

1.3.2 Фільтрація зображень
Реальні зображення наряду з корисною інформацією можуть містити різні види завад. Джерелами завад є власні шуми оптичних зчитувачів, погана якість оригіналу, шуми каналів зв'язку тощо.
Найбільш розповсюдженою завадою є так званий адитивний білий шум. Його вплив на зображення полягає в адитивному спотворенні кольору або яскравості. Для ахроматичного зображення (зображення у градаціях сірого) вплив білого шуму можна описати за допомогою формули
![]() (1.11)
(1.11)
Тут
![]() – «ідеальне зображення»,
– «ідеальне зображення»,
![]() – зображення з завадами,
– зображення з завадами,
![]() – білий шум,
– білий шум,
![]() – розміри зображення.
– розміри зображення.
Крім білого шуму ще однією з поширених завад є імпульсна завада, або як її називають – завада «сіль – перець». Ця завада проявляється у виді окремих пікселів колір яких суттєво відрізняється від кольору пікселів з найближчого оточення.
Найпростішими методами боротьби з завадами є застосування локальних маскових фільтрів. Найбільш поширеним фільтрами є усереднюючий, гаусівський та медіанний.
При
фільтрації растрових зображень у якості
маски використовується квадратні
матриці розміру
![]() ,
тобто з непарною кількістю рядків та
стовпчиків. У випадку маски
,
тобто з непарною кількістю рядків та
стовпчиків. У випадку маски
![]() ,
ця матриця має вид:
,
ця матриця має вид:
 (1.12)
(1.12)
Коефіцієнт
![]() та значення елементів матриці
та значення елементів матриці
![]() обираються в залежності від виду фільтру
та характеру завад. Елементи цієї
матриці, за певних умов, повинні
задовольняти умові інваріантності
відносно обертань на 900
або 450.
обираються в залежності від виду фільтру
та характеру завад. Елементи цієї
матриці, за певних умов, повинні
задовольняти умові інваріантності
відносно обертань на 900
або 450.
Для
визначення кольору центрального пікселу
використовується згортка матриці
![]() з квадратною частиною (маскою) зображення
такого ж розміру. Нехай маска зображення
має вид
з квадратною частиною (маскою) зображення
такого ж розміру. Нехай маска зображення
має вид
 . (1.13)
. (1.13)
Тоді згортка цих матриць буде обчислюватись за формулою
 (1.14)
(1.14)
де
![]() – значення кольору пікселу на обробленому
зображенні.
– значення кольору пікселу на обробленому
зображенні.
Для того щоб відфільтрувати зображення обробляються всі його пікселі.
Для усереднюючого фільтру використовуються наступні матриці


Усереднюючий фільтр використовується у випадку наявності на зображення адитивного білого шуму. Слід зазначити що використання цього фільтру на ряду з видаленням шуму згладжує контури об’єктів.
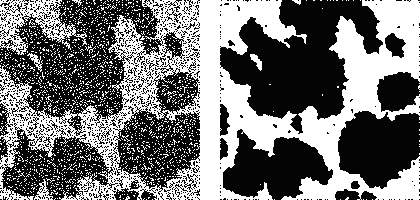
Наведемо результати використання такого типу фільтрів для покращення якості зображення (див. рис. 1.9). Слід зазначити, що при використанні цього фільтру у випадку наявності імпульсного (зображення на рис зліва знизу) шуму приводить до появи практично білого шуму на зображенні. Взагалі не існує формальних методів за допомогою яких можна визначити, який з фільтрів слід використовувати, для того щоб видалити всі завади. Як правило для конкретного типу зображень з завадами обирають той фільтр, який дає найкращий результат.
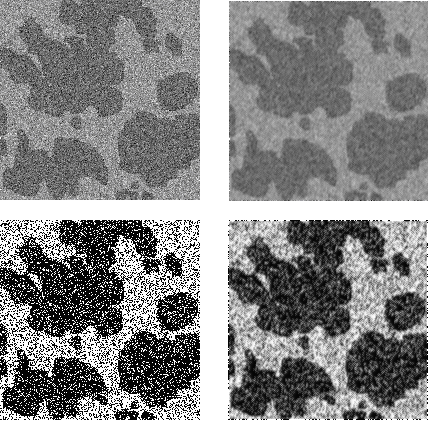 Рисунок
1.9 – Використання усереднюючого фільтру
(зліва – зображення з завадами, справа
– оброблені фільтром)
Рисунок
1.9 – Використання усереднюючого фільтру
(зліва – зображення з завадами, справа
– оброблені фільтром)
У випадку наявності імпульсного шуму найкращі результати дає використання медіанної фільтрації.
Медіанний
фільтр реалізується наступним чином.
Зображення з маски зчитується в
одновимірний масив
![]() ,
кількість елементів якого дорівнює
,
кількість елементів якого дорівнює
![]() .
Елементи цього масиву впорядковуються
у порядку зростання. Значення яскравості
пікселу, наприклад,
.
Елементи цього масиву впорядковуються
у порядку зростання. Значення яскравості
пікселу, наприклад,
![]() ,
що розташований у центрі маски замінюється
значенням
,
що розташований у центрі маски замінюється
значенням
![]() ,
тобто медіаною.
,
тобто медіаною.
Наприклад,
якщо
![]() ,
то після впорядкування він буде мати
вид
,
то після впорядкування він буде мати
вид
![]() ,
відповідно
,
відповідно
![]() .
.
На рис. 1.10 наведено результат застосування медіанного фільтру до зображення з імпульсним шумом.
 Рисунок
1.10 – Фільтрація імпульсного шуму
медіанним фільтром
Рисунок
1.10 – Фільтрація імпульсного шуму
медіанним фільтром
Якщо порівняти результати фільтрації цього ж зображення, то можна дійти висновку, застосування медіанного фільтру дає більш якісні результати у порівнянні з усереднюючим фільтром.
Гаусівський фільтр визначається з використанням функції двовимірного розподілу щільності ймовірності Гауса з нульовим середнім значенням
 , (1.15)
, (1.15)
де
![]() – координати,
– координати,
![]() – дисперсія.
– дисперсія.
На рис.
1.11 наведено графік двовимірної
функції Гауса з дисперсією
![]() та нульовим середнім значенням.
та нульовим середнім значенням.
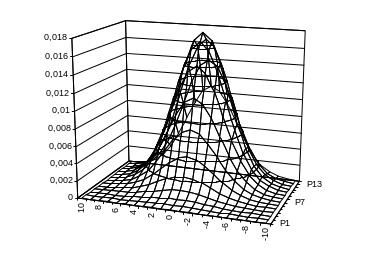 Рисунок
1.11 – Двовимірна функція
Гауса.
Рисунок
1.11 – Двовимірна функція
Гауса.
Для того щоб
побудувати гаусівський фільтр обирають
розмір маски та значення дисперсії.
Розглянемо це на прикладах побудови
гаусівського фільтра з масками
![]() та
та
![]() .
Для маски
координати її чарунок будуть мати
наступні значення
.
Для маски
координати її чарунок будуть мати
наступні значення
-
1 (1)
2 (0)
3 (-1)
1 (1)
1,1
1,0
1,-1
2 (0)
0,1
0,0
0,-1
3 (-1)
-1,1
-1,0
-1,-1
Оберемо
![]() та обчислимо значення функції Гауса
та обчислимо значення функції Гауса
Таблиця 1.1 – Значення функції Гауса для маски
-
1
0
-1
1
0,05857953
0,09658132
0,05857953
0
0,09658132
0,15923567
0,09658132
-1
0,05857953
0,09658132
0,05857953
На практиці використовуються цілі значення функції Гауса, для цього помножимо кожне значення на 20, тоді отримаємо, що

Аналогічним чином для маски при значенні множника 400 отримаємо
 .
.
Розглянемо результати фільтрації зображень з використанням побудованих гаусівських фільтрів.
 а) б) в)
а) б) в)
Рисунок 1.12 – Результати обробки вхідного зображення (а) гаусівськими фільтрами з маскою 3×3 – б) та 5×5 – в)
Як видно з наведених рисунків збільшення розміру маски приводить до більшого розмивання границь об’єктів на зображенні.