

1.1. Симметрия и ее элементы
Благодаря правильной, периодически повторяющейся картине расположения атомов в кристалле он обладает определенным набором элементов симметрии. Симметрией называется свойство бесконечного пространства или его конечной области (фигуры, тела) совмещаться с самим собой после выполнения некоторых преобразований или операций S, называемых операциями симметрии [2,3].
Симметрия представляет собой обобщение понятия равенства. Равными называются два тела, у которых равны расстояния между соответственными точками:
r12 = r'12 (1.3)
Условию (1.3) удовлетворяют два равных тела, различающихся положением в пространстве. Например, две одинаковые правые перчатки, которые можно совместить друг с другом параллельным переносом вдоль некоторой прямой и поворотом вокруг этой прямой (винтовым движением). В частных случаях такое совмещение может быть выполнено одним из преобразований: либо параллельным переносом, либо поворотом вокруг оси. Таким образом, движение тела без деформации представляет собой одно из симметричных преобразований. Условию (1.3) удовлетворяют, например, два тела, которые совмещаются друг с другом после отражения в зеркале (рис.3). Зеркально-симметричными являются правая и левая система координат.
а |
б |
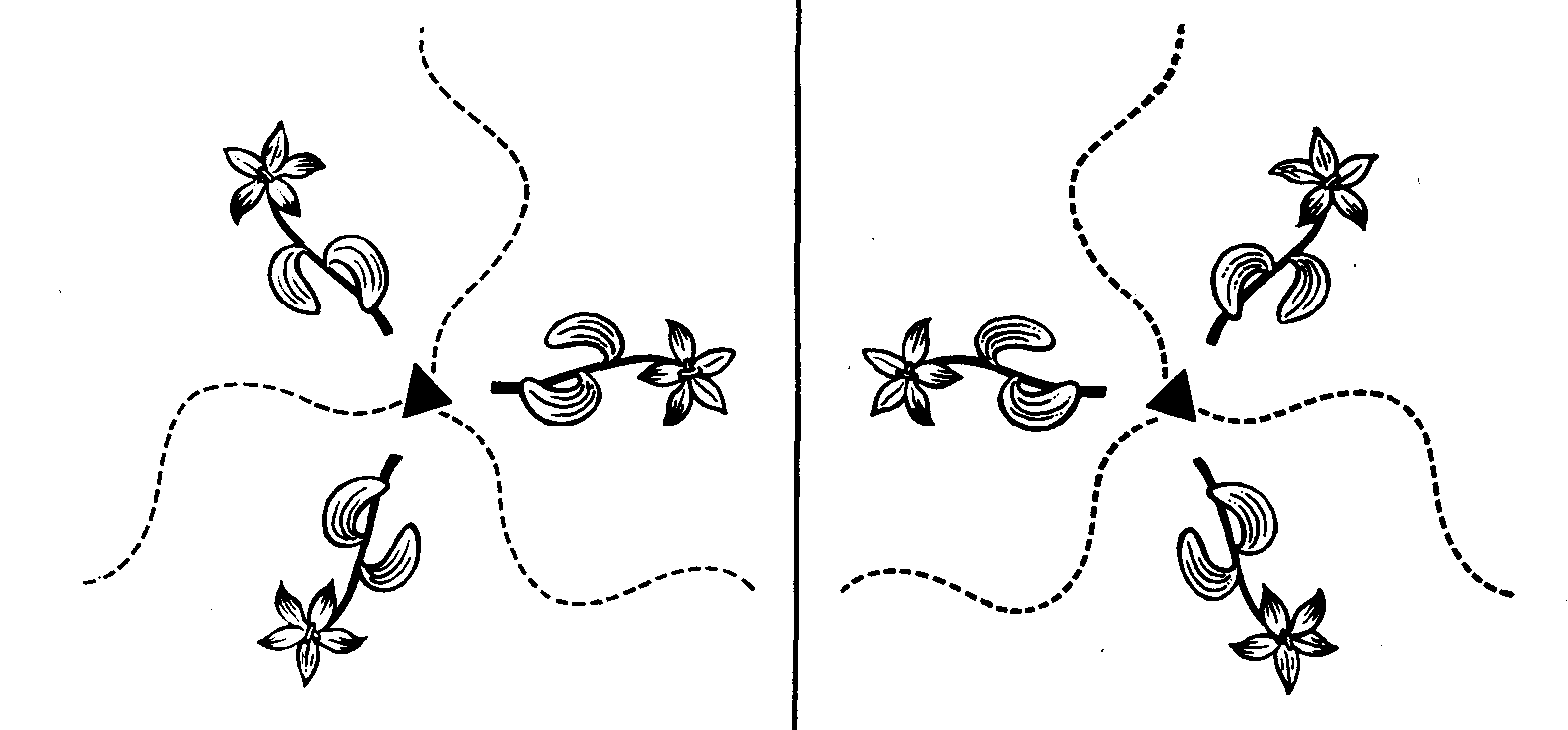
Рис. 3. Операция симметрии – зеркальное отражение. Показано на примере правой и левой перчаток (а) и цветков (б), расположенных на оси симметрии третьего порядка – эта ось обозначена треугольником и располагается перпендикулярно рисунку |
|

К преобразованиям симметрии S относятся такие преобразования координат, при которых сохраняется инвариантность расстояний между двумя произвольно выбранными точками тела:
r' = S( r ) = r, (1.4)
Если после выполнения этих преобразований происходит совмещение тела с самим собой, то преобразования (1.4) принадлежат к группе линейных преобразований. Связь между координатами x'i и xj задается матрицей с постоянными коэффициентами вида:
x1 x2 x3
x'1 a11 a12 a13
x'2 a21 a22 a23
x'3 a31 a32 a33 (1.5)
Преобразования (1.5) в общем случае описывают однородные деформации, при которых прямые и плоскости преобразуются соответственно в прямые и плоскости. Требование (1.5) означает, что преобразования координат должны быть ортогональными и не изменяющими ни углов между прямыми, ни масштаба:
r'2 = r2 (1.6)
Например, ортогональная система координат остаётся ортогональной, а условие ортогональности имеет вид:
aik2 = 1, (1.7)
где aik – детерминант, составленный из коэффициентов матрицы (1.5). Из условия ортогональности (1.7) получаем:
aik = 1 (1.8)
Знак (+) означает, что преобразование не меняет типа системы координат, а знак () – что преобразование меняет тип системы координат – правая система переходит при этом в левую и наоборот (см. например, рис.3).
Первичным преобразованием симметрии является отражение в плоскости. Это симметричное преобразование, состоящее из двух элементарных операций отражений. При неограниченном числе отражений точки 1 и 2 преобразуются друг в друга. Порядок или кратность операции отражения в плоскости равны двум.
Пусть m является координатной плоскостью (X2X3), а ось X1 направлена по нормали к плоскости m. Тогда координаты группы двух симметрически эквивалентных точек, преобразующихся друг в друга отражением в координатной плоскости (X2X3), будут:
(x1, x2, x3) и (-x1, x2, x3). (1.9)
Отражение в центре симметрии – инверсия (i) является более сложным преобразованием по сравнению с отражением в плоскости. Его можно представить как результат отражений в трех взаимно перпендикулярных плоскостях. При отражении точки 1 в каждой из этих плоскостей изменяется знак у соответствующей координаты. Поэтому координаты симметрически эквивалентной точки 2, получаемой путем инверсии в начале координат, равны координатам точки 1 с измененными знаками:
(x1, x2, x3) и (x1, x2, x3), (1.10)
или, в векторной форме,
r2 = r1, (1.11)
откуда видно, что отражения в трех ортогональных плоскостях эквивалентны инверсии в точке пересечения этих плоскостей, являющейся центром симметрии. Отражениям в двух плоскостях эквивалентен поворот вокруг оси и трансляция.
Преобразования симметрии, не изменяющие тип системы координат, называют преобразованиями I рода, а изменяющие тип системы координат преобразованиями II рода. Движения тела – повороты и параллельные переносы – примеры преобразований симметрии I рода. Отражение в зеркальной плоскости и инверсия в центре симметрии – примеры преобразований симметрии II рода. Четное число преобразований симметрии II рода представляет собой преобразования симметрии I рода. Нечетное число преобразований симметрии II рода представляет собой преобразования симметрии II рода.
Плоскость отражения, ось поворота, центр инверсии, вектор переноса (трансляция) – это геометрические образы, с помощью которых можно осуществить соответствующие преобразования симметрии. Эти образы называют элементами симметрии.
Приведем обозначения некоторых из элементов симметрии с конечной кратностью:
P или m – плоскость симметрии;
Cn или n ось симметрии;
Sn – зеркально-поворотная ось симметрии, сочетающая поворот вокруг оси n с отражением в перпендикулярной к ней плоскости m;
n – инверсионная ось симметрии, сочетающая поворот вокруг оси n с инверсией в центре симметрии i, лежащем на оси поворота.