

4.7.3. Погрешности электростатических приборов
Для электростатических приборов характерны следующие погрешности: 1) температурная; 2) частотная; 3) от контактной разности потенциалов; 4) от термоЭДС; 5) от поляризации диэлектрика 6) из-за влияния внешних электростатических полей и др.
Температурная погрешность электростатического прибора обусловлена изменениями упругости материала пружин, растяжек и емкости измерительного механизма при изменении температуры.
В приборах класса точности выше 0,5 для компенсации температурной погрешности используются различные конструктивные меры, например, крепление растяжек на термобиметаллических пластинах.
Частотная погрешность обусловлена резонансными явлениями в цепи прибора (это возникает из-за наличия собственной емкости прибора и индуктивности проводов) и изменением сопротивления проводов и растяжек
Погрешность от контактной разности потенциалов возникает из-за разности работ выхода электронов с поверхности электродов в диэлектрик. Уменьшение этой погрешности достигается применением специальной технологии обработки поверхности электродов (контактная разность потенциалов уменьшается до 20-50 мВ).
Погрешность от термоЭДС обусловлена разностью температур на концах проводников, выполняемых из разнородных материалов. Данная погрешность уменьшается при снижении перепада температур в объеме измерительного механизма и выбором материалов проводников.
Погрешность от поляризации диэлектрика появляется вследствие возникновения ЭДС, обусловленной процессом поляризации. Уменьшение погрешности от поляризации достигается выбором диэлектрика с малым значением диэлектрической проницаемости и экранированием диэлектрика от подвижной пластины.
Для уменьшения влияния электростатических полей приборы экранируются. Экран соединяется с одним из зажимов прибора и заземляется.
4.8. Индукционные им и приборы на их основе
4.8.1. Устройство, принцип действия и области применения
Принцип действия индукционных измерительных механизмов заключается во взаимодействии переменного магнитного поля проводника тока и индуцированными этим полем вихревых токов в подвижном элементе.
Конструктивно индукционный измерительный механизм состоит из одного или нескольких электромагнитов и подвижной части, которая обычно выполняется в виде алюминиевого диска, укрепленного на оси. По числу магнитных потоков, пересекающих подвижную часть, они могут быть однопоточными и многопоточными. Однопоточные индукционные механизмы в измерительной технике в настоящее время не применяются [8].
Рассмотрим индукционный механизм на примере двухпоточного прибора, конструкция которого показана на рис. 4.14. Токи I1 и I2, протекающие по обмоткам электромагнитов 1 и 2, возбуждают в сердечниках магнитные потоки Ф1 и Ф2. Эти потоки, пронизывая диск 2, наводят в нем вихревые токи. Взаимодействие потоков с токами в диске создает вращающий момент, среднее значение которого может быть определено как МВР = СfФ1Ф2 sin, где C - коэффициент, определяемый материалами и конструкцией измерительного механизма; f - частота изменения потоков; - угол сдвига фаз между потоками.
Индукционные механизмы в основном используются в счетчиках электрической энергии. Рассмотрим применение индукционных измерительных механизмов на примере однофазного тангенциального счетчика электрической энергии.
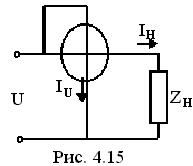
В индукционном счетчике одна обмотка одного из электромагнитов, например, 1, выполняется из небольшого числа витков относительно толстого провода и включается в цепь последовательно с нагрузкой, как показано на рис. 4.15. Обмотка электромагнита 2 имеет большое число витков тонкого провода и включается параллельно нагрузке. Ток I1 = IН в последовательной обмотке создает в сердечнике электромагнита 1 поток Ф1 = ФI. А ток I2 = IU создает в сердечнике электромагнита 2 магнитный поток ФU. Так как в счетчике на пути магнитных потоков ФI и ФU имеются большие воздушные зазоры, можно считать, что зависимость между потоками и токами II, IU линейна, т. е.
ФI = КIIH; ФU = КUIU = KU1U. (4.22)
Подставляя (4.22) в выражение для вращающего момента, получим
 МВР
= КI
KU1UIH
sin
= КUIH
sin.
(4.23)
МВР
= КI
KU1UIH
sin
= КUIH
sin.
(4.23)
В индукционных счетчиках для получения вращающего момента пропорционального активной мощности конструктивными методами добиваются выполнения условия: = /2 - , где - угол сдвига фаз между током и напряжением на нагрузке. Отсюда получим
МВР = kUIH cos = kPа, (4.24)
т. е. вращающий момент пропорционален активной мощности Ра.
Для равномерного вращения в счетчике с помощью постоянного магнита и в результате взаимодействия магнитных потоков ФI и ФU с токами в диске, индуцированными этими потоками, создается противодействующий (тормозной) момент. При равенстве вращающего и противодействующего моментов диск счетчика будет вращаться со скоростью, пропорциональной активной мощности в нагрузке.
Электрическая энергия определяется выражением
t2
W = Pdt. (4.25)
t1
В качестве устройства, выполняющего операцию интегрирования, в индукционных счетчиках используется счетные механизмы.