

4. Электромеханические приборы прямого преобразования
4.1. Структурная схема и уравнение преобразования
В общем случае электромеханические приборы состоят из измерительной цепи, измерительного механизма, отсчетного устройства и строятся по структурной схеме прямого преобразования, представленной на рис. 4.1 [6].


Х Измерительная Х1 Измерительный Отсчетное

 цепь
механизм устройство
цепь
механизм устройство
Рис. 4.1
Измерительная цепь преобразует измеряемую величину Х в электрическую величину Х1, непосредственно воздействующую на измерительный механизм.
Измерительный механизм (ИМ) состоит из неподвижной и подвижной частей. В ИМ электромагнитная энергия преобразуется в механическую энергию перемещения подвижной части. Под действием измеряемой величины в измерительном механизме создается вращающий момент МВР, поворачивающий подвижную часть ИМ. В общем случае вращающий момент зависит от измеряемой величины Х и угла поворота подвижной части : МВР = f(X, ). Для электромеханических приборов вращающий момент находится как
МВР = dWe /d, (4.1)
где We - энергия электромагнитного поля, сосредоточенная в измерительном механизме.
Для того чтобы каждому значению измеряемой величины соответствовало определенное значение угла отклонения подвижной части, в измерительном механизме при повороте подвижной части создается противодействующий момент МПР, направленный навстречу вращающему и зависящий от угла поворота. При механическом создании противодействующего момента МПР = W, где W - удельный противодействующий момент. Из условия установившегося равновесия
МВР = МПР = dWe /d = W, (4.2)
получим, что угол поворота подвижной части зависит от измеряемой величины, параметров прибора и может быть найден как
= F(X, A) = [dWe /d]/ W, (4.3)
где А - параметры измерительного механизма.
Уравнение (4.3) называется уравнением преобразования измерительного механизма электромеханического прибора [8].
Противодействующий момент в измерительных механизмах может создаваться не только механическим путем (пружинами, растяжками), но и самой измеряемой величиной. Механизмы, в которых противодействующий момент создается измеряемой величиной, называются логометрами.
Отсчетное устройство служит для визуального отсчитывания значений измеряемой величины и состоит из шкалы и указателя.
По форме шкалы делятся на: прямолинейные, дуговые и круговые (угол дуги больше 1800); по соотношению длин делений в пределах одной шкалы они разделяются на: равномерные и неравномерные, когда отношение длины наибольшего деления к наименьшему (коэффициент неравномерности шкалы) превышает 1,3; по числу шкал: одношкальные и многошкальные [6].
Шкалы и все надписи, характеризующие прибор, наносятся на основание (циферблат) и нормируются ГОСТ 5365- 83.








 На
шкалах электромеханических приборов
наносятся следующие условные обозначения:
а) обозначение рода тока (например, "
__ " - ток постоянный; " ~
" - ток переменный; " ~ " - ток
постоянный и переменный; б) обозначение
единицы измеряемой величины (например,
mA, B); в)
обозначение рабочего положения прибора:
- для горизонтального положения
шкалы; - прибор
применять в вертикальном положении
шкалы; 0
- для установления под углом 0;
г) обозначение класса точности (например,
1,5; 2,5 ; 1,5 ); обозначение испытательного
напряжения изоляции измерительной цепи
по отношению к корпусу, например, 2
- испытательное напряжение,
например, 2 кВ. Кроме этого на шкале
приводится условное изображение
принципа действия и буквенное обозначение
прибора. В таблице 4.1 приведены условные
обозначения некоторых типов приборов
[9].
На
шкалах электромеханических приборов
наносятся следующие условные обозначения:
а) обозначение рода тока (например, "
__ " - ток постоянный; " ~
" - ток переменный; " ~ " - ток
постоянный и переменный; б) обозначение
единицы измеряемой величины (например,
mA, B); в)
обозначение рабочего положения прибора:
- для горизонтального положения
шкалы; - прибор
применять в вертикальном положении
шкалы; 0
- для установления под углом 0;
г) обозначение класса точности (например,
1,5; 2,5 ; 1,5 ); обозначение испытательного
напряжения изоляции измерительной цепи
по отношению к корпусу, например, 2
- испытательное напряжение,
например, 2 кВ. Кроме этого на шкале
приводится условное изображение
принципа действия и буквенное обозначение
прибора. В таблице 4.1 приведены условные
обозначения некоторых типов приборов
[9].
Для определения показаний прибора по отметкам шкалы используются стрелочные и световые указатели.
При работе электромеханического прибора в динамическом режиме, кроме вращающего и противодействующего моментов возникают моменты, обусловленные инерцией, сопротивлением окружающей среды, вихревыми токами. При движении подвижной части в приборе возникает динамический момент, стремящийся успокоить это движение и называющийся успокаивающим моментом. Этот момент определяет время успокоения прибора. Для получения требуемого времени успокоения в измерительном механизме выполняется специальный конструктивный элемент - успокоитель. В электромеханических приборах применяют воздушные, жидкостные и магнитоиндукционные успокоители [8].
В зависимости от принципа действия измерительного механизма электромеханические приборы разделяются на следующие группы: магнитоэлектрические, электромагнитные, электродинамические, ферродинамические, электростатические, индукционные.
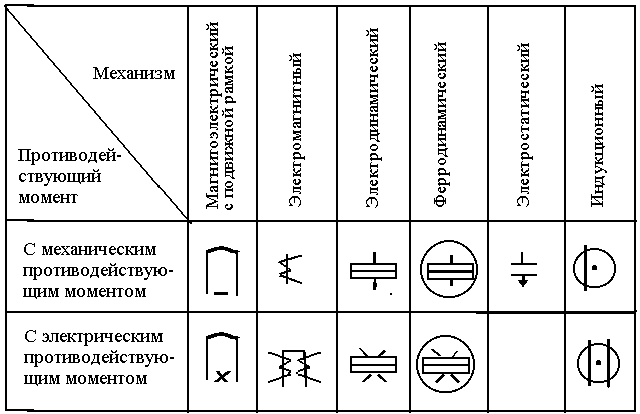 Таблица 4.1
Таблица 4.1