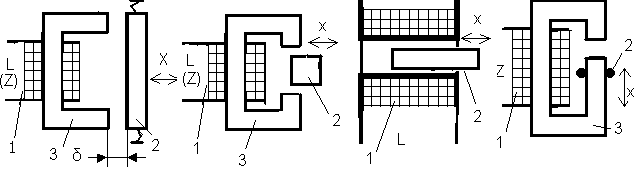 преобразователях с распределенными
параметрами (рис. 8.1 в) изменение
магнитного сопротивления происходит
вследствие размагничивающего действия
вторичных токов. В таких индуктивных
ИП вместо ферромагнитного якоря
перемещается короткозамкнутый виток
2 (рис. 8.1 г). При этом в витке индуцируются
токи, которые создают потери, что приводит
к появлению дополнительного реактивного
сопротивления магнитной цепи. Вместо
витка в зазор магнитопровода можно
вводить электропроводный элемент
(например, диск из меди или алюминия),
в котором наводятся вторичные токи.
преобразователях с распределенными
параметрами (рис. 8.1 в) изменение
магнитного сопротивления происходит
вследствие размагничивающего действия
вторичных токов. В таких индуктивных
ИП вместо ферромагнитного якоря
перемещается короткозамкнутый виток
2 (рис. 8.1 г). При этом в витке индуцируются
токи, которые создают потери, что приводит
к появлению дополнительного реактивного
сопротивления магнитной цепи. Вместо
витка в зазор магнитопровода можно
вводить электропроводный элемент
(например, диск из меди или алюминия),
в котором наводятся вторичные токи.
а) б) в) г)
Рис. 8.1
Наиболее распространенными являются преобразователи с переменной длиной воздушного зазора. Рассмотрим их работу.
Входная неэлектрическая величина Х изменяет взаимное расположение катушки 1, намотанной на магнитопровод 3 и подвижного якоря 2. При этом изменяется длина воздушного зазора и магнитное сопротивление системы, что при-водит к изменению индуктивности катушки 1, которая определяется по формуле
L = n2/RМ, (8.1)
где n - число витков катушки; RМ - магнитное сопротивление ИП.
Пренебрегая рассеянием магнитного поля и нелинейностью кривой намагничивания материала магнитопровода и якоря, получим выражение для магнитного сопротивления в виде
RМ = RСТ + RЗ = lСТ/(r 0 QСТ) + 2/(0 Q), (8.2)
где RСТ – магнитное сопротивление участков магнитопровода и ферромагнитного сердечника; RЗ – магнитное сопротивление воздушных зазоров; lСТ - длина средней силовой линии по магнитопроводу и якорю; QСТ - поперечное сечение магнитопровода и якоря (магнитопровод и якорь имеют одинаковую площадь поперечного сечения); r – магнитная проницаемость материала магнитопровода и якоря; 0 - магнитная постоянная; - длина воздушного зазора; Q – сечение воздушного зазора.
Выполнив условие QСТ = Q, получим
L = 0 Q n2/(lСТ/r + 2). (8.3)
Переходя к сопротивлению катушки индуктивности и пренебрегая активным сопротивлением катушки, получим
Z() = iL = i0 Q n2/(lСТ/r + 2). (8.4)
Учитывая, что 2 >> lСТ/r (так как r - велико), получим
L 0 Q n2/(2); Z i0 Q n2/2. (8.5)
К достоинствам индуктивных ИП можно отнести:
1) большой диапазон измеряемых линейных и угловых перемещений;
2) большую мощность выходного сигнала (до 5 Вт), что позволяет обойтись без дополнительного усиления;
3) высокую чувствительность;
4) надежность;
5) возможность питания от сети (для многих случаев).
Недостатками индуктивных ИП являются:
1) большая инерционность;
2) наличие электромагнитных сил притяжения.