

4.2. Основные характеристики электромеханических приборов.
К основным характеристикам электромеханических приборов относятся: точность, диапазон измерений, чувствительность, время успокоения, надежность, собственное потребление мощности и др.
Показателями точности электромеханических приборов кроме основной погрешности являются также вариация показаний и невозвращение указателя к отметке механического нуля.
Вариация показаний определяется как разность показаний прибора (при одном и том же значении измеряемой величины) при плавном подходе указателя к испытуемой отметке сначала со стороны начальной, а затем конечной отметки шкалы. Причиной появления вариации может служить трение в опорах подвижной части. Для большинства приборов вариация не должна превышать абсолютного значения допускаемой основной погрешности.
Невозвращение указателя к отметке механического нуля определяется при плавном подводе указателя к этой отметке от наиболее удаленной от нее отметки шкалы. Причиной невозвращения к нулю является упругое последействие растяжек или спиральных пружин.
Временем успокоения подвижной части измерительного механизма называется промежуток времени, прошедший с момента изменения измеряемой величины до момента, когда отличие показаний прибора от установившегося его показания не превысит 1 % от длины шкалы. Значение времени успокоения для большинства электромеханических приборов не должно превышать 4 с (для электростатических и термоэлектрических - 6 с).
4.3. Магнитоэлектрические приборы
Основной функциональной частью магнитоэлектрического прибора является измерительный механизм.
4.3.1. Устройство и принцип действия магнитоэлектрического им
Принцип действия магнитоэлектрических механизмов основан на взаимодействии магнитных полей постоянного магнита и катушки (рамки), по которой протекает ток.
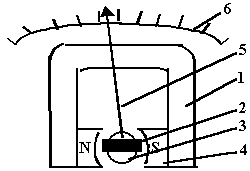
Рассмотрим устройство и работу магнитоэлектрического механизма с механическим противодействующим моментом. Конструктивно магнитоэлектрический механизм выполняется либо с подвижной катушкой, либо с подвижным магнитом. Конструкция с подвижной катушкой показана на рис. 4.2.
Магнитная система измерительного механизма состоит из постоянного магнита 1, магнитопровода с полюсными наконечниками 4, сердечника 3. Между полюсными наконечниками находится катушка (рамка) 2, по которой протекает ток I. Рамка соединена со стрелкой 5, перемещающейся по шкале 6. При прохождении тока I по рамке 2, помещенной в равномерное, постоянное магнитное поле с индукцией В, создается вращающий момент МВР, действующий на подвижную часть магнитоэлектрического механизма. Выражение для определения вращающего момента представляется как
МВР = dWe/d = d(I)/d = d(BnSI) /d = BnSI, (4.4)
где - потокосцепление магнитного поля постоянного магнита с рамкой; В - магнитная индукция в воздушном зазоре между полюсными наконечниками; n - число витков рамки; S - активная площадь рамки; - угол поворота рамки.
Противодействующий момент создается пружинками (на рис. 4.2 не показаны). Из равенства МВР = МПР можно получить следующее уравнение преобразования магнитоэлектрического измерительного механизма [8]:
= BnSI/W = SI I, (4.5)
где SI = BnS/W - чувствительность магнитоэлектрического механизма к току.
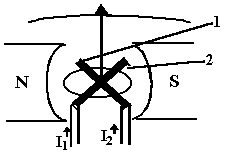
Рассмотрим магнитоэлектрический логометрический измерительный механизм, в котором противодействующий момент создается электрическим способом. В таком механизме подвижная часть выполняется в виде двух жестко скрепленных между собой рамок 1 и 2, как показано на рис. 4.3. По обмоткам рамок протекают токи I1 и I2, которые создают моменты М1 и М2. Направления токов выбираются таким образом, чтобы моменты М1 и М2 действовали навстречу друг другу. Записав выражения для моментов в виде М1 = S1n1F1()I1; М2 = S2n2F1()I2.. Считая один из моментов вращающим, например, М1, а второй М2 - противодействующим, при установившемся
равновесии выражение для угла отклонения подвижной части можно представить в виде
= F(I1/I2). (4.6)
 Из
данного выражения видно, что
магнитоэлектрический логометр измеряет
отношение токов. Логометрические
измерительные механизмы очень часто
используются в приборах для измерения
сопротивления. Показания таких приборов
не зависят от напряжения питания.
Из
данного выражения видно, что
магнитоэлектрический логометр измеряет
отношение токов. Логометрические
измерительные механизмы очень часто
используются в приборах для измерения
сопротивления. Показания таких приборов
не зависят от напряжения питания.
Рис. 4.2 Рис. 4.3