

8.2.2. Погрешности трансформаторных ип
Погрешности трансформаторных ИП обусловлены теми же причинами, что и в индуктивных ИП. Кроме этих погрешностей трансформаторные преобразователи имеют погрешности: 1) обусловленные протеканием тока во вторичной обмотке и изменением ее сопротивления; 2) изменением тока в первичной цепи при перемещении якоря.
Для уменьшения погрешности, вызванной изменением тока в первичной цепи, необходимо включить в цепь высокоомный добавочный резистор. Уменьшение погрешности из-за тока во вторичной цепи достигается использованием измерительного прибора или вторичного преобразователя с больших входным сопротивлением.
Для улучшения характеристик трансформаторных ИП используются дифференциальные преобразователи. На рис. 8.4д показан преобразователь с подвижным сердечником. Первичные обмотки включены между собой последовательно, а вторичные включены встречно. Последовательное соединение первичных обмоток позволяет существенно уменьшить погрешность, обусловленную изменением тока в первичной цепи. При таком включении сопротивление одной первичной обмотки возрастает, а второй уменьшается примерно на ту же величину, и в целом сопротивление остается неизменным, т. е. ток в первичной цепи остается постоянным.
В дифференциальных ИП суммарная ЭДС на выходе [9]
Е2 = Е12 – Е22 = w2 O /(2 w1) [1/(O - ) – 1/(O + ) ]U~ , (8.11)
где – смещение якоря относительно его среднего положения.
При 2O 2 функция преобразования практически линейна.
Е w2 U~ /(O w1). (8.12)
Чувствительность преобразователя
S = w2 U~ /(O w1). (8.13)
Свойства дифференциальных трансформаторных ИП аналогичны свойствам дифференциальных индуктивных ИП.
8.3. Магнитоупругие ип
8.3.1. Принцип действия, конструкции магнитоупругих ип
Принцип действия магнитоупругих ИП основан на магнитоупругом эффекте и заключается в изменении магнитной проницаемости ферромагнитного материала под действием упругих деформаций.
Магнитоупругие ИП являются разновидностью индуктивных ИП с замкнутым магнитопроводом. При наличии второй обмотки он может работать как трансформаторный преобразователь [17].
 Различные
варианты выполнения магнитоупругих
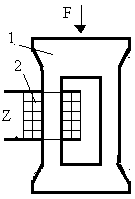
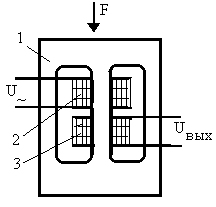
ИП показаны на рис. 8.5. При воздействии
механической силы F в
чувствительном элементе 1 возникают
механические напряжения ,
которые обусловливают изменение
магнитной проницаемости
чувствительного элемента и магнитного
сопротив-ление RM
преобразователя. При этом изменяется
индуктивность L обмотки
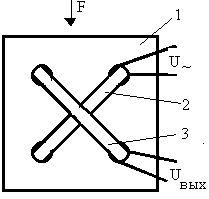
2 (рис. 8.5 а) или взаимная индуктивность
М между обмотками 2 и 3 (рис. 8.5 б, в).
Различные
варианты выполнения магнитоупругих
ИП показаны на рис. 8.5. При воздействии
механической силы F в
чувствительном элементе 1 возникают
механические напряжения ,
которые обусловливают изменение
магнитной проницаемости
чувствительного элемента и магнитного
сопротив-ление RM
преобразователя. При этом изменяется
индуктивность L обмотки
2 (рис. 8.5 а) или взаимная индуктивность
М между обмотками 2 и 3 (рис. 8.5 б, в).
а) б) в)
Рис. 8.5
В магнитоупругих преобразователях возможно использование изменения магнитной проницаемости в одном направлении (рис.8.5 а, б) и использование изменения магнитной проницаемости вследствие анизотропии магнитных свойств ферромагнитных тел при их деформации, в двух взаимно перпендикулярных направлениях. Обмотки преобразователя 2 и 3 (рис. 8.5 в), основанного на анизотропии свойств, располагаются под углом 900 друг к другу. В ненагруженном состоянии магнитные силовые линии первичной обмотки 2 не пересекают витки вторичной обмотки 3. При приложении усилия магнитные силовые линии первичной обмотки искажаются и пересекают витки обмотки 3, при этом в ней индуктируется ЭДС.
Достоинствами магнитоупругих ИП являются: 1) большая выходная мощность, так как в них все тело чувствительного элемента, воспринимающего измеряемое усилие, является активным; 2) малый прогиб под действием нагрузки; 3) малое электрическое сопротивление.