

11.Динамическое исследование механизмов. Приведение сил и масс в модели механизма.
Динамическая модель - модель системы, предназначенная для исследования ее свойств в функции времени (или модель системы, предназначенная для исследования в ней динамических явлений).
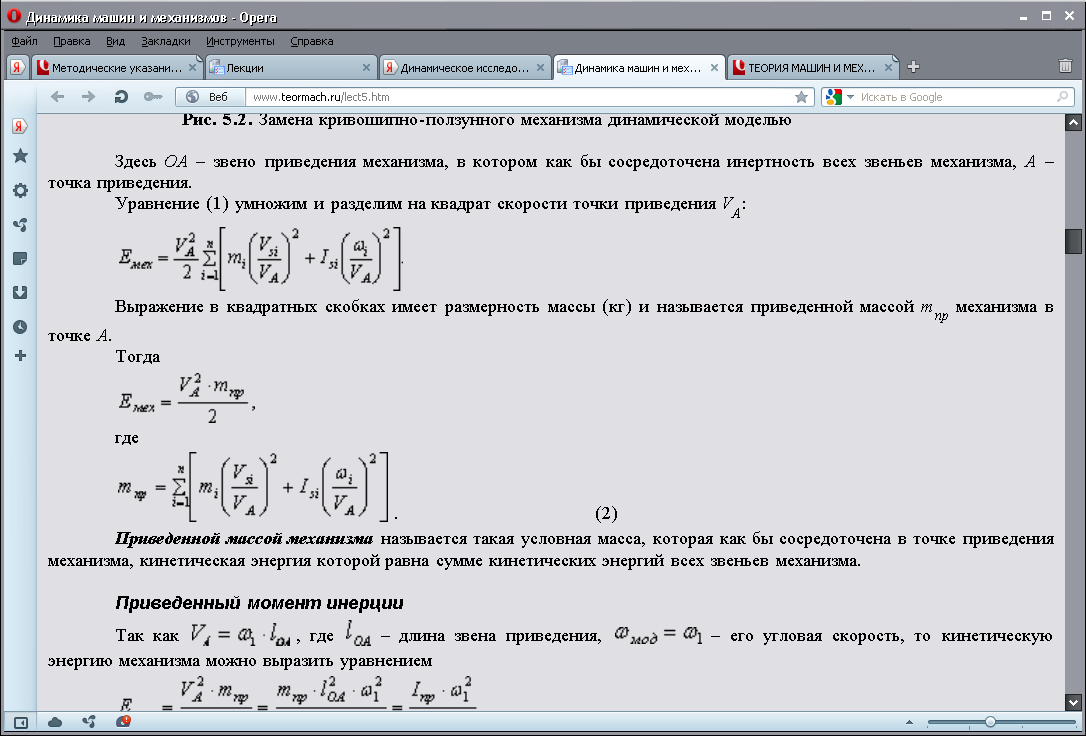
Анализ движения машинного агрегата, находящегося под действием приложенных к нему внешних сил, удобно проводить с использованием метода приведения масс и сил к какому-либо звену механизма. Он сводится к анализу динамики тела (звена приведения), к которому приведены все внешние силы и моменты. Чаще всего звеном приведения выступает ведущее звено механизма.
Задача динамического анализа – определение истинного закона движения ведущего звена механизма, находящегося под действием заданных внешних сил и моментов, действующих в машинном агрегате.
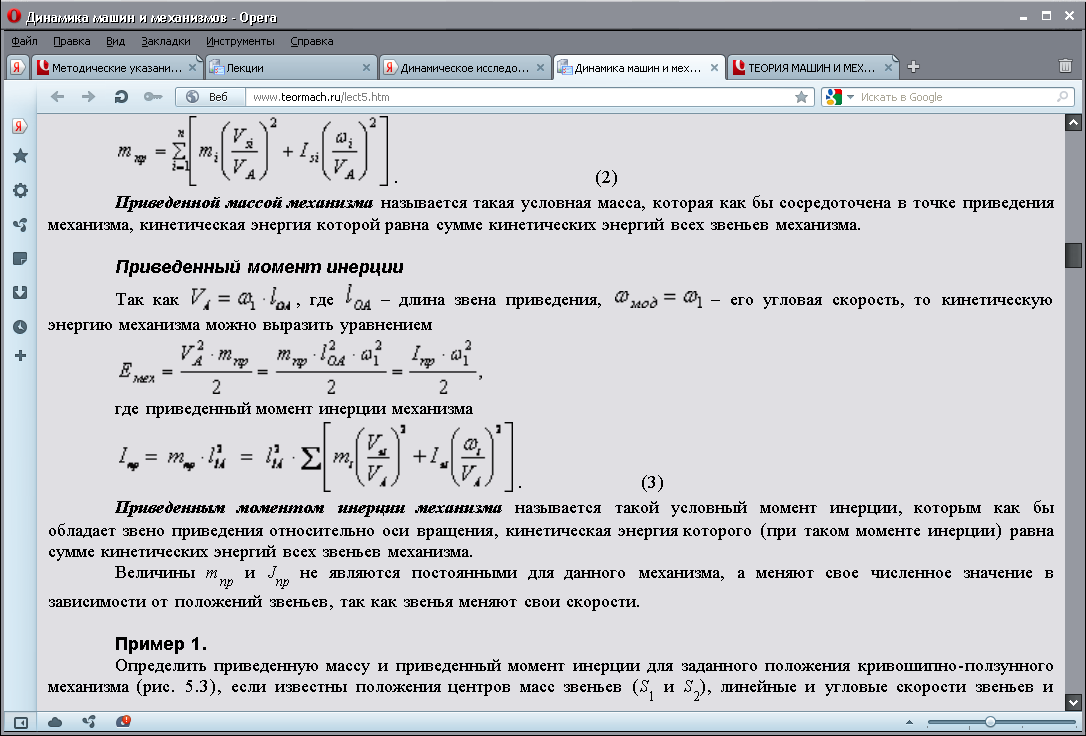
Приведенная масса механизма
Условно заменим механизм его динамической моделью. Например, кривошипно-ползунный механизм (рис. 4.2) заменим динамической моделью, состоящей из стойки и кривошипа.

12.Режимы движения механизмов. Дифференциальное уравнение движения механизмов.
Уравнение движения механизма в энергетической форме (в форме интеграла энергии)
. (5.11)
Оно используется для определения закона движения начального звена 1 .
4. Продифференцируем уравнение (5.11) по координате :
.
(5.12)
Полученное уравнение является уравнением движения начального звена 1 механизма в дифференциальной форме. Оно используется для определения углового ускорения начального звена.
Режимы движения механизмов:
Уравнение движения механизма (5.11) запишем в виде
 ,
(5.13)
,
(5.13)
где
![]() – положительная работа движущих сил и
отрицательная работа сил сопротивления.
– положительная работа движущих сил и
отрицательная работа сил сопротивления.
В зависимости от соотношения этих работ различают три режима (фазы) движения механизма (рис. 5.4):
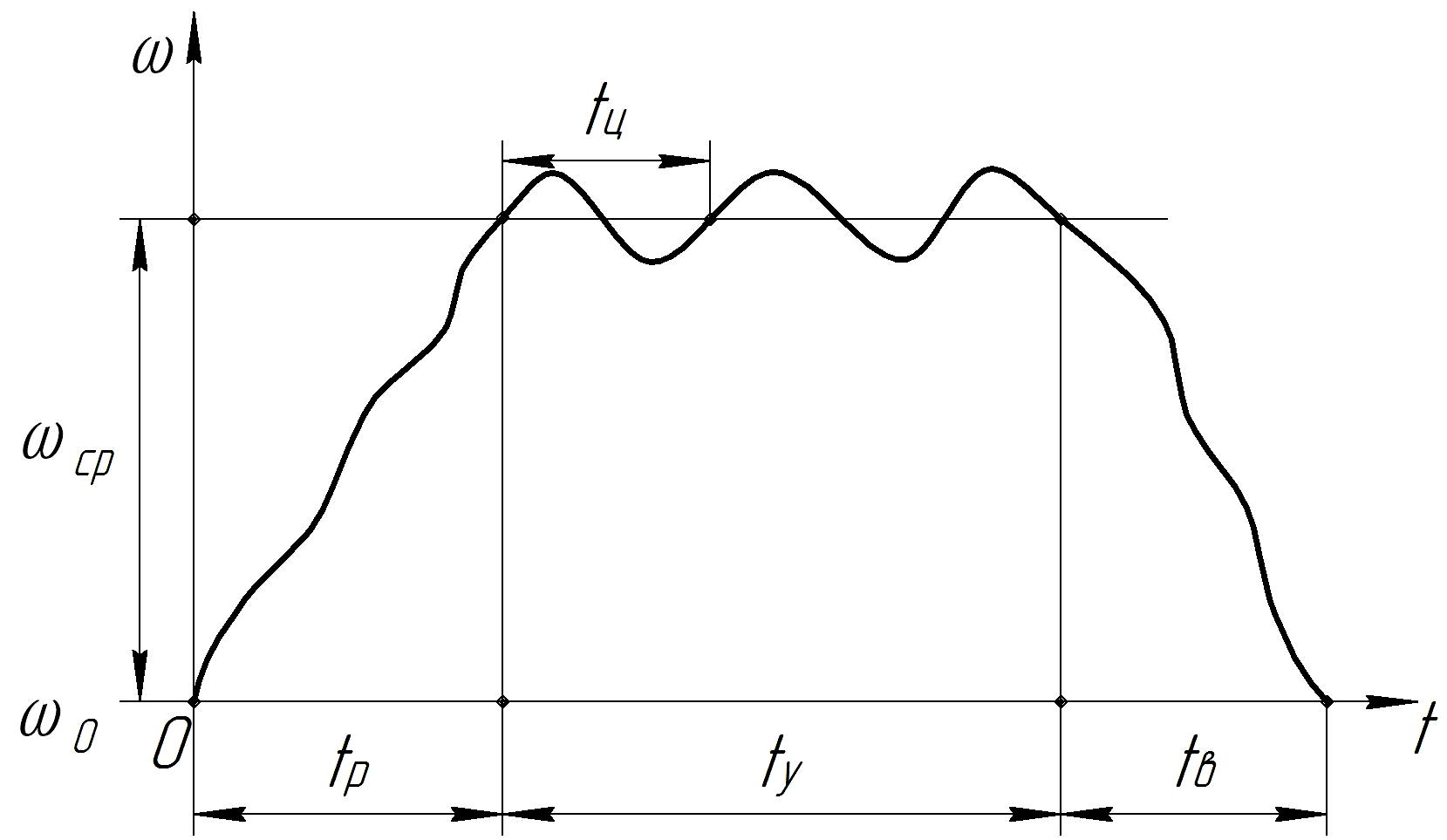
Рис. 5.4.
1.
Разбег (разгон)
в течение времени
![]() .
.
При
этом
![]() ,
угловая скорость начального звена
,
угловая скорость начального звена
![]() .
.
2.
Установившееся
движение в
течение времени
![]() .
При этом
.
При этом
![]() за время цикла
за время цикла
![]() ,
поэтому
,
поэтому
![]() .
Но внутри цикла
.
Но внутри цикла
![]() ,
поэтому мгновенные значения угловой
скорости начального звена периодически
изменяются в цикле от
,
поэтому мгновенные значения угловой
скорости начального звена периодически
изменяются в цикле от
![]() до
до
![]() около среднего значения
около среднего значения
![]() .
Это вызвано периодическим изменением
в цикле приведённых моментов
.
Это вызвано периодическим изменением
в цикле приведённых моментов
![]() и
и
![]() .
.
3.
Выбег (торможение)
в течение времени
![]() .
.
При
этом
![]() ,
,
![]() и в частном случае скорость доходит до
значения
и в частном случае скорость доходит до
значения
![]() .
.
Режимы разбега и выбега являются неустановившимися. Они могут происходить с большим ускорением или замедлением, которые вызывают значительные динамические нагрузки на звенья механизма и их перенапряжение. Изучение и расчет этих переходных режимов необходим для грамотного динамического проектирования механизмов.
13.Неравномерность движения механизмов. Коэффициент неравномерности. Расчёт параметров маховика.
Установившимся движением называют такое, при котором скорость начального звена 1 механизма является периодической функцией времени (рис.5.6).
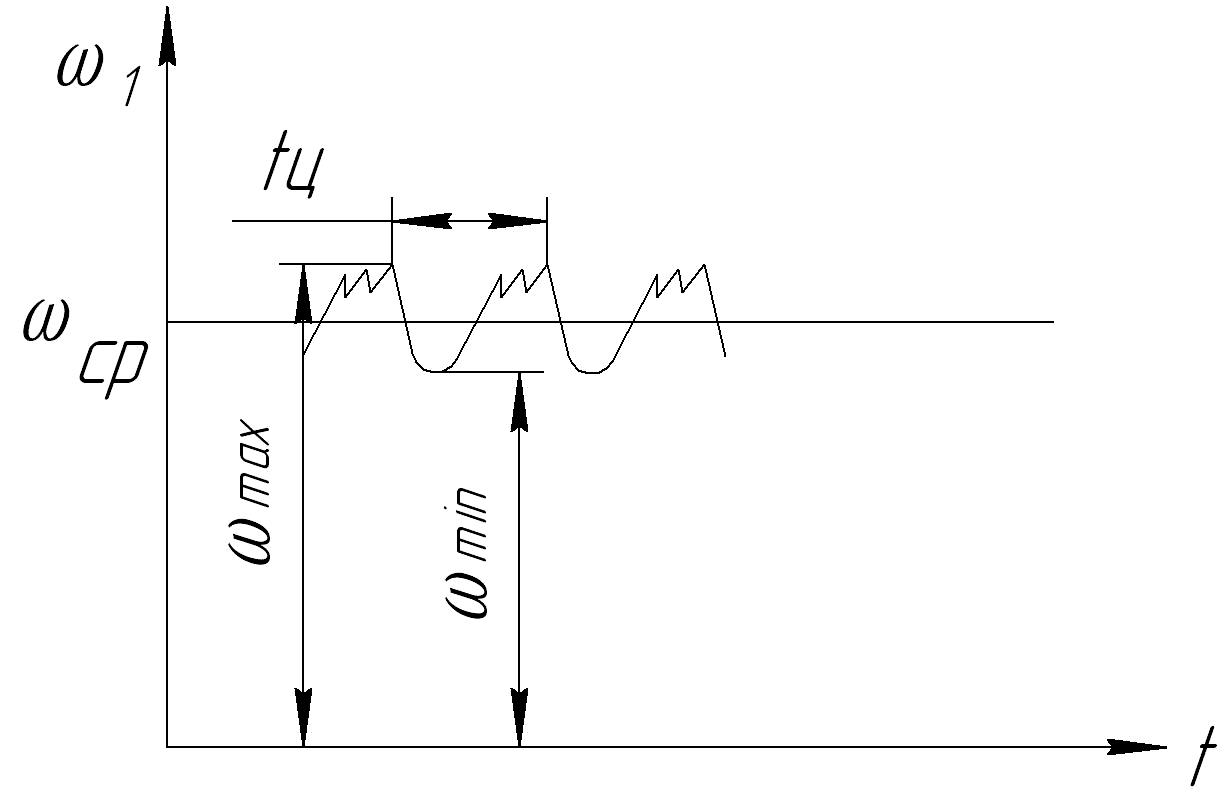
Такой
характер движения вызывается периодическим
изменением приложенных к механизму сил
и его приведённого момента инерции
![]() .
Основными энергетическими условиями
такого режима движения являются,
отнесённые ко времени цикла
,
характеристики механизма:
.
Основными энергетическими условиями
такого режима движения являются,
отнесённые ко времени цикла
,
характеристики механизма:
-
сумма работ всех сил
![]() ,
следовательно
,
следовательно
![]() ;
;
-
приращение кинетической энергии
![]() .
.
Неравномерность вращения (движения) начального звена 1 оценивают коэффициентом неравномерности
![]() ,
(5.16)
,
(5.16)
где средняя угловая скорость начального звена
![]() (5.17)
(5.17)
Чрезмерные
колебания скорости начального звена
и, следовательно, скоростей остальных
звеньев механизма вызывают значительные
динамические нагрузки на них, снижают
долговечность и надёжность машин.
Ухудшается и качество рабочего процесса
машины. Поэтому на практике установлена
допустимая величина
![]() этого коэффициента для различных машин.
этого коэффициента для различных машин.
При
динамическом синтезе коэффициент
![]() предварительно определяют, используя
уравнение (5.13) движения начального звена
(ведущего вала машины) с учётом равенства
работ движущих сил и сил сопротивления
за цикл
предварительно определяют, используя
уравнение (5.13) движения начального звена
(ведущего вала машины) с учётом равенства
работ движущих сил и сил сопротивления
за цикл
![]() .
Если оказалось, что коэффициент
неравномерности
.
Если оказалось, что коэффициент
неравномерности
![]() ,
то его можно уменьшить, увеличив
инертность ведущего вала. Для этого на
нём устанавливают добавочную массу в
виде маховика с массивным ободом. Маховик
накапливает кинетическую энергию и
восполняет её недостаток у механизма
в моменты цикла движения, когда работа
движущих сил
,
то его можно уменьшить, увеличив
инертность ведущего вала. Для этого на
нём устанавливают добавочную массу в
виде маховика с массивным ободом. Маховик
накапливает кинетическую энергию и
восполняет её недостаток у механизма
в моменты цикла движения, когда работа
движущих сил
![]() .
Тем самым маховик ограничивает колебания
скорости начального звена и снижает
величину
.
.
Тем самым маховик ограничивает колебания
скорости начального звена и снижает
величину
.
Найдём
требуемый
момент инерции маховика
![]() :
:
— решив совместно уравнения (5.16) и (5.17) получим:
![]()
![]() ;
;

— используя
уравнения (5.6) и (5.11) строим диаграмму
энергомасс
![]() для цикла вращения начального звена
(угла поворота)
для цикла вращения начального звена
(угла поворота)
![]() (рис.5.7);
(рис.5.7);
— используя
формулу (5.15) для угловой скорости
начального
звена 1 по
кривой энергомасс
![]() ,
находим:
,
находим:

— к
кривой энергомасс проводим касательные
m-m,
n-n
под углами
![]() и
и
![]() .
Точка их пересечения
.
Точка их пересечения
![]() – начало координат новой системы отсчета
– начало координат новой системы отсчета
![]() ,
в которой
,
в которой
![]() – полная кинетическая энергия и момент
инерции механизма с маховиком.
– полная кинетическая энергия и момент
инерции механизма с маховиком.
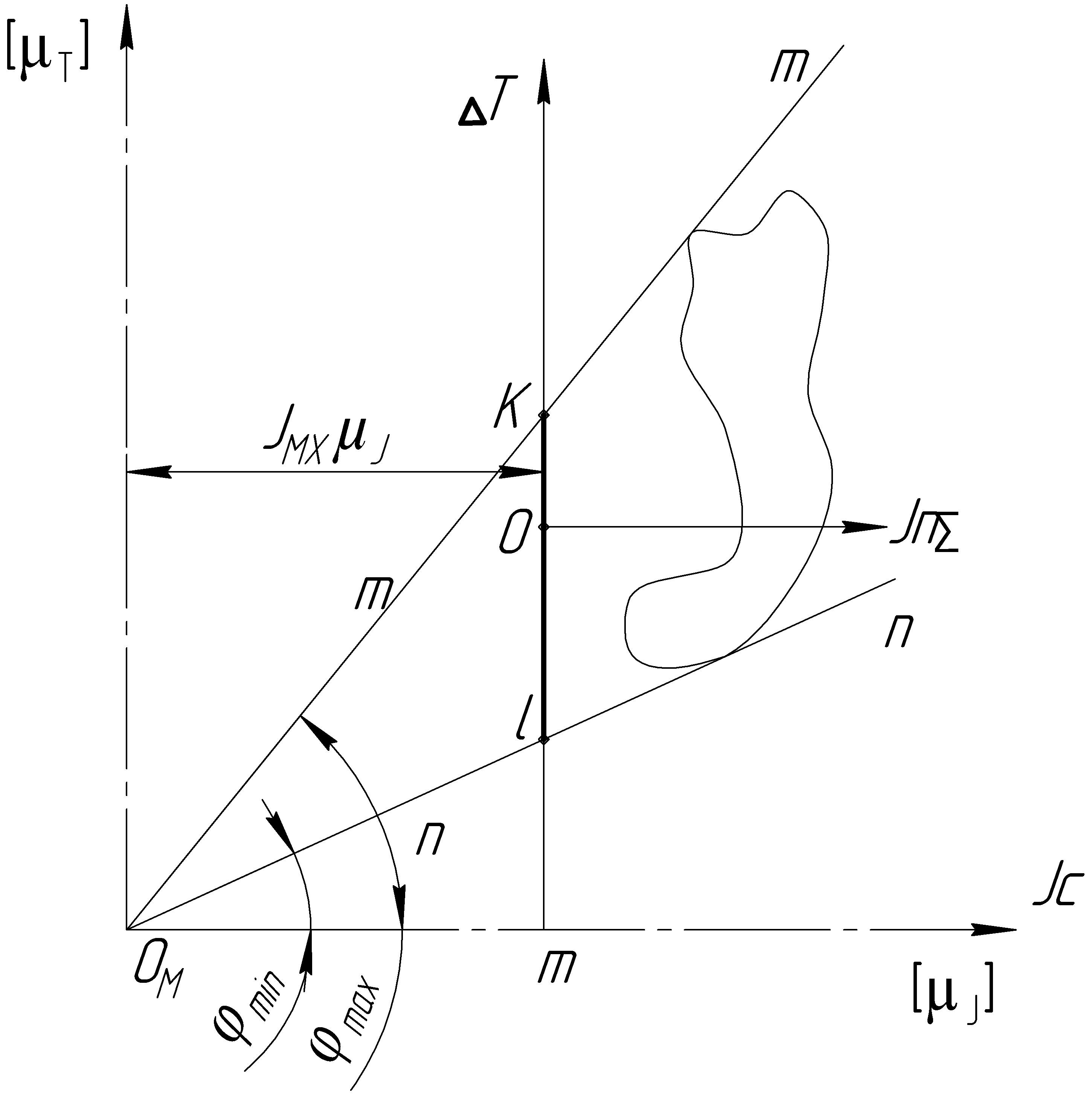
Рис. 5.7.
Из рис. 5.7 находим:
Момент
инерции маховика
![]() [кг.м2].
[кг.м2].
Приняв
![]() ,
получим необходимый момент инерции
маховика.
,
получим необходимый момент инерции
маховика.
Заметим, что маховик оказываетсвое действие по уменьшению колебания скорости начального звена только при установившемся режиме движения механизма.