

3.2.2. Уменьшение переменных систематических погрешностей
Переменные систематические погрешности зависят от изменяющихся внешних воздействий, значения которых обычно неизвестны и для их уменьшения используются методы, основанные на использовании структурной и временной избыточности.
Метод образцовых сигналов заключается в том, что в процессе цикла измерений на вход средства измерений периодически вместо измеряемой величины Х подаются образцовые сигналы (меры) Х01, Х02, ..., Х0n (рис. 3.2). Процесс измерения состоит из n + 1 тактов. Сначала измеряют величину Х. В последующих тактах производится измерение поочередно подключаемых через коммутатор (К) к средству измерения (СИ) образцовых мер. Результаты всех


 Х
измерений Y0, Y01, Y02,
..., Y0n образуют
Х
измерений Y0, Y01, Y02,
..., Y0n образуют 
Х01 К СИ систему уравнений, из решения кото-
Х0n, рой находится значение измеряемой
Рис. 3.2 величины [2].
Например, при наличии двух образцовых сигналов для первого, второго и третьего измерений можно записать Y0 = К1 + К2 X; Y1 = К1 + К2 X 01; Y2 = К1 + К2 X 02, где К1 и К2 - коэффициенты характеристики преобразования средства измерения СИ. Решив систему уравнений, можно найти значение измеряемой величины
Х = [Х02 (Y0 - Y1) + Х01 (Y2 - Y0)] /(Y2 - Y1). (3.11)
Значение Х не зависит от изменяющихся параметров характеристики преобразования средства измерения. Метод образцовых мер позволяет уменьшить все составляющие систематической погрешности (аддитивную, мультипликативную, погрешность линейности), но только в тех точках диапазона измерений, которые соответствуют образцовым сигналам [7].
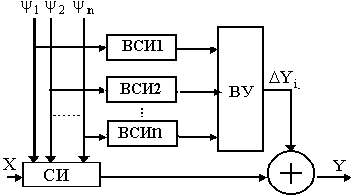
Метод вспомогательных измерений используется для исключения погрешностей от влияющих величин и неинформативных параметров измеряемого сигнала. Для реализации этого метода одновременно с измеряемой величиной Х при помощи вспомогательных средств измерений (ВСИ) (рис. 3.3) производится измерение каждой из влияющих величин i и вычисление с помощью вычислительного устройства (ВУ) поправок Yi к результатам измерения. Метод вспомогательных измерений применим для снижения влияния тех дестабилизирующих факторов, которые могут быть легко учтены, но при этом необходимо знать зависимость погрешности средства измерения от этих факторов. В качестве объектов вспомогательных измерений могут выступать и неинформативные параметры входного сигнала [2].
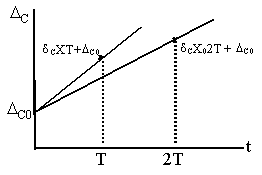
Метод симметричных наблюдений применяется для устранения прогрессирующей (мультипликативной) систематической погрешности, изменяющейся по линейному закону во времени (рис. 3.4). Он заключается в проведении многократных наблюдений через равные промежутки времени с последующим усреднением результатов измерений, симметрично расположенных относительно среднего измерения. Измерение выполняется в четыре этапа. Сначала записываются показания измерительного прибора при входном сигнале, равном нулю: Y1 = C0. Затем измеряется мера Х0. Результат измерения может быть записан как Y2 = Х0 + C0. На третьем этапе через интервал времени Т измеряется неизвестная величина Х. Результат измерения Y3 = Х + CХТ + C0 (C - относительная систематическая погрешность). Третье измерение проводится через интервал времени, равный 2Т, при этом вновь измеряется мера Х0: Y4 = Х0 + CХ02Т + C 0. Мультипликативная погрешность устраняется вычислением Х по формуле [5]
 Х = 2(Y3 -
Y1)/(Y2 + Y4 - 2Y1).
(3.12)
Х = 2(Y3 -
Y1)/(Y2 + Y4 - 2Y1).
(3.12)
Рис. 3.3 Рис. 3.4
Например, измеряется электрическое сопротивление путем сравнения падения напряжения на образцовом R0 и измеряемом RX резисторах, включенных в цепь, как показано на рис. 3.5. Для исключения погрешности, обусловленной изменением напряжения, например, разрядом батареи источника питания проводят три измерения. Первое - на образцовом резисторе R0:
R0 RХ U01 = IR0; второе - через интервал







 времени t1 на измеряемом
резисто-
времени t1 на измеряемом
резисто-



 ре RХ: UХ = (I - I1)RХ;
третье - через
ре RХ: UХ = (I - I1)RХ;
третье - через
1 2
интервал времени t2 = t1 =
Т с



 нова
нова



 на резисторе R0: U02 = (I-
I2)R0.
Ес-
на резисторе R0: U02 = (I-
I2)R0.
Ес-
 ли ток изменяется во времени по
ли ток изменяется во времени по
линейному закону, то I2 = 2I1 и


 I - I1=
(U01 +
U02)/(2R0).
Измеряемое
I - I1=
(U01 +
U02)/(2R0).
Измеряемое
Е сопротивление находится как [5]
Рис. 3.5
RX = 2R0 UX/(U01 + U02). (3.14)
Метод периодических измерений применяется в том случае, если влияющая величина, создающая систематическую погрешность, изменяется по периодическому закону. В этом случае два измерения проводят через половину периода, когда погрешность имеет противоположные знаки, но равные значения. В результате усреднения результатов измерений систематическая погрешность исключается [5].